拆弹机器人运动机构的创新设计*
2021-05-25周思全占向辉
周思全,占向辉
(吉林大学珠海学院,广东 珠海519041)
目前中国的机器人的产业正在蓬勃发展,相对应也扩大了全球机器人的市场规模,特种、服务机器人增速较稳定。而本文讲述的拆弹机器人因能在许多环境下,通过防爆专家或者专业人士的操控和指挥排除危险或拆除炸弹,极大地保护了人身安全和人民的生命财产安全。但是,对于普通的拆弹机器人来说,一般的移动轮机构在转弯时都需要一定旋转半径,在窄小的空间里一般不能水平横向移动,这在一定程度上限制了轮式机器人的使用。但是麦克纳姆轮拆弹机器人可在原地移动任何角度,身体转动非常顺畅,可沿着水平方向所有的连续路线移动,成为移动机构中的发展趋势。由于拆弹机器人需要精准多方位的移动,因此麦克纳姆轮全方位轮式移动能够较好解决这一问题。
本文描述的麦克纳姆轮小车主要改进是完全抛弃了传统小车的驱动轮,并使用了四轮驱动的麦克纳姆轮。与普通的小车相比,它具有灵活的转向、动力、稳定性等优势。由于道路路段复杂,尤其面对狭窄的道路时,普通小车无法通过,而本文讲述的拆弹机器车就可以解决这种问题,小车可以在复杂的路段使用平移方法转弯,从而大大减少了使用时间。由于常规车身在涉险路段或急转弯时不稳定,四轮驱动功能能够克服急转弯和障碍物,从而大大提高小车的行驶稳定性,大大改善小车的运动。它更适合应用于军事,并且很可能在以后应用于灾难救援中。
1 麦克纳姆轮运动仿真建立
1.1 麦克纳姆轮参数化模型
麦克纳姆轮的车轮是可以全方位移动的,它的组成部分主要是轮毂和辊子。首先对小麦轮的安装尺寸和轮毂作用进行了整体设置,确定了成型小麦轮所需的参数。麦轮宽是影响麦轮质量的最重要参数之一,同时要设置轴与轮毂之间的固定角度为45°。通过设置麦轮的参数:车轮尺寸、轮宽、轮毂厚度、辊子轴个数、辊子轴直径以及长度,采用UGNX10.0 软件三维建模并装配组装成麦轮的参数化模型,其结构如图1 所示。
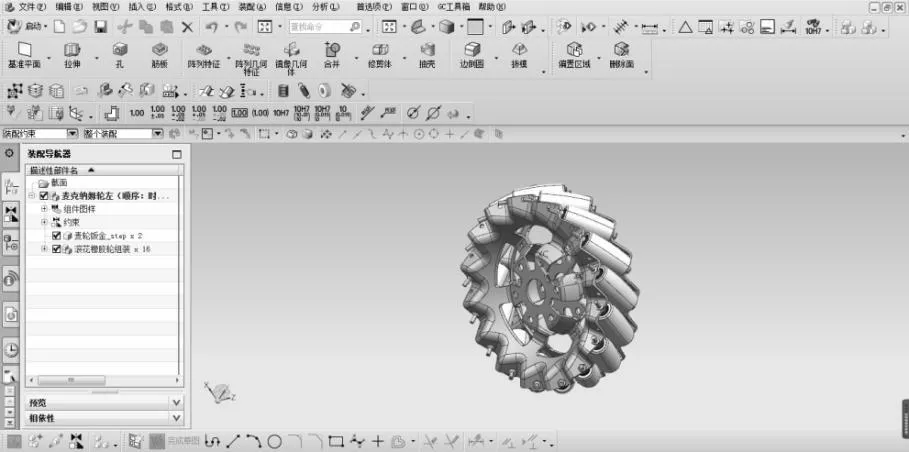
图1 麦克纳姆轮UG 三维建模
1.2 机器人虚拟样机建模
除了设计麦克纳姆轮的结构,在原有的基础上设计建模并且装配了机械手,打造拆弹机器人更加真实的模样,最终建模结果如图2 所示。
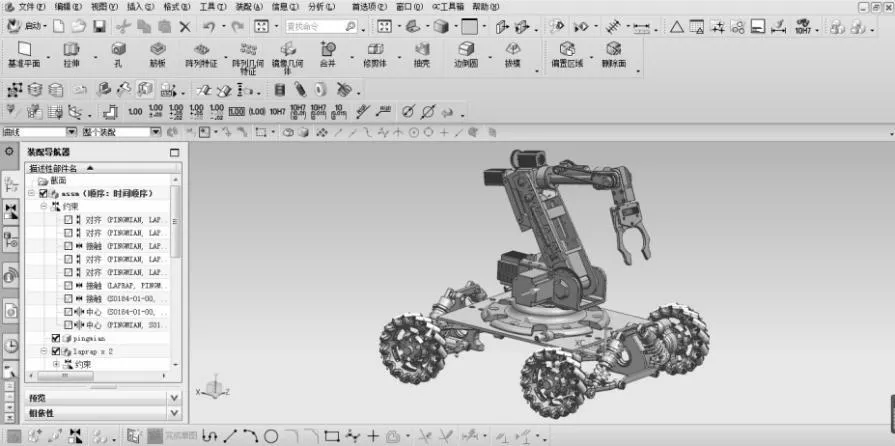
图2 虚拟样机的建模
整个拆弹机器人虚拟样机的结构包括4 个麦克纳姆轮、4 个独立悬挂系统、1 个机械手。麦克纳姆轮可以非常灵活地运动,可沿平面上任意连续轨迹走到要求的位置;在不平整的路面,独立悬挂系统提高了以麦克纳姆轮为底盘的机器人的稳定性;机械手的地盘可以进行360°转动,连杆部分可以实现多角度弯曲调试,以精确地抓取目标物件。
