基于视觉传达的虚拟机械产品展示系统设计
2021-05-26刘怡泓
刘怡泓

【摘 要】虚拟机械产品展示系统能够为用户提供高分辨率、高质量及大范围的立体影像,能够提供给用户更好的视觉传达服务,在机械设计领域中有很大的应用潜力。文章以视觉传达为基础,对虚拟机械产品展示系统组成进行阐述,并分析了虚拟机械产品展示系统的系统程序、模型基本操作功能、系统用户界面及多通道设置的设计和实现。
【关键词】虚拟机械产品展示系统;机械产品;多通道
【中图分类号】TN911.73-34;TP39【文献标识码】A【文章编号】1674-0688(2021)04-0043-03
任何类型的产品展示最有效的方式就是将产品真实地呈现在用户面前。但是随着科学技术的发展和突破,计算机技术在各个领域得到了广泛应用,例如虚拟现实技术、可视化技术、信息采集技术、传感技术等,将产品真实呈现在用户面前的方式已经不能够满足用户在信息爆炸时代的要求 [1]。因此,当前在很多产品展示中,主要使用图片加文字的形式对产品进行展示,但是这样的形式还停留在静态平面层面上,难以将产品本身的特点充分展现出来,尤其是在机械产品的展示中,更加无法将其特点展示出来。所以,从目前来看,對于机械产品的展示可以通过虚拟机械产品展示系统进行,这样不仅可以促使用户更加直观地了解机械产品的特点,还能够实现用户与产品的互动,从而增强用户对产品的了解程度。
1 虚拟机械产品展示系统的组成
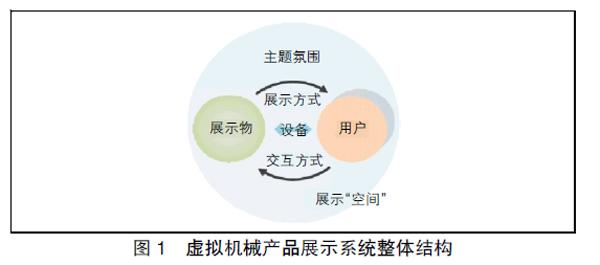
在传统产品展示中,必须有一定的展示空间,比如需要布置机械产品的实物或者实物的模型为参观人员提供服务。由此可以看出,在机械产品展示中主要存在以下3种展示要素,即展示物品、展示空间、展示用户。对于虚拟空间来说,也主要是由这3种要素构成,但是虚拟展示的方式发生了转变 [2]。虚拟机械产品展示系统的整体结构如图1所示。
2 虚拟机械产品展示系统的设计和实现
2.1 虚拟机械产品展示系统主控结构设计
展示系统的总体结构拟采用以PC工作站为主体的多节点危机网络结构。PC工作站具有性价比高、操作简单、升级方便且可根据需要拓展通道的沉浸环境。多节点的展示系统包括一个主节点和许多从节点,每个节点都相当于一台PC图形工作站,所有节点均拥有一份相同的应用程序和数据拷贝。PC工作站的核心是CPU和图形加速处理器,对于需要实现立体显示的虚拟机械产品展示系统需配置Pentiun4 Xeon中央处理器和能够双显示输出的专业级图形显卡。PC工作站系统的软件部分采用VC++6.0开发,以标准API的形式封装,最终形成一个集成式的软件系统,便于管理和配置多通道系统。
2.2 投影显示系统的设计
投影显示系统在设计时要考虑通道的拓展性、屏幕的分辨率、用户的沉浸感及系统的维护升级成本。因此,投影显示系统将采用6个通道组成,左右眼分别连接3个通道,每个通道有40°的水平视角,可现实120°的展示环境。同时,整体系统采用被动立体显示的方案。投影显示系统通常由投影仪、投影屏幕和计算机硬件3个部分组成。投影仪按照不同的工作原理可以分为三枪投影仪、液晶投影仪和数字光处理投影仪。虚拟产品的显示对于实时性有一定的要求,因此投影仪需要具有较快的响应速度。同时,不同的立体显示技术需要配不同的投影仪。立体显示技术主要有主动立体模式和被动立体模式。主动立体模式下左右影像依照顺序逐帧显示,以60 Hz的刷新率输出且合成的影像要达到120 Hz,这需要带宽较宽的投影仪。被动立体模式则是使用两套不同的设备分别对左右眼的影像进行投影,左右眼影像因为偏振光角度的不同而产生区分,对投影仪的要求相比主动立体模式较低,但投影屏幕需要专门的材料。本设计在查找了不同的投影仪参数后选择输出亮度高、分辨率高且色彩还原度高的CRT投影仪。投影屏幕的选择主要依据投影方式,投影方式分为前投和背投两种。