一种三维激光点云中建筑物立面分割方法
2021-05-18李玉兵
李玉兵
(济南市房产测绘研究院,济南 250002)
0 引言
随着智慧城市、智慧住建的需求不断迫切,如何对建筑物进行精细化三维重建是当下研究的热点之一[1-2]。三维激光扫描技术作为一种新型的测量技术,具有数据获取速度快、精度高、非接触等优势,已被广泛地应用于城市规划、智慧交通等方面[3-4]。三维激光扫描技术已成为快速获取城市建筑三维信息的重要途径,但其获取的点云数据具有无序、离散、海量等特点,因此在三维激光扫描数据中快速、准确地分割出建筑物立面点云是当前的研究热点。
针对建筑物点云分割,许多学者已经开展了大量的研究。Bauer等[5]提出的RANSAC(random sample consensus)算法通过随机抽样消除噪声的影响,构建一个由局内点组成的子集,从而将各个具有面特征的建筑物立面分割开来。随后文献[6-8]对RANSAC点云分割方法进行改进,取得了较好的效果。但该类方法在分割过程中过于依赖阈值,人为设定阈值会产生过分割或欠分割的情况。文献[9-10]利用Hough变换对建筑物立面实现了分割,但Hough变换算法在分割过程中易产生伪平面造成精度损失,同时计算量大,效率低。文献[11-12]从建筑物点云的结构入手,依据点坐标、法向量和表面粗糙度等属性制定生长规则完成不同立面的生长分割。这类区域生长法只需要少量种子点和规则就能实现立面分割,但种子点的选择以及规则的设定会直接影响分割结果[13]。
针对三维激光点云数据中建筑物立面遮挡较多、周围噪声干扰多、易漏分割、过度分割等问题,本文提出了一种顾及立面几何特征的建筑物分割方法。该方法深入分析建筑物立面激光点云在二维及三维空间中的几何形态,根据立面几何形状确定生长方向,最后通过聚类生长完成立面分割。
1 研究方法
1.1 建筑物立面点云粗分割
点云数据中含有各种各样的地物类别。从研究对象角度来说,点云中的地物类别可以分为建筑物与其他地物2大类,如表1所示。建筑物立面点云与其他地物最主要的区别有2个方面:三维空间和二维投影平面。
