AGV混合导引系统的研究与实现
2021-05-26周正军文生平
周正军 张 豪 文生平
(1.广州市井源机电设备有限公司,广东 广州 510000;2.华南理工大学机械与汽车工程学院,广东 广州 510000)
0 引言
物流是当今社会生产运输中至关重要的1个环节,而其效率的高低对生产过程的各个方面有着直接且深远的影响。自动导引车(Automated Guided Vehicle,AGV)是现代化生产物流系统的重要设备,它能够自动沿着规定路径将货物送到指定工作点,完成一系列的任务[1-2]。虽然AGV移动机器人的应用在国外已经非常普遍了,但是国内起步时间相对较晚,技术也还不够成熟,主要使用技术含量较低的磁带导引工业移动机器人。相比之下,电磁导引具有更高的可靠性,其工作原理是在AGV规定的行驶路线上铺设专用电缆,然后通过导通低频正弦电流产生磁场,AGV的电磁感应传感器根据检测到的磁场强度对偏差进行矫正[3]。尽管国内己经开发出电磁导引系统,但是AGV只能在单环路等简单的环境中运行。
AGV混合导引系统采用电磁与RFID混合导引,提高了机器人的工作精度,解决了电磁导航存在不能适应复杂路径的问题。整个系统还包括控制系统、通信系统、导航系统、电池电源、移载系统、安全系统和一些移动机器人辅助机构,实现了对AGV的导航、定位和路径规划等技术的突破。
1 电磁与RFID的混合导引方法
1.1 AGV电磁导引原理
在AGV规定的行驶路线上铺设专用电缆,然后导通低频正弦电流产生磁场。AGV的电磁感应传感器由左右2个感应线圈组成,在小车沿线路行走时输出磁场强度差动信号[4],根据图1中电磁感应传感器的输出信号与偏移量的关系,可以计算AGV的位姿误差并对其进行相应的纠偏控制。

图1 电磁感应线圈的感应信号与偏移量的关系
1.2 RFID定位与导航路径选择
在电磁导引的基础上,采用RFID进行AGV定位,定位点设置在AGV需要进行路径选择的分岔路口[5-7]。该文提出了3种导航路径的选择方法。
1.2.1 预定轨迹法
如图2所示,在AVG的行驶路线上预埋了3条电磁线A、B和C,根据A、B和C3条电磁线通入的交流信号频率的不同,其导航过程也不同。