前投是指投影机的安装位置与观众位置是屏幕的同一侧,投影仪放出的光线投影到屏幕上,屏幕形成图像后被观众接收。背投是将观众和投影仪分别置于屏幕的两侧,投影仪发出的光线透过屏幕被人眼接收。使用前投的屏幕可以做成任意的尺寸,但必须控制好环境光,才能呈现好的观看效果,适合暗室投影;背投在屏幕尺寸上有一定的要求,但对环境光不需要控制,适合照明良好的环境。正投的屏幕有金属弧型屏幕和平面屏幕,弧型屏幕的增益大、视角小且能适应较强的环境光。背投的屏幕类型有硬质背投式和软质背投式。经分析,本系统采用正投屏幕的金属弧型幕实现立体式投影。计算机硬件主要是计算处理器和图形处理器的选择。目前,高性能的PC在计算能力和图形能力上已经逐渐接近专业的图形工作站且更符合多节点网络通道模式。在比较了多家公司的图形卡参数后,最终选择NVIDIA Quadro FX 3000G显卡。
2.3 网络通信系统的设计
网络通信系统的功能是将视点参数、控制命令及用户自定义的PDU从主节点发送到从节点,而从节点又可以通过网络通信系统将实时状态与任务请求发送给主节点。为了保证在展示过程中不出现严重的延迟甚至画面跳跃感,每个通道都需要达到30 fps的显示速度。因此,采用基于TCP/IP协议的UDP通信方式。同时,为了保证主机和从机之间的信息传递,还需定义包括视点参数和控制命令在内的消息变量,并使用负载平衡算法降低某个节点三角面数量骤增的影响。
2.4 多通道设置的设计和实现
2.4.1 节点间通信模块的设计和实现
在节点通信模块方面,主要采用UDP通信协议,服务器和终端之间不需要建立连接,同时在整个过程结束之后也不需要专门断开连接。服务器和终端只需要建立套接字端口就可以进行信息读取或者信息写入操作,完成信息传递 [4]。具体设计过程如下:首先,终端和服务器建立套接字端口,并且调用服务器中的绑定函数对端口进行分配;其次,在程序开发过程中,如果端口中存在套接字,终端就通过绑定函数向服务器发送数据和信息;最后,在信息数据完成传递之后,通过绑定函数将套接字关闭。具体过程如图2所示。
在节点通信模块程序设计中,主要是对网络节点进行配置和管理,其中具体设计原理如下:一是通过主节点和从节点启动配置管理程序;二是通过主节点对网络中的各个节点状态进行查询,找到其中可以使用的节点;三是通过对预配置文件的读取初始化节点;四是在节点完成初始化之后向主节点发送完整的信息;五是在所有节点都完成相应配置之后,通过主节点启动其他所有节点,从而开启所有节点的视景仿真程序。具体工作原理如图3所示。
当节点通信模块完成配置之后,就可以将所有信息转化为文件形式进行存储,在下一次对节点通信模块进行使用时,不需要再配置,而是直接通过存储的文件完成节点的初始化[5]。在配置文件中,除了包含不同节点的信息以外,还包含IP地址、位置等信息。此外,在虚拟机械产品展示系统运行过程中,主节点会不断地向从节点发送数据信息,同时要接收用户发来的操作指令,但是系统本身又要求不能够消耗过多的资源,以免影响用户操作。因此,在虚拟机械产品展示系统设计过程中,不能够采用单线程模式,而应该通过多线程模式保障系统能够支撑多任务同时进行。同时,在主节点和从节点之间应该设计两个程序,其中前台程序负责接收用户发来的指令,后台程序負责主节点向从节点发送的信息。
在主节点和从节点之间通信方式设计方面,主要设计了两种通信方式:一种是通过主节点对从节点进行控制,同时接收从节点返回信息的点对点方式;另一种是通过主节点向所有从节点发送信息的一点对多点方式,该方式可以通过多通道通信及广播通信实现。
2.4.2 投影拼接模块的设计与实现
该模块是虚拟机械产品展示系统的核心,其主要是对几何失真、图像色彩失真及投影区边缘融合等方面进行校正,以此促使最终展示效果能够更好地将信息传递给用户。在本系统中,投影拼接模块主要是通过软件方式实现。同时,在该模块中设置6台投影设备,以3台为1组 [6]。在进行平面投影时,启动其中的一组投影设备进行工作,在进行立体投影时则是两组同时工作,以此实现立体投影。投影模块设计的具体步骤如下。