整个机器人的运动方案主要是将麦克纳姆轮的多维度运动与机械手配合,让机器人顺利到达目的地,顺利拆除目标。
2 机器人虚拟样机的运动仿真
对于机器人虚拟样机的运动仿真,主要是对4 个麦克纳姆轮的不同状态进行仿真并加以分析。在整个设计过程中,使用西门子UG NX10.0 软件进行运动仿真,使设计过程的尺寸和结构关联,提高三维设计的效率。
2.1 第一种状态
当4 个麦轮想要执行向前或向后运动时,小车可以实现向前或向后运动。
仿真方案:为探讨辊子在驱动轮匀速条件下的运动情况,通过NX10.0 运动仿真模块,给予驱动轮一个恒定的转速,研究其对辊子的速度及加速度的影响。
运动副:添加一个以车身为基轴的旋转副,并为其添加一个恒定的速度,再为每一个单独的辊子添加一个相对于驱动轮的旋转副,使其可以相对于驱动轮自转,然后为辊子与地面添加3D 接触,附上合理的摩擦力和重力。
结果:导出最终分析结果,如图3 所示。驱动轮在匀速条件下,辊子做匀速运动,由于每个驱动轮上有16 个辊子,计算得出每个辊子接触地面角度为22.5°,所以速度和位移曲线会呈现周期性变化,同时加速度为0,符合预期对其运动仿真的要求。
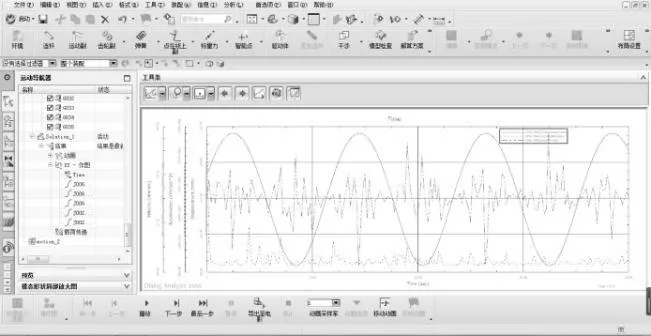
图3 小车辊子平移加速度、速度、位移分析结果
2.2 第二种状态
当小车行驶到直角拐弯时,路宽略大于车长,而普通小车几乎无法转弯,而汽麦克纳姆轮可以通过自身的优势直接向右行驶顺利通过复杂路段。
仿真方案:为探讨辊子在驱动轮加速条件下的运动情况,通过NX10.0 运动仿真模块,给予驱动轮1、3 一个逆时针转向的加速度、给予驱动轮2、4 一个顺时针的加速度,给予驱动轮一个恒定的加速度,研究其对辊子的速度及加速度的影响。
运动副:对驱动轮整体添加一个以车身为基轴的旋转副,并为其添加一个加速度,再为每一个单独的辊子添加一个相对于驱动轮的旋转副,使其可以相对于驱动轮自转,然后为辊子与地面添加3D 接触,附上合理的摩擦力和重力。
结果:导出最终分析结果,如图4 所示。驱动轮在加速条件下,加速度恒定,每个辊子的速度越来越大,单个辊子接触的地面的周期越来越小,并且加速度也在不断增加。驱动轮1、3 和驱动轮2、4 的转向和转速不同,小车可实现向右平移,符合预期对其运动仿真的要求。
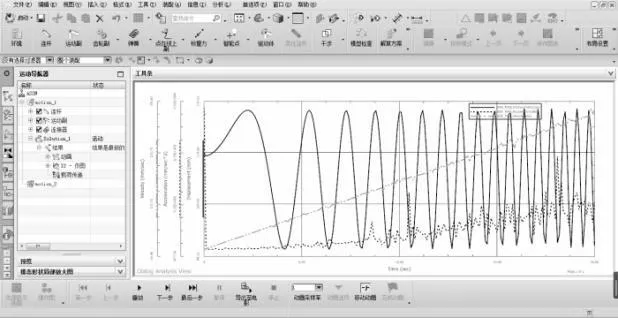
图4 小车辊子平移加速度、速度、位移分析结果
3 结论
本方案设计了基于麦克纳姆轮的拆弹机器人,用UG NX 软件制作出来数学模型然后进行装配,并且做了运动学仿真,在各种仿真情况下都能符合人们的要求。