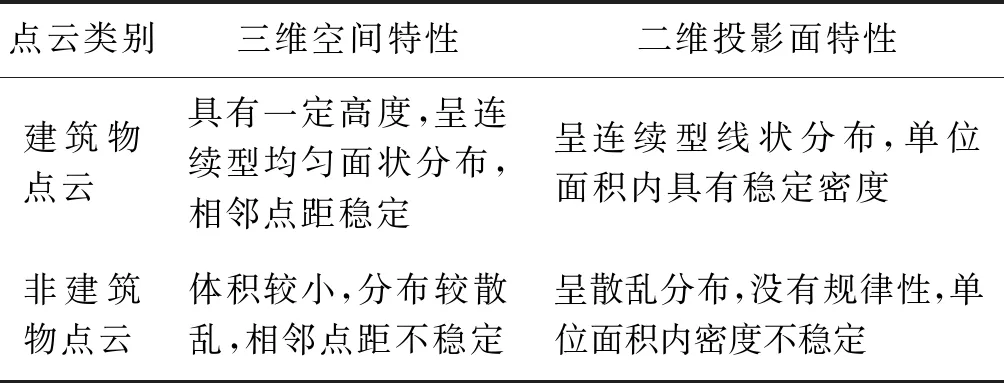
表1 建筑物与非建筑物空间形态对比
按照空间分布差异,将建筑物立面划分为建筑物主体立面和阳台小立面2个部分。首先,对建筑物主体立面分割:创建建筑物的二维格网与三维格网,以格网内点云特征作为立面分割的依据,通过确定种子格网进行立面格网区域生长。本文将立面种子格网分为平直立面格网和拱形弯曲立面格网。

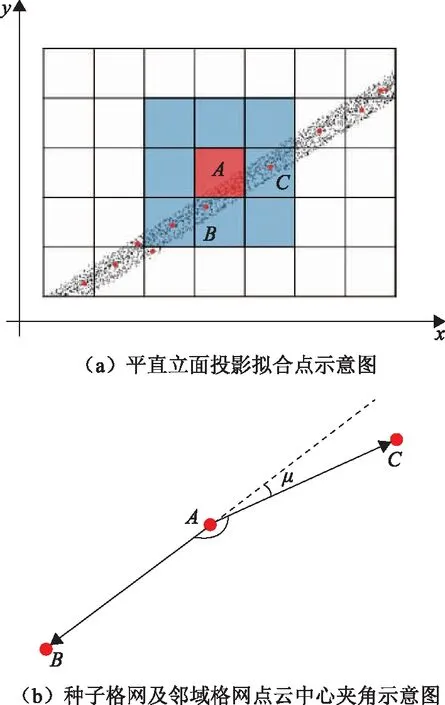
图1 平直立面投影拟合点及中心格网夹角示意图
确定种子格网后,选择种子格网的中心坐标(x,y)作为初步拟合点。本文采用DBSCAN算法对初步拟合点进行去噪,获得最终拟合点。确定拟合点后,根据拟合点在XOY平面内的分布,采用最小二乘法进行投影线拟合,确定生长方向,将建筑物立面点云以种子拟合点为中心沿生长方向进行约束聚类生长,完成对立面的粗分割,如图2所示。
平直立面拟合如式(1)所示。
(1)

拱形弯曲立面拟合如式(2)所示。
(2)


图2 立面约束聚类生长示意图
完成建筑物主立面点云的粗分割后,部分建筑物含有外部阳台,也需要对该建筑物进行阳台立面分割。由于主立面点云已分割完毕,因此剩下的为阳台小型立面,其分割与主立面分割过程基本相同,只是在确定种子格网的规则上略有区别。相对于建筑物主体立面,阳台立面点云较少,高差较小,因此不需要添加高差和密度2个约束条件,只需要检查种子格网内点云中心到2个邻域格网内点云中心的向量是否满足共线条件,然后按照立面约束进行区域生长。
1.2 建筑物立面点云精分割
经粗分割后的建筑物平直立面点云周围仍存在一些高密度噪点,如扫描仪采集到的窗帘、空调机等。这些噪声点的特点与主立面点云的特点相似,都具有一定的高度和密度,在粗分割时往往会被判断为立面点云。为此,应对粗分割后的建筑物各个立面进行精细化分割。
