风力发电机组偏航系统仿真设计与分析
2021-05-14高海涛
摘要:风电机组偏航系统是风机特有的机电系统结构,其稳定性是风机可靠运行的重要保障。现提出并实现了对偏航仿真系统软硬件的设计,对系统的控制策略和稳定性进行了分析研究,通过动态调试,搭建了一个符合工业现场的风电机组偏航仿真系统。
关键词:偏航系统;仿真实现;控制策略;设计分析
0 引言
偏航机构作为风电机组特有且十分关键的随动机械装置,当机舱跟踪风向变化而发生电缆缠绕时,视风机实际运行情况适时进行解缆,并及时润滑偏航机械机构。使用ADAMS、BLADED等软件对偏航系统进行建模仿真已比较成熟,但进行实物模拟仿真的还不多,本文设计的模拟仿真系统对教育培训和科研具有现实意义。
1 偏航系统模拟仿真设计要求
1.1 偏航对风
偏航系统与风机控制系统配合,通过风传感器跟踪风速、风向的变化,计算单位时间内平均风向,当风速大于某设定值时,如风向与机舱方向的夹角超过设定角度,偏航系统将执行偏航对风。为防止机组在风扰动情况下频繁动作,偏航控制系统以10 min的平均风向作为偏航条件,当满足偏航条件时执行偏航动作,让风机保持迎风状态。
1.2 风轮保护
正常发电时,制动器将偏航轴承锁定,保证风机在迎风位置工作。在出现破坏性风速时,叶片顺桨并以最快速度停机,进而让机舱偏航90°背风,以免风机受损。当机组出现紧急停机故障时,风机将切除补偿电容,风轮气动刹车,延时0.3 s后偏航制动器动作,检测到瞬时功率为负时退出,若停机时长大于20 s仍未顺桨,则机舱偏航90°背风。
1.3 扭缆保护
风机朝同一方向连续偏航,导致高压线缆过度扭绞,当扭绞程度达到扭缆保护触发值时,系统执行小风自动解缆及强制解缆程序,保证机组安全运行。在偏航的过程中,机舱顺时针或逆时针转动达到720°~1 080°时,待机组出力较小或不出力时驱动风机解缆。风机在正常发电时,风机不立即进行解缆操作。当偏航角度超过1 080°时,扭缆保护触发初级解缆,机组需停机进行解缆。若不能解缆,则当纽缆角度达到1 440°时,会触发终极解缆,纽缆开关将闭合,触发安全链而导致机组自动停机,此时需要手动解缆。
2 偏航系统硬件仿真设计与实现
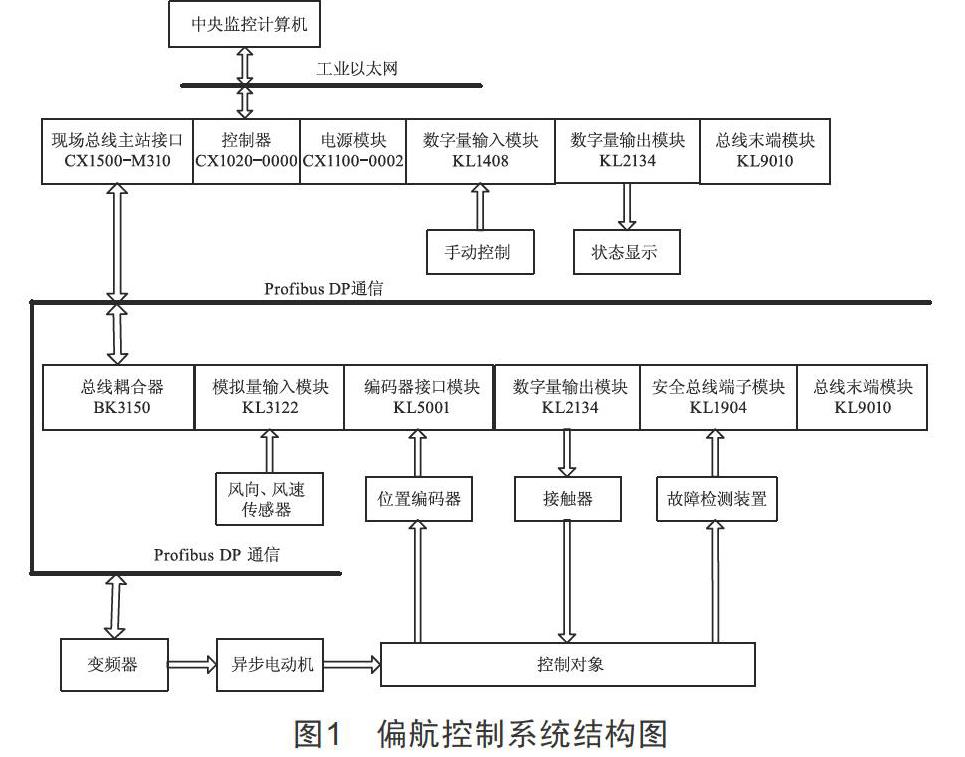
采用3台无级变速三相异步电动机(Y112M-4)、3台偏航减速器(BLD4-59-4kW),以外齿型驱动方式,在机舱转动的同时带动光电编码器转动,光电编码器实时监测机舱转动角度并传送到控制系统。装置安装采用分体式结构,用支撑结构平台模拟机舱底座和偏航轴承等驱动构件。偏航轴承及机舱模型通过一块圆形齿边的钢板进行仿真模拟,在钢板中央设轴承,轴承连接旋转编码器,其0°值对应机组主风向。偏航系统采用倍福PLC作为核心处理器,系统结构分为4级。