图2 预定轨迹法示意图
给预埋的3条线通入同频率的交流信号,工作过程:AGV沿着电磁线运行,其运行路径已通过AGV集群无线通信预置到AGV控制系统中,当感应到第一个RFID信号后,如果预置是路径A,那么AGV直行;如果预置是路径B,那么AGV左转,再沿着路径B运行;如果预置是路径C,那么AGV先直行,感应到第二个左转RFID后再左转。
给预埋的3条线通入不同频率的交流信号,与同频率信号线的工作方式不同的是,电磁传感器除了感应信号的强弱之外,还需要感应信号的频率,该频率信号可以作为AGV运行路径的导引信号。设置A、B和C 3条路径的导引频率分别为f1、f2、f3,在主要运行路径A,用频率f1导引,同时为了避免干扰,频率为f2、f3的电磁线采用屏蔽线[8];在路径A与路径 B的交叉处,路径B上的电磁线转换为非屏蔽的电磁线,此时存在2种引导频率信号,AGV 在感应到RFID信号后,如果预置是路径A则自动直行,如果是路径B则沿着频率为f2的电磁线运行。
1.2.2 树枝分岔法
树枝分岔法在预定轨迹法的基础上进行了变化,如图3所示,AGV 有3条运行路径分别为 A、B和C,但是3条运行路径都采用1根电磁线导引,其工作过程为:AGV沿着电磁线运行,其运行路径已通过AGV集群无线通信预置到AGV控制系统中,当感应到第一个RFID信号后,如果预置是路径A,那么AGV直行;如果预置是路径B,那么AGV沿着电磁线运行。
在树枝分叉法中,AGV直行时会出现一段导航盲区,该盲区对传感器和控制的精度有较高要求。
1.2.3 互补电磁传感器法
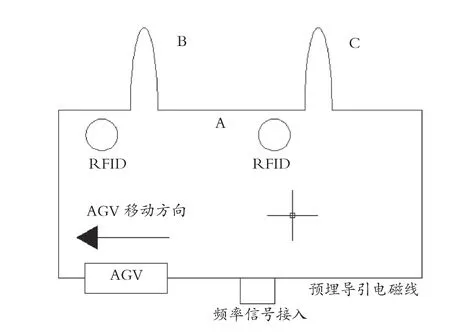
图3 树枝分岔法示意图
互补电磁传感器法是在AGV上安装2对导航用电磁传感器,如图4所示,其导航路径预埋的电磁线与树枝分岔法相同,如图3所示。
2对导航用电磁传感器分别安装在AGV的前端和后端,当AGV感应到RFID信号后,如果预置的导航路径为路径A,那么AGV在后面一对电磁传感器的导引下继续直行,当后面一对导航电磁传感器失去导航信号引导时,将导航引导传感器切换为前面一对导航传感器,AGV就不会出现导航盲区;如果预置的导航路径为路径B,那么AGV在后面一对电磁传感器的导引下沿着路径B行驶。