第一,匹配多通道任务参数。在融合表中,如果存在需要融合的任务,就需要输入该融合任务的参数。如果在融合表中存在一个以上的融合任务,就需要遵循最近原则,将最后一个任务作为起点,按照融合表中的次序进行匹配。如果在匹配过程中某任务匹配成功,就需要对该任务是否实现融合进行检查,如果融合成功,就需要将该任务放置到任务列表中,在程序处理完成之后,将任务从列表中删除;如果没有融合成功,就需要返回操作系统中。如果匹配不成功,就需要将它交给事件判断程序进行处理。第二,动作输入。事件判断程序会将所输入的事件和动作输入进行匹配。如果匹配成功,就会将该任务加入融合表中,并且以融合表中的事件排列情况和次序从最后向前进行输入匹配。在此过程中,如果某任务和某事件的参数输入成功匹配,就对该任务是否融合成功进行检查。如果融合成功,就将该任务放置到任务列表中,交由应用程序进行处理,同时将该任务从列表中删除。如果没有融合成功,则对下一个事件进行匹配,最终到所有事件全部匹配完成为止。第三,任务输入。如果在输入过程中,所输入的不是多通道任务输入或者参数输入,此时就将该任务放置到任务列表中,交由应用程序进行处理。第四,超时。在融合表中如果在长时间内任务没有实现融合,出现超时,此时就将任务从融合表中删除。第五,匹配。在参数匹配过程中,考虑到输入语音本身具有多义性,因此应该将输入先交由应用程序进行处理,在应用程序对输入语义进行解释之后,再返回任务列表中进行匹配。
在本虚拟机械产品展示系统中,设置有6台投影设备,其中3台主要提供图像的显示输入,另外3台则是配合覆盖显示的矩形区域,保障投影图像之间存在有一定重叠,以便后期进行融合 [7]。在本系统中,服务器的主节点从节点中获取相关投影信息,同时运行校正程序,通过计算得出每一台投影设备本身的校正信息,在对校正信息处理完成之后,将这些信息传输到显示节点中,保障最终所投影的图形更加清晰。在设计过程中,为了能够让后期校正更加便捷,设计了校正网络,通过服务器节点中的设置程序进行几何校正,促使投影的场景实现正确拼接。
在本系统中主要采用CRT投影仪。该投影仪本身色彩较为丰富,有着更好的还原性,同时具备强大的几何失真调控功能。在实际投影中,往往会出现因为投影仪之间色彩差异或者投影仪型号不同出现图像色彩不一致的现象,影响最终的视觉传达效果。因此,在本系统中使用了相同型号投影设备对该问题进行优化处理。此外,在边缘缝合方面,本系统主要使用全屏多极灰度追踪方法进行处理。在实际拼接中存在重叠,重叠部分的亮度相较于未重叠部分更高,十分引人注目,因此在操作过程中需要对重叠部分进行亮度调整,实现投影之间的无缝连接。通常情况下,主要是使用羽化技术进行处理,即通过对投影设备设置羽化度进行调整,如果在进行优化的过程中,重叠区的亮度没有达到整个系统的要求,则可以通过对色彩的调整,促使投影效果达到系统要求。
参 考 文 献
[1]刘春芳,程熙,谢利,等.基于OSG的机械产品虚拟拆装展示系统的设计[J].信息技术,2016(10):48-51,
55.
[2]俞璋凌,张萍,钟华.基于Java 3D技术的产品网络虚拟展示研究[J].湖北工业大学学报,2010,25(4):42-44.
[3]冯帆,杜江,乔虎,等.机械产品装配信息在虚拟现实环境中的表达[J].机械,2018,45(11):6-11.
[4]王柳兵,景军锋,苏泽斌.基于WebGL的纽扣三维展示系统[J].西安工程大学学报,2017,31(5):606-611.
[5]梁祖贤.基于VRP技术的“盛唐古韵”家具网站虚拟展示设计[D].长沙:中南林业科技大学,2016.
[6]石纯山.港口机械设备虚拟交互展示系统设计与实现[D].武汉:武汉理工大学,2013.
[7]吴雪.个性化定制产品虚拟展示技术及实现[D].西安:西安工程大学,2017.
