城轨列车自动驾驶舒适性算法研究与仿真
2021-05-19门进博
门进博,车 军
(兰州交通大学,甘肃 兰州730070)
0 引言
自动驾驶(ATO)系统利用车载设备实现对列车牵引、制动的控制,使列车经常处于最佳运行状态,提高乘客的舒适度和列车准点率,节约能源。因此,研究如何优化自动驾驶算法对于提升ATO的性能至关重要[1]。
在上下班高峰期,城市轨道列车的客流量剧增,受列车加减速,列车振动等影响,使乘客站立不稳,甚至产生不舒服感,影响乘坐舒适性[2]。ATO对处于制动状态下的列车施加牵引制动,由于列车响应牵引制动延时过长,也会造成较大的冲击率[3]。
电子通信技术的发展使铁路运营和管理产生深刻变革,列车运营和管理的智能化、信息化已成为铁路发展的新方向[4]。
为提升城轨列车舒适性,本论述主要研究两方面内容。
(1)对列车运行的目标曲线进行设计,分析对舒适性的影响,找出最优设计。
(2)采用PID算法,模糊PID等算法对其目标曲线进行跟踪,对比不同算法之间的差异。
采用一个二阶传递函数来描述列车模型,通过对实验数据进行辨识,其传递函数可由(1)式表示[5]。
1 舒适性评价指标
影响列车舒适度的因素有很多,主要有车内噪声、温度、压力、异臭味、厕所设施、振动等[3]。国外的乘坐舒适性评价标准研究已经比较成熟,提出了很多乘坐舒适性的评价标准,如国际铁路联盟的UIC513标准、德国的Sperling标准、国际标准化组织的ISO2631标准等[6]。国内有很多学者利用UIC513标准研究了如何评价城市轨道交通列车的乘坐舒适度,UIC513舒适度利用列车横向、纵向和垂向3个方向加速度进行舒适度评价[7-9],Sperling平稳性指标主要对车辆运行的横向和垂向振动加速度进行综合评价[10],IS02631标准量化了人体所受振动频率在1~80 Hz范围内的振动暴露极限值。
从ATO系统的角度而言,为保证乘客的舒适性,列车的加速度不应大于1.52 m/s2[10]。TB/T 2543-1995《旅客列车纵向冲动评定方法》指出:可利用列车冲动的加速度变化率来评价列车司机操作的平稳性,以此为基础,在此采用列车纵向加速度变化率(即冲击率)作为评价高速ATO系统舒适度的指标[12]。分析表明,加速度的变化会导致舒适度变差。加速度变化率,即冲击率。冲击率越大,则舒适度越差。冲击率表达公式为:

式中J为冲击率,a为加速度,t为时间。高速列车ATO系统的舒适性指标:启动和停车阶段的冲击率不大于0.5 m/s3,其他阶段不大于0.4 m/s3。
2 列车运行目标曲线设计
为了提升城轨列车的乘坐舒适性,设置符合舒适性要求的列车运行目标曲线是前提条件。
通过分析,列车运行有两个典型的阶段:速度调整阶段和恒速运行阶段。恒速运行阶段,加速度等于零,故满足舒适性要求;然而,速度调整阶段肯定会伴随着合外力加速度的变化,加速度的变化及其加速度本身是影响舒适性的关键因素。因此,本论述主要对列车启动阶段的目标曲线进行设计。
ATO对列车调速时,不能立即对列车施加大的牵引力,会严重影响乘坐舒适性,因此,应该逐渐增加牵引级位,以降低冲击率。在列车操作的过程中,达到期望的目标速度后,也不能立即撤销牵引力[13]。因而在启动阶段应该采取牵引力逐渐增大,然后逐渐减小的方式,既增加了列车的乘坐舒适性,也节约了能源。
考虑到列车车辆间的纵向冲击,为舒适性参数设置一定的裕度,启动阶段冲击率最大值为0.4 m/s3,加速度最大值为1.2 m/s2。为了减小对自动驾驶系统的快速性的影响,列车首先以0.4 m/s3的冲击率,使列车加速度线性上升,加速度达到1.2 m/s2时使冲击率降为零;然后以1.2 m/s2的加速度使速度线性上升;最后以-0.4 m/s3的冲击率,使列车加速度线性下降至零,列车速度达到目标速度,启动阶段完成。
以启动阶段的目标速度为60 km/h为目标进行设计,列车的冲击率、加速度、速度和运行距离随速度变化曲线如图1所示。

图1 启动阶段冲击率、加速度、速度和运行距离随速度变化规律
受线路特性的影响,司机在操纵列车时,使列车的速度保持在限速范围之内,以免触发ATO使列车制动。因此,对列车运行目标曲线的设计转化为对速度随运行距离变化规律的设计。利用速度和距离随时间变化规律,通过计算及其数据拟合的方式获得的列车启动阶段的变化规律如表所示,列车启动阶段的目标速度随行驶距离的变化规律见表1所列。当列车达到目标速度时,列车进入恒速运行状态,本论述所采用的列车运行目标曲线如图2所示。
3 控制器设计及其仿真
3.1 传统PID控制器
传统PID控制利用比例、积分和微分作用对被控对象进行调节,使其按照控制要求进行快速、准确和平稳的响应[14]。根据经验确立比例、积分和微分参数分别为16、10和38,PID控制系统如图3所示。