针对粗分割后仍存在较多高密度噪点问题,本文采用建筑物分层立面精分割策略。首先,对粗分割后的点云根据划分的三维格网进行分层;然后,逐层进行最佳拟合平面探测,根据先验知识设置平面拟合阈值,从粗分割后的点云中快速、精细地分割出建筑物平直立面,剔除噪声点。对分层后的各层建筑物立面分割完毕后,需要将上下层属于同一主立面的点云合并。由于各层阳台是分开独立的,因此,阳台立面并不需要合并。一般情况下,建筑物为立面垂直于地面的规则目标。因此,各层主立面上下各层满足一一对应关系,由此设定的合并策略为逐层、逐立面合并,具体如下。
1)由于花草树木的遮挡,造成建筑物立面点云存在一定程度的缺失。因此,首先对点云个数进行统计,找出各层建筑物点云完整率最高的一层作为基准层。
2)如图3所示,假定红色线为基准层立面在XOY面上的投影拟合线,蓝色线为另一层立面点云的投影拟合线,2层在空间上是上下对应的关系,所以2条线的间距需处于一定的阈值范围内。假设图中a、b、c分别为蓝色线的2端点以及中点,则3点到基准层投影线(红色线)的距离均应小于阈值Δd。
3)对各层建筑物点云的立面按上述方法判断是否与基准层的立面为同一立面,并将属于同一立面的点云上下合并。
4)建筑物各层主立面点云合并完毕后,将未合并的各个阳台立面合并入对应的层数中,完成建筑物点云整体的分割流程。
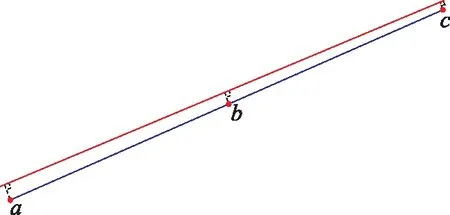
图3 相同立面合并示意图
2 实验分析
2.1 实验数据与参数
为了证明本文方法的适用性,选取2处典型建筑物点云进行立面分割。建筑物1周围存在空调外机、窗帘等非建筑物点,共672 390个点;建筑物2周围存在树木、健身器材等非建筑物点,共8 535 372个点,如图4所示。

图4 实验数据

表2 建筑物立面分割所用参数
2.2 实验结果与分析
从图5可以看出,对于弯曲立面与平直立面组成的建筑物点云,本文方法可以有效分割。图5(a)红色方框中为第2层阳台点云中的弯曲立面,显示该弯曲立面被完整地分割出来,与周围其他立面分离度较高,轮廓清晰,周围噪点较少;图5(b)内部以及外部噪声点均被去除,各个立面的分割效果良好。文献[13]中的方法,对弯曲阳台立面不能进行准确分割,部分点云被误分割为噪声点,如图6(a)中红色方框所示;部分外部噪声点被错误地分割为立面点云,如图6(b)中椭圆形框所示。从图7可以看出,本文方法对不同类型的建筑物进行分割时能够有效地分割出建筑物立面,但由于部分立面被树木遮挡严重,点云质量较差,少数立面存在漏分割现象。