需要注意的是,前后两对电磁传感器的距离要大于盲区的距离,如果需要更精确的切换传感器方法,那么就可以另外设置定位RFID。

图4 互补电磁传感器安装示意图
2 AGV混合导引系统搭建
2.1 AGV硬件系统开发
采用单片机系统来对硬件结构进行设计,如图5所示,硬件系统主要具备电磁信号检测及处理、运动控制与通信的功能。电磁信号的检测及处理环节与单片机控制器共同构建了AGV硬件系统的主体,极大地简化了系统的硬件设计流程。

图5 AGV内部硬件架构图
硬件系统中各部分功能如下:1) 中央控制模块。以高性能微控制器为核心,收集传感器数据并对其进行计算和处理,将控制信号传递给马达控制模块,从而控制马达的运行状态。2) 电磁检测模块。在经过信号比较环节及处理软件的处理后,由左、右电磁传感器对位置进行纠偏,如果采用2对电磁传感器,那么就需要增加1个比较环节。3) 无线局域网模块。该模块实现了AGV与上位机、AGV与AGV之间的通信,还实现了对复杂系统的编排工作,它与广域网联网还可以实现异地控制和故障诊断的功能。4) 安全检测模块。AGV运行的安全监测分为接触式和非接触式两级安全监测。5) 马达控制模块。该模块控制马达的运转、停止和转向等。6) 外部I/O模块。该模块可以控制输入和输出。
2.2 电磁导航低频信号源设计
电磁导航低频信号源系统如图6所示,该系统主要由电源系统模块、单片机控制模块、键盘输入模块、液晶显示模块、PC机通信模块、单相H桥式逆变模块、DDS模块、SPWM波形生成模块、信号调理模块、三角波信号调理模块、三角波发生模块、驱动模块以及电压测量模块等部分组成。其中实线框中的超低频信号源模块和虚线框中的大功率电压源模块是最基本也是最重要的2个设计模块。
