外骨骼助行机器人连续步态规划分析
2021-05-18桓茜,王伟
桓 茜,王 伟
(1.陕西工业职业技术学院航空工程学院,陕西 咸阳 712000)(2.西安工业大学光电工程学院,陕西 西安 710021)
外骨骼助行机器人(以下简称外骨骼)属于一种双足仿人机器人动力系统,穿戴在人体下肢上面,在时间、动作上与人体下肢实现同步协调工作[1-3]。轨迹规划一直属于外骨骼机器人研究热点问题,稳定合理的步态轨迹是外骨骼系统辅助人体运动的基本前提[4]。
1 ZMP稳定判据方法
1.1 人体步态行走的稳定性分析
下肢的动态行走是一个复杂的运动过程,正常行走时人体会产生向前的惯性力[5],如图1所示,外骨骼工作过程中,如果重心始终投影在足部脚掌范围内,则人体的步态过程是连续、稳定的[6],否则人体步态过程是不稳定的。

图1 人体动态行走重心轨迹
1.2 基于ZMP的稳定性分析
为了让外骨骼的动态重心投影在有效支撑面内,引入零力矩点(zero moment point,ZMP)理论来研究步态的稳定性,要求ZMP点位于足部的有效支撑区域[7]。
外骨骼可理解为是k个连杆的空间质心系,第j个质点Mj在空间的状态如图2所示,P点为ZMP点(xzmp,yzmp,0),经推导可知,下肢外骨骼动态行走的重心轨迹方程为[8-9]:
(1)
(2)

图2 质点Mj的空间状态

当下肢行走的速度非常慢或加速度为0时,可忽略下肢各关节惯性力的作用,则式(1)变为静态行走时的轨迹方程。
2 外骨骼的步态轨迹规划
人体下肢外骨骼的运动过程复杂,常用的步态规划方法是五点规划法[10]。将下肢运动过程划分为5个姿态,如图3所示。

图3 五点规划法
图中:t0时刻表示步行开始;(t0+t1)时刻单腿完全支撑,此时脚掌与地面的夹角为θs;(t0+t2)时刻摆动腿与地面距离最大;t0到(t0+t3)时刻表示一个完整的单腿摆动时间段,摆动腿脚后跟开始着地,此时脚掌与地面的夹角为θf;(t0+t3+t4)时刻脚后跟着地。
2.1 连续行走踝关节的步态规划
根据外骨骼机器人的逆运动学,已知髋关节和踝关节的坐标值,可求解出下肢各关节与垂直轴的角度,因此仅对踝关节和髋关节的步态进行计算。
假设在第n次下肢行走过程中,步长为s,摆动腿踝关节与地面的夹角为θ(t),如图3所示,第一个点,θ(t)=0;第二个点,θ(t)=θs;第三个点,即脚部抬至最高点时刻,θ(t)=0;在第四个点,θ(t)=θf;在第五点,双脚处于完全触地阶段,θ(t)=0,如式(3)所示,其中t3为单腿摆动的一个完整周期。
(3)
外骨骼协同人体行走跨过地面上的阻碍时,定义t2时刻,踝关节与地面平行时的高度为H,踝关节到起点位置的长度为Lh,则该状态下的横坐标见式(4):
(4)
图4所示为足部触地支撑开始和支撑终止的状态[10]。踝关节到质心的距离为la;脚尖与质心的距离为lc;脚跟与质心的距离为lb。