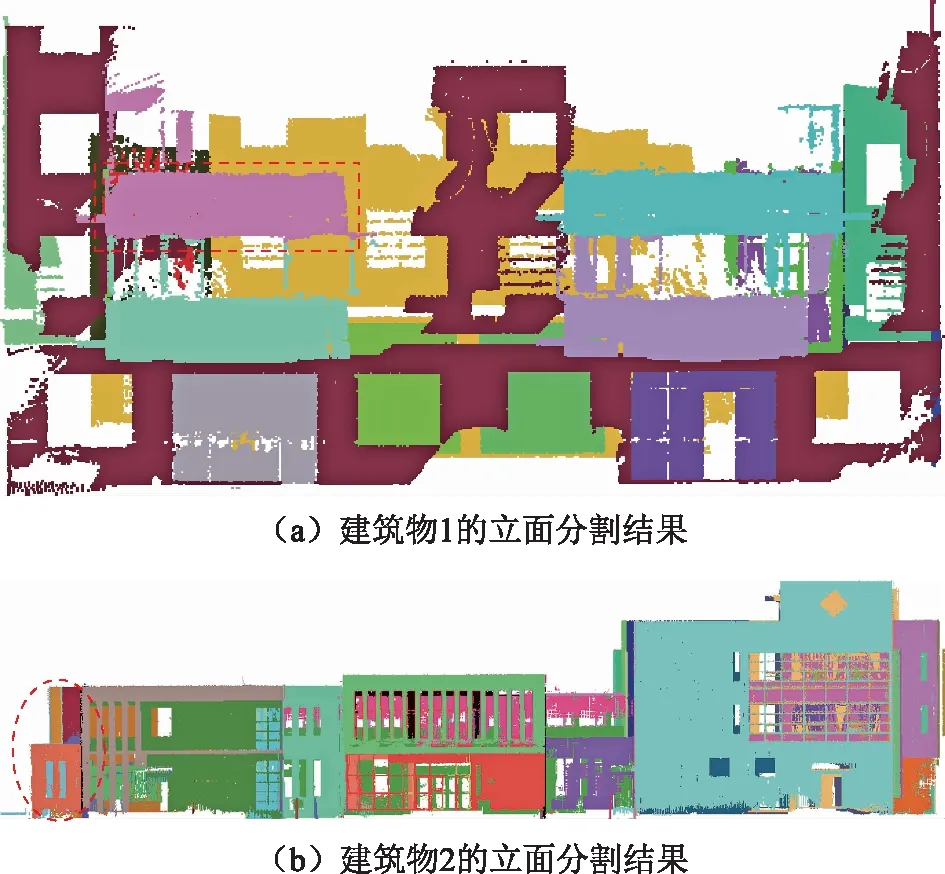
图5 本文算法实验结果
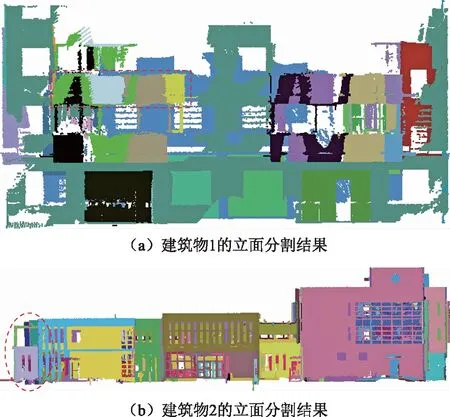
图6 文献[13]算法实验结果
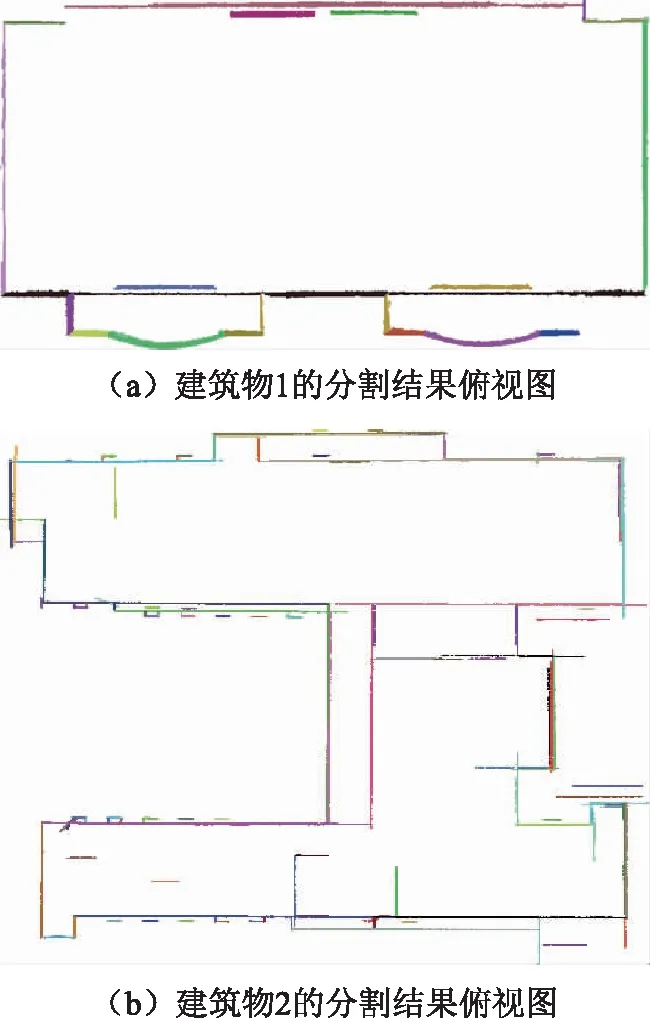
图7 本文算法实验结果俯视图
为进一步说明本文算法的准确性,对实验数据分割出的立面面片数量进行统计,通过人工交互提取实验数据立面数量,同时采用文献[13]的方法进行提取,通过比较立面分割的准确率(accuracy rate,AR),对建筑物立面提取结果进行评价。AR定义为:各方法提取的立面数量/人工交互识别的立面数量×100%。对比结果如表3所示。本文算法提取的建筑物1的立面分割准确率为95.00%,建筑物2的立面分割准确率为94.59%;文献[13]算法提取的建筑物1的立面分割准确率为75.00%,建筑物2的立面分割准确率为83.78%。文献[13]的方法无法区分处于邻近同一水平位置的阳台平直立面和卷帘门点云,因而会造成漏分,且有部分窗帘噪点存在,对一些因遮挡造成面积较小的立面也不能有效识别,故而本文的方法准确率高。
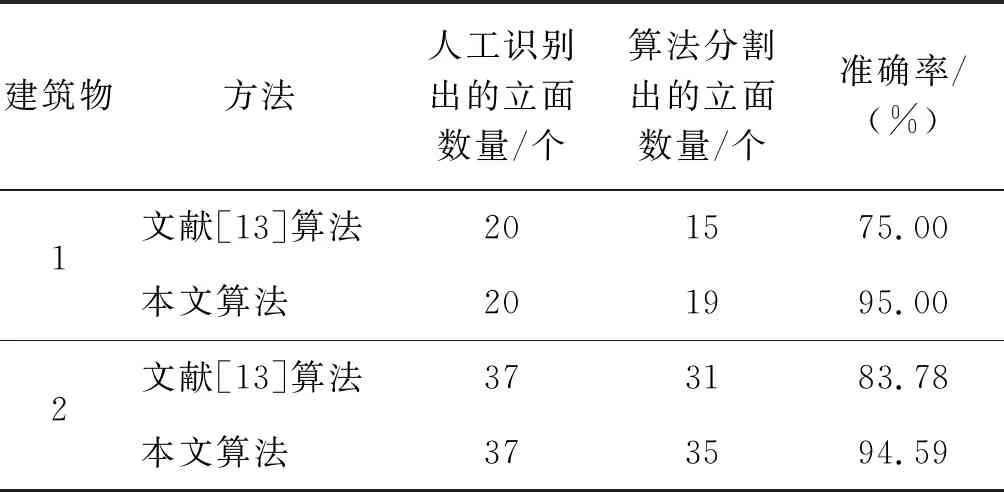
表3 2种分割结果定量分析
3 结束语
本文充分挖掘了三维激光点云中建筑物点云在二维及三维空间中的形状特性,提出了一种立面特征规则约束的建筑物立面分割方法。首先,根据立面特征选取建筑物立面拟合种子格网,确立初始拟合点;然后,依据立面投影特征约束生长方向,完成立面粗分割;最后,对粗分割立面进行精细化处理,完成建筑物立面精分割。研究结果表明,本文方法能有效地分割出建筑物主体立面与阳台立面,同时对建筑物中平直立面与拱形弯曲立面的分割质量较高,具有较强的适用性和鲁棒性。