整个系统的流程如下:1) 信号源的控制核心是单片机控制模块,它发送控制指令给DDS模块,从而改变信号源的频率,同时能够实时检测输出电压电流的大小。2) 将DDS模块的输出信号发送给信号调理模块进行调理。3) 三角波调理模块对三角波发生器产生的等腰三角波进行放大调理。4) SPWM波形生成模块对DDS输出的正弦超低频信号和三角波调理模块输出的载波三角波进行调制,得到SPWM波。5) 驱动模块对SPWM波采取整形放大等措施;单相H桥式逆变模块再对信号的电压以及功率进行放大;为了满足微弱信号采集与系统运行的要求,低通滤波器滤除放大后信号中的高频信号。
在超低频信号源模块中,DDS模块和信号调理模块主要由AD9834芯片、差分放大、低通滤波和电压放大等调理电路组成,如图7所示。接口电路接收单片机MSP430F169发送的控制信号,DDS输出符合频率要求的低频正弦电流信号。其中,FSYNC为低电平有效控制输入,SDATA为串行数据输入,SCLK为串行时钟输入,IOUT和IOUTB为电流输出。
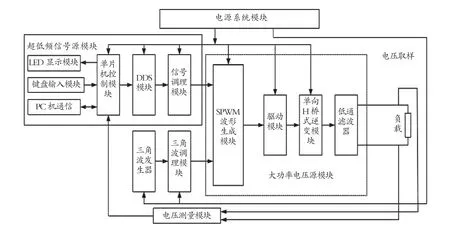
图6 电磁导航低频信号源系统框图
从DDS输出的低频正弦信号需要经过差分放大器的处理,抵消直流分量,并把双端输入信号变成单输出信号[9]。
对DDS输出的波形进行频谱分析可以看出,在主频率之外还存在很多的谐波分量以及数字模拟转换器(Digital to analog converter,DAC)的非线性产物,因此必须在DAC之后接入低通滤波器,如图8所示,其中v1、vA、vp、v0为所在点电压,C1、C2为电容,R1、Rf为电阻。由于DDS的输出频率为超低频,因此选择二阶压控低通滤波器[10],它由1个同相比例放大电路和2节RC滤波电路组成,同相比例放大电路为压控电压源器件,具有体积小、精度高、性能稳定且易于调试等优点,除此之外,它还具有高输入阻抗和低输出阻抗的优良特性,易于级联。
2.3 AGV软件系统开发
混合导引的AGV软件系统主要包括路径编辑器和地面管理系统软件。
2.3.1 路径编辑器与地面管理系统软件
路径编辑器主要用来对AGV导航路径进行编辑,编辑器包括动态实时监控模块、路径编辑与参数设置模块以及无线通信模块,通过路径编辑器可以预置AGV 的导航路径。其中,动态实时监控模块包括小车位姿监控(含数据显示和图形化显示)、导航通信状态显示以及控制状态显示;路径编辑与参数设置模块可以通过该编辑器修改AGV的运行路径,参数设置包括通信设置、AGV自身参数设置以及目标位置设置;无线通信模块包括地面系统、车载系统与车载系统间的通信[11]。