中央监控计算机作为网络层;PROFIBUS现场总线主站接口CX1500-M310、控制器CX1020-0000、电源模块CX1100-0002、数字量输入模块KL1408、数字量输出模块KL2134、总线末端模块KL9010构成主站层;从站层包括总线耦合器BK3150、模拟量输入模块KL3122、SSI编码器接口模块KL5001、数字量输出模块KL2134、安全总线端子模块KL1904和总线末端模块KL9010;现场层由各种变频器、电动机及各控制对象组成。偏航控制系统结构如图1所示。
3 偏航系统控制程序设计
3.1 偏航控制流程及策略
(1)自动润滑。1)计算润滑停止位置。若机舱位置>0°,润滑偏航止位为机舱位置减355°;反之为机舱位置加355°。2)判断是否需要润滑。机组运行时间达到润滑设定时间时,执行润滑,若运行时间>设定时间+120 h,则必须润滑。3)判断润滑条件。风速小于8 m/s时的易损件、风速小于16 m/s时必须润滑的部件,执行自动润滑程序。4)开始自动润滑。满足润滑条件,时间置零重计,屏蔽自动解缆及自动偏航,根据机舱具体位置判断润滑时的偏航方向,计算润滑停车位置,启动偏航电机,偏航电机反馈信号后,润滑泵立即运行并开启控制阀进行自动润滑。
(2)自动偏航。连续检测气流方向变化情况,在不同的角度差值下设置不同的延时时间,按傳感器角度信号θ值执行相应动作。当5 s内θ值误差角度Δθ=15°,即-15°≤Δθ≤15°时,认为风机位于主风向而不偏航;当Δθ>25°时,将延时20 s进行偏航输出;当15°<Δθ<25°时,将延时50 s进行偏航输出;当Δθ<15°时,将延时90 s进行偏航输出,从而实现大角度快速动作,小角度精确检测动作[1]。另外,Δθ>180°表明风机相对风向标有一个向右偏离的夹角,应执行逆时针偏转;Δθ<180°表明风机相对风向标有一个向左偏离的夹角,应执行顺时针偏转。
(3)自动解缆。风向在随机变化过程中,机舱持续同向跟风可能导致高压线缆绞缠,需根据实际运行情况解缆。风向在-180°~180°变化,偏航角度在-1 080°~1 080°调节变化,在进行解缆控制时,应时刻跟踪偏航角转过的角度。例如当风向角为-10°时,需计算此时偏航角度,假设此刻偏航角为1 000°,则偏航角与风向角之差为1 010°,根据程序判断差值大于900°,因此利用差值减去1 080°,得出执行偏航角度应为-70°,由此可知风机需要执行左偏解缆。
(4)手动偏航。检测到手动偏航启停信号时,清零其他运行指令状态,读取手动信号,打开制动器,手动操作。手动偏航和自动相关程序相互独立,程序嵌套在主程序中。
3.2 偏航指令的优先级
偏航系统可以在多种指令形式下执行动作,除了上述提到的偏航和解缆外,还有背风、控制面板手动运行、机舱左右开关偏航、中控远程偏航、中控偏航锁定等指令。为避免手动偏航导致纽缆,超过设定最长偏航时间时,风机将自行停止偏航。偏航指令优先级排序:就地开关、控制面板手动、中控远程、自动侧风、自动解缆、自动对风。