表1 列车启动阶段速度随运行距离变化的规律

图2 列车运行目标曲线

图3 PID控制系统
运用MATLAB软件的SIMULINK模块完成PID控制器以及基于PID控制器的列车速度控制模型的构建,通过此模型进行列车平稳性仿真,基于PID控制器的列车速度控制模型如图4所示。

图4 基于PID控制器的列车速度控制模型
3.2 模糊PID控制器设计
模糊PID控制器由PID控制器和模糊控制器两部分组成,具有很好的鲁棒性和稳定性[15]。
模糊PID控制器的输入变量为偏差e和偏差变化率ec。输出变量为PID控制器的比例系ΔKP、积分系数ΔKI,和微分系数ΔKD。输入变量e的论域范围为[-0.3,0.3],ec的论域范围为[-0.1,0.1],输出变量的论域范围均为[-6,6];输入输出变量的模糊子集为{负大,负中,负小,零,正小,正中,正大},也可表示为{NB,NM,NS,ZO,PS,PM,PB},其隶属度函数均为三角形。模糊PID控制系统如图5所示,基于模糊PID控制器的列车速度控制模型如图6所示。

图5 模糊PID控制系统
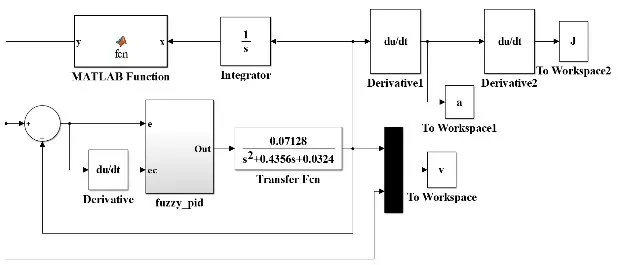
图6 基于模糊PID控制器的列车速度控制模型
3.3 仿真结果生成
根据图4和图6所创建的模型进行仿真,以便于下一步对与列车舒适性相关度指标进行分析。PID控制器作用下的列车速度跟踪情况如图7所示,模糊PID控制器对列车速度控制的结果进行对比,两种控制方法作用下的冲击率和加速度随时间的变化情况分别如图9、10所示。

图7 PID控制器作用下的列车运行v-t目标曲线和跟踪曲线图

图8 模糊PID控制器作用下的列车运行v-t目标曲线和跟踪曲线图

图9 列车冲击率随时间变化曲线
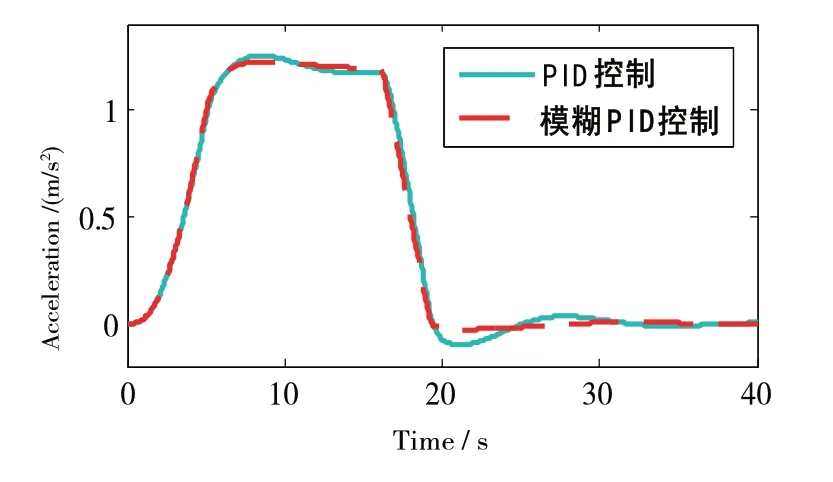
图10 列车加速度随时间变化曲线
结合图7和图8可知,在PID控制器和模糊PID控制器作用下,列车对目标速度曲线的跟踪特性理想,然而在模糊PID控制作用下,速度的超调量相对较小。从图9可知,两种控制作用下列车运行过程中的冲击率均符合舒适性的要求,然而PID控制条件下,冲击率相对于设定值0.4 m/s3出现了10%的超调量,模糊PID完全符合设定值的要求,没有出现超调现象。从图10可知,两种控制作用下列车运行过程中的加速度均符合舒适性的要求,但是加速度相对于设定值1.2 m/s2出现了不大于5%的超调量,然而模糊PID控制的超调量更小。从图9和图10也可以看出,在从启动阶段进入恒速运行阶段,两种控制器均完全符合舒适性的要求。
4 结论
本论述借助MATLAB系统仿真软件,针对城轨列车舒适性这一性能指标,设计了符合列车运行舒适性的目标曲线,并搭建出PID控制系统和模糊PID控制系统跟踪列车速度的模型。通过对跟踪曲线的进行对比、分析,得出以下结论:在列车进入恒速运行阶段,列车的舒适性完全符合标准要求;然而在列车启动加速阶段,相比传统PID控制,模糊PID在跟踪列车速度方面有更强的稳定性,不仅其加速度符合舒适性要求,而且冲击率也符合设计要求,在改善列车舒适性方面,模糊PID变现出了更大的优越性。