2.3.2 车载控制系统软件
车载控制系统软件包括无线通信模块软件和控制系统模块软件。其中,无线通信模块软件包括车载系统软件与车载系统的通信软件;控制系统模块软件包括手动控制软件、自动导航控制软件、故障检测诊断及处理软件、数据储存及保护和数据更新等软件。
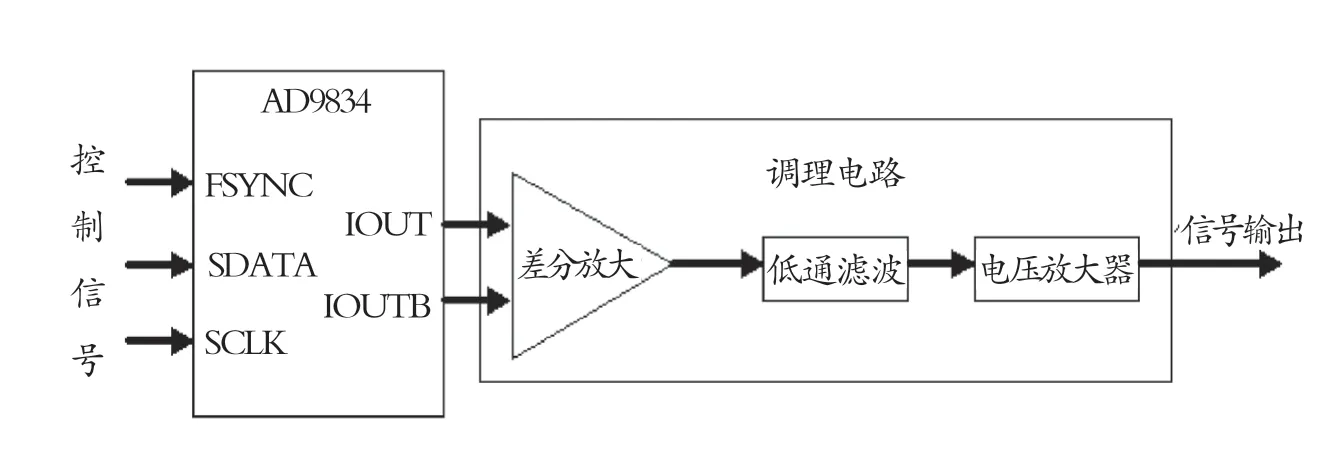
图7 DDS与信号调理模块设计原理图

图8 二阶压控低通滤波电路
2.4 安全系统设计
混合导引AGV的安全系统采用的是四级保护的安全措施,包括防撞杆、红外传感器、警笛、警灯及侧门的手动操作系统。
车体头部的障碍物检测装置装载有红外线传感器,通过预置停车和减速距离,达到避免出现小车发生意外碰撞的情况。同时考虑到红外设备自身可能会发生故障,可以在车体前端设置防撞护栏,如果发生碰撞就会触发报警装置,在一定程度上能够起到缓冲作用。红外线与机械双重避障的设计可以更加实时精确地检测出障碍物,并及时采取避障策略。车体侧方设有紧急停车开关,任何时刻按下开关,车辆就会立即停止动作。在AGV作业的过程中,红外传感器会通过闪光、声响的形式提醒现场操作人员。
如果控制中心因操作不当或者突发情况而断电,车辆可以实时检测控制信号,实现自动停车,防止小车因偏离路线而发生碰撞。
3 系统测试
3.1 导引定位系统测试
首先使用单个感应线圈在电磁场中进行检测。测得单个感应线圈在一定角度、偏移位移下的感应电动势,并对得到的感应电动势数据进行一维插值[12],将其与理想的感应电动势进行对比,从而验证系统的可靠性。前向角度分别为 0 °、30 °以及60 °时感应线圈的感应电动势如图9~图11所示。
在不同偏移状态下对双线圈电磁导引小车进行试验测定,将实验值与理想值进行对比,对比结果见表1,表1中e1、e2分别为左右两线圈的感应电动势,θ为AGV前向角度,x是AGV的偏移位移。