4 偏航仿真系统控制策略分析
偏航控制策略有线性化、变结构、鲁棒、自适应和模糊控制。线性化控制基于比例模型,在不同输入风速下始终以最优尖速比运行,在风速变化迅速时调节相对滞后,往往仅能满足正常工况下的要求。变结构控制凭借响应速度的优势在风电领域发展较好,其对风能的扰动特性具有良好的适应能力,结构模型确定的情况下,对系统的执行速度快,反映较直接,在结构参数瞬变时,控制过程较稳定;在参量变化范围宽、随动性干扰的情况下,其能快速且直接控制偏差问题。自适应控制经传感器鲁棒控制可同时完成对若干个运行参数的调节和控制,尤其是在模型搭建过程中已有偏差存在时,可根据运行和控制器监测反馈参数及时计算,易于控制变量的增益[2]。模糊控制将成熟的理论及完美的控制方法转变为控制策略,无须精确建模,便能消除扰动,实现稳定控制的目的[3]。因风能的扰动和随机性,实际工况建模较为困难。考虑到实验室环境下条件较好,输入参数和数据便于控制,风速、风向值可采取给定的线性模式进行控制,同时为了简化装置和优化结构,采用简明且直接的线性化运行策略。当然,在需要对快速变化的风速、风向进行仿真模拟时,可采用更加智能的控制策略。
5 偏航仿真系统稳定性分析
偏航仿真系统根据预测分析与配合控制环节调整风机转向,其性能的好坏与发电及风能吸收系数Cp值关系密切,偏航过程中承受随机荷载,对偏航系统的稳定性要求较高。在本仿真装置中,偏航系统的负荷较小,近似空载运行,偏航过程中没有偏航阻尼,偏航圆盘完全由偏航电机驱动控制,由开关或电位器模拟数字和模拟量信号,控制精度不高,与设计值相比偏航误差为15°。为提高偏航的抗冲击干扰性能和准确度,在偏航程序中增加了减少偏航执行机构滞后程序。另外,系统安装过程中要对轮系构件进行轴向限位,特别要注意偏航减速器齿轮与偏航模拟盘齿轮的啮合情况,对偏航减速器与金属转盘的碰撞力进行分析,以防3台偏航减速器运转时产生碰撞与干扰,增加齿轮机构的摩擦力和碰撞力。
6 结语
对风机偏航系统的模拟仿真系统软硬件的设计与实现,给学习和研究风电偏航系统的学生提供了实物平台,为风电从业人员提升技能和故障分析能力奠定了基礎,也为设备及系统改进创造了一定的条件。
[参考文献]
[1] 刘莉莉,段斌,李晶,等.基于IEC 61850的风电场SCADA系统安全访问控制模型设计[J].电网技术,2008,32(1):76-81.
[2] 高峰,凌新梅,刘强.基于SCADA数据的风电机组偏航控制参数优化[J].太阳能学报,2019,40(6):1739-1746.
[3] 王欣,吴根勇,潘东浩,等.基于运行数据的风电机组偏航优化控制方法研究[J].可再生能源,2016,34(3):413-420.
收稿日期:2021-02-26
作者简介:高海涛(1983—),男,四川达州人,讲师,工程师,从事电气工程(风力发电)领域教育教学及项目工作。