图4 脚踝位置状态
开始时刻踝关节坐标为:
nt3+t4=ns+lc(1-cosθs)+lcsinθs
(5)
终止时刻踝关节坐标为:
nt3+t3=(n+1)s+lc(1-cosθf)+lasinθf
(6)
由式(5)和(6)可得踝关节在x轴的位姿坐标为:
(7)
则相应的踝关节在z轴的位姿坐标为:
(8)
2.2 连续行走髋关节的步态规划
髋关节的步态规划主要是研究髋关节x轴方向的位姿坐标,其z方向的位姿坐标始终为一个常量,此处不予考虑[10]。如图5所示,引入2个参数,一个表示开始进入单腿支撑时,髋关节与支撑腿之间的长度为ld;另外一个表示开始进入双腿支撑时,髋关节到支撑腿之间的长度为le。
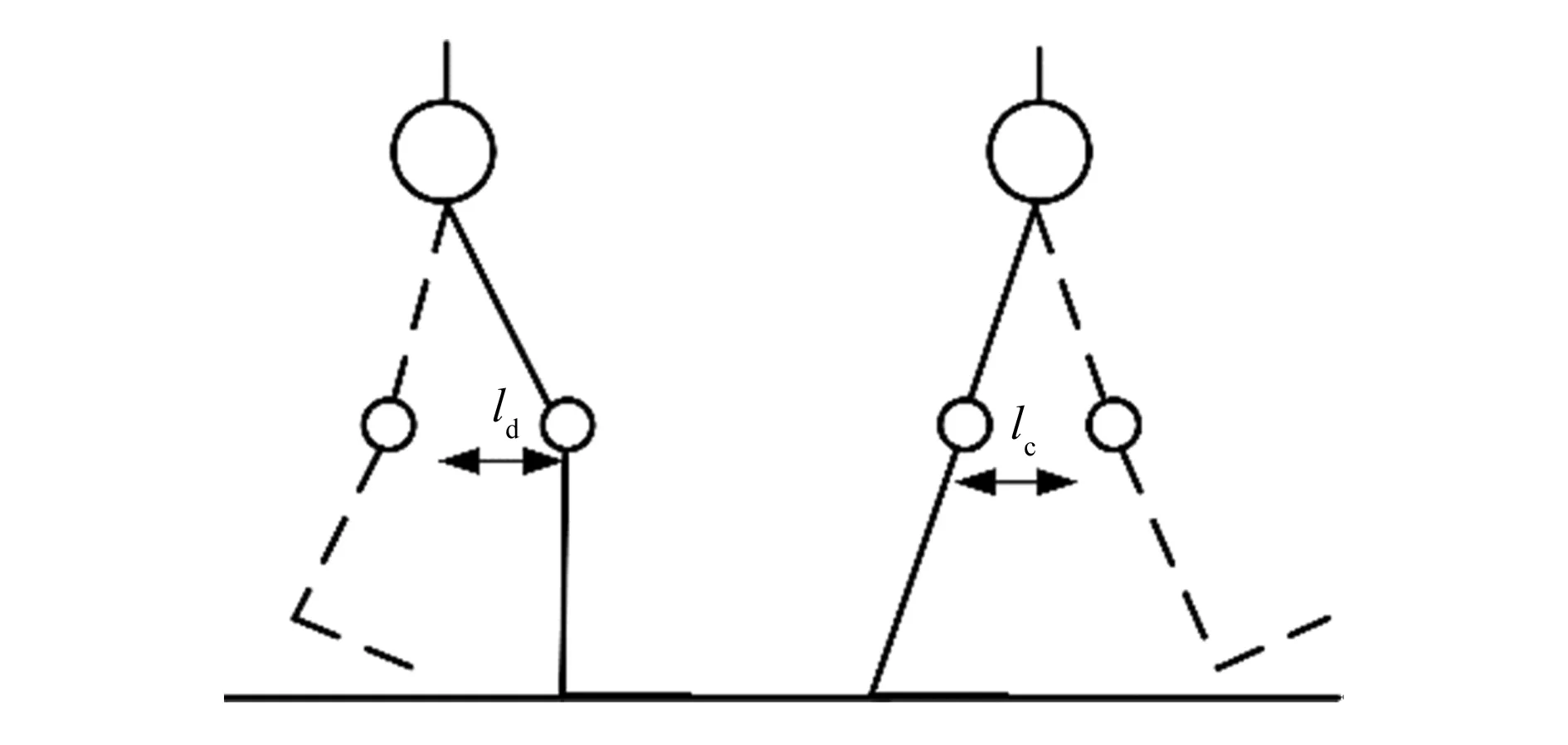
图5 单腿支撑过程
一个周期内,髋关节在x轴方向的位姿坐标为:
(9)
对于髋关节角度θ(t),可由逆运动学方程计算,详细过程不再进行叙述。
3 步态求解
人体正常行走的下肢步态参数见表1,将各个数值代入公式求解计算,定义n=0,则踝关节在x轴和z轴的参数值如下:

(10)
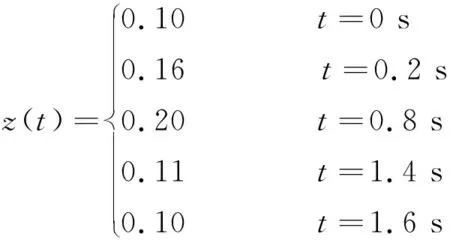
(11)

(12)
计算了5个特殊点的坐标后,通过X=csapi(x,y) 函数模块[11-12]得到如图6所示的三次样条曲线。

表1 人体下肢步态参数

图6 踝关节的步态轨迹曲线
在x轴方向髋关节的五点数值计算结果如下:

(13)
如图7所示,在MATLAB中拟合了髋关节在x轴的轨迹曲线。此外可求解出踝关节和髋关节对应的速度曲线,如图8所示。

图7 髋关节在x轴的轨迹曲线

图8 踝关节和髋关节的速度曲线
通过式(1),可求解出下肢外骨骼各个杆件的质心位置和质心加速度。
(14)
(15)
(16)
(17)
(18)
(19)
(20)
(21)
(22)
(23)
式中:a0为小腿长度;a1为大腿长度;a4为脚长[13];L为腿长,且L=a0+a1;θ1为小腿与脚面之间夹角,θ2为大腿与小腿之间的夹角,θ3为上身与大腿之间的夹角;θ4为另外一条腿的大腿与小腿之间的夹角;θ5为另外一条腿的小腿与脚面之间的夹角。
由已知动态轨迹方程,在MATLAB平台中仿真出外骨骼ZMP步态轨迹曲线,如图9所示。

图9 下肢外骨骼的ZMP轨迹曲线
一个步态过程中,外骨骼协同人体下肢左脚开始运动,则ZMP点稳定在左脚支撑区域内,当协同下肢开始迈右脚,则ZMP点逐渐向右脚支撑区域内转移,形成一条光滑且连续的ZMP曲线,说明下肢外骨骼的步态符合理想的重心轨迹曲线(图1中)的变换趋势,也说明了外骨骼机器人耦合人体下肢运动具有连续稳定性的特点。
4 结束语
下肢外骨骼机器人的步态轨迹需要同步协调人体下肢的行走运动,稳定的步态规划至关重要。零力矩点(ZMP)法是分析外骨骼系统步态稳定性的主要研究方法。本文利用MATLAB平台求解了外骨骼的踝关节和髋关节的位姿方程,同时获得了外骨骼机器人一个运动周期内的ZMP曲线,仿真结果满足下肢助行机器人步态稳定的条件。