受测量仪器的精度以及人为误差等因素的限制,虽然单线圈的试验结果与理想曲线有偏差,但是它们的趋势基本是一样。总得来说,该文所设计的电磁导引系统能达到很好的导引定位的效果,前向角度偏差和水平偏移位移的误差都保持在1个较低的水平。
3.2 低频信号源测试
该文采用的DDS芯片为AD9834,其输出频率公式[12]如公式(1)所示。

在测试过程中,选取输出信号频率f为1000 Hz,并测量该频率的稳定性,利用5位半数字万用表对实际产生的输出信号频率进行测量,测量间隔时间为10 min,测量次数为25次,测量数据见表2。
再对输出信号的电流电压进行测试,其期望值分别为0.1 A、2 V,实际测得的输出电流、电压值记录见表3。
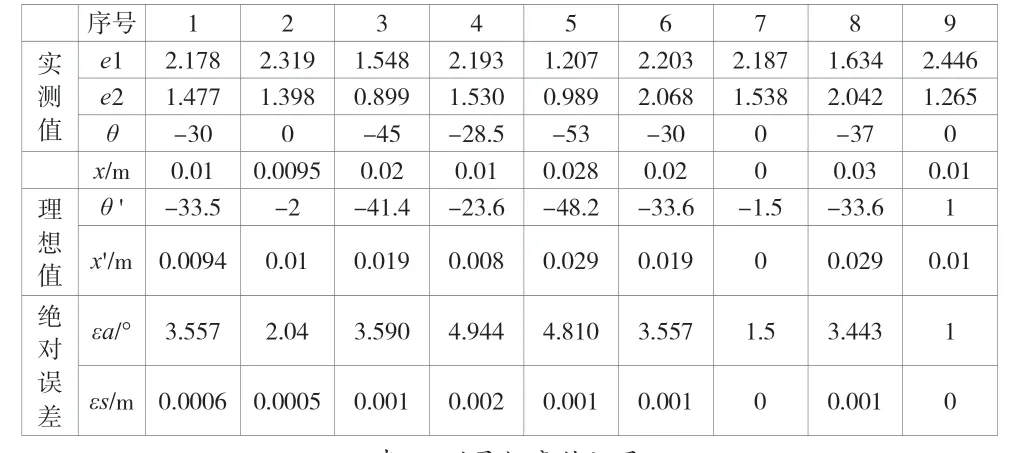
表1 不同状态时的试验测定与误差计算
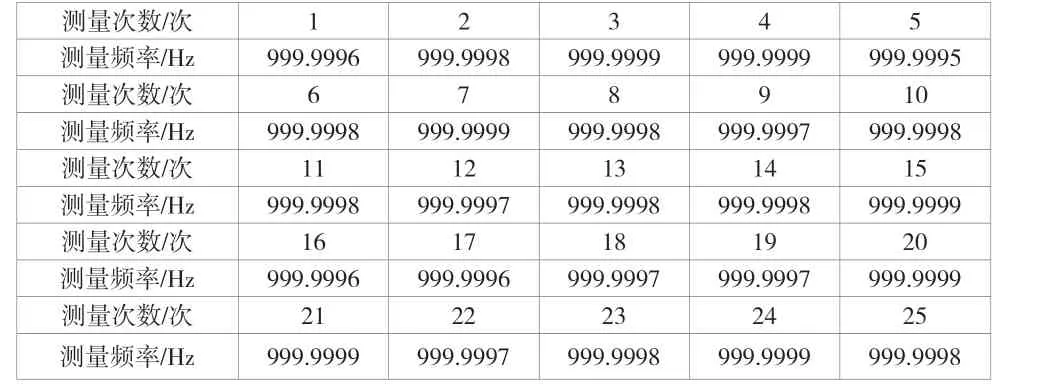
表2 测量频率值记录
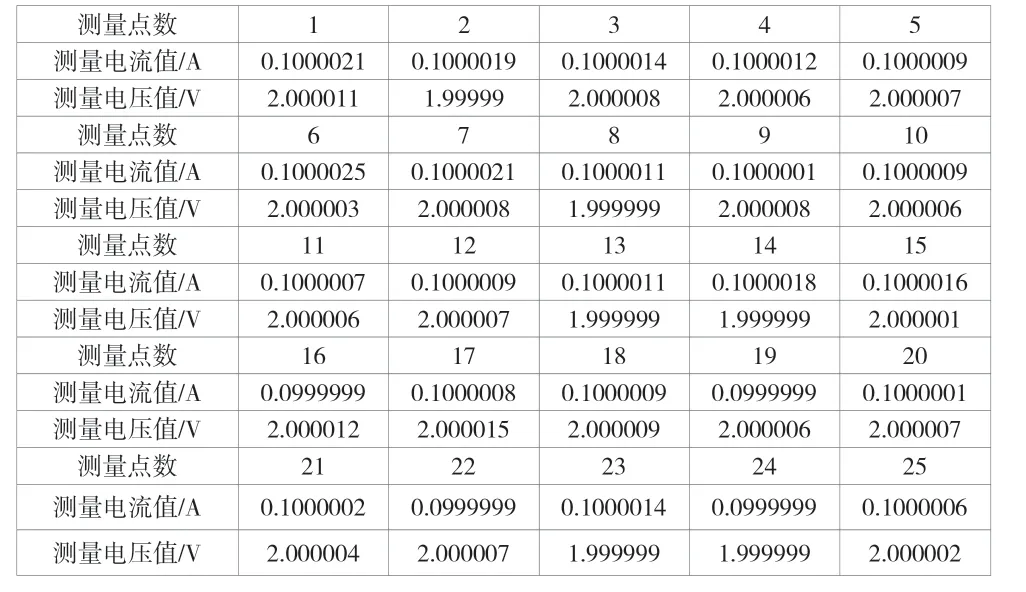
表3 输出电流、电压值的测量记录
4 结语
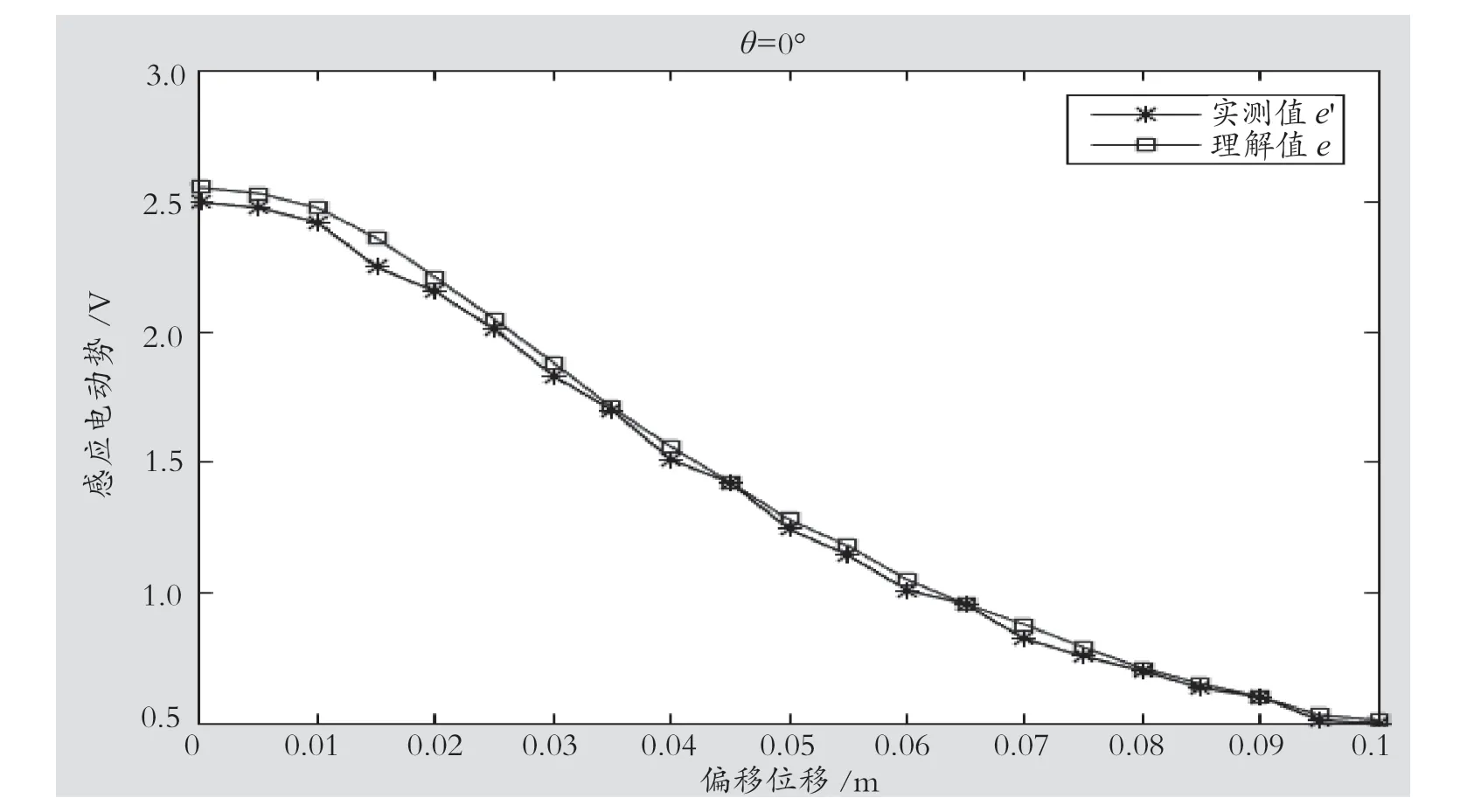
图9 θ=0 °的一维插值曲线
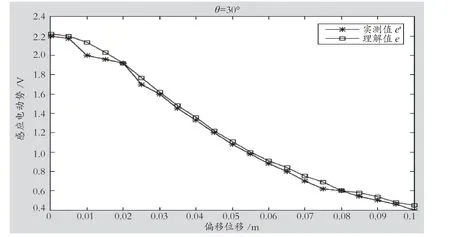
图10 θ=30 °的一维插值曲线
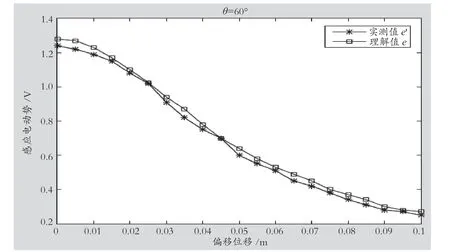
图11 θ =60 °的一维插值曲线
该文针对国内AGV导航技术落后及电磁导航应用的局限性设计了结合电磁导引与RFID定位的AGV混合导引系统,该系统在地下预埋电磁线,通过电磁线与RFID的定位配合,选择3种路径导航方法进行驱动控制。系统极大地简化了AGV控制器的硬件结构,同时为了保证系统的精度及可靠性,该文对AGV硬件电路及导航信号源进行了多级的信号处理设计。软件系统实现了便捷的人机交互、高效的无线通信和快速的数据处理,安全系统的开发设计实现了四级保护,进一步保障了AGV的运行安全。AGV混合导引系统具有较高的精度和稳定性,在导航、定位和路径规划上实现了对技术的突破,将有效推动现代物流的进一步发展。
