单双频GPS混合观测高精度单频精密单点定位
2021-05-14邹俊平王解先
邹俊平,王解先
(同济大学测绘与地理信息学院,上海200092)
导航定位技术在地球科学[1-2]、现代空间科学[3-6]和精密授时[7-8]等众多领域得到了广泛应用。导航定位精度与其接收机和全球导航卫星系统(Global Navigation Satellite System,GNSS)对应的服务参数性能有关,高精度的定位需要以高性能的GNSS接收机为前提。单频GNSS接收机以其价格优势具有广泛的用途,但其定位精度受限于提供的大气改正。在GNSS 单频相对定位中,大气影响可以通过双差模型予以抵消。但随着基线长度的增加,大气对定位结果的影响增大。单频接收机定位中,电离层延迟的影响只能通过改正模型和服务来减弱或消除。对于电离层延迟的估计与建模,国内外诸多学者进行了详细的研究[9-19]。但在GNSS 电离层延迟解算中,普遍采用了伪距观测值和相位平滑伪距观测值,受伪距观测噪声和平滑弧段长度的影响,解算得到的电离层延迟精度有待进一步提升。有研究采用双频观测进行高精度的电离层延迟解算,解算得到的高精度电离层延迟通过内插应用于单频精密单点定位中,提升了定位的精度[20]。目前城市分布有大量的双频观测站,为单频精密单点高精度数据处理提供了丰富的数据资料,有利于进一步降低精密单点定位的成本。但单频精密单点定位仍然受相位小数偏差影响,需要进行相位偏差的解算与服务。高精度单点定位结果参考基准与服务的卫星轨道和钟差产品相关,不受局域参考设施变化的影响[21],拓展了精密单点定位的应用范围。
传统精密单点定位中,相位模糊度参数受非整数偏差影响,不能进行模糊度固定。为了实现精密单点定位模糊度固定,需要进行非整数相位偏差的估计和服务[21]。有研究表明,单双差相位模糊度可以互相利用,这样既可以实现精密单点定位中相位模糊度参数的固定[21],也可以确定区域高精度定位的基准。考虑到单频接收机的价格优势,以及双频观测在高精度电离层延迟解算中的作用,本文将研究单双频GPS 接收机混合快速高精度绝对定位,分析双频观测求解的电离层延迟的精度,讨论单频精密单点定位的相位模糊度固定方法,为单双频GPS接收机混合快速高精度定位和应用提供参考。
1 数学方法
单频精密单点定位中,高精度电离层延迟服务是其中的主要程序之一,为了获得高精度的电离层延迟,采用双频观测进行估计。在获得高精度电离层延迟之后,分别进行精密单点定位解算。充分应用解算得到的单、双差相位模糊度,实现单频精密单点定位的模糊度固定,以提高其定位精度。
1.1 单频精密单点定位
单频观测可以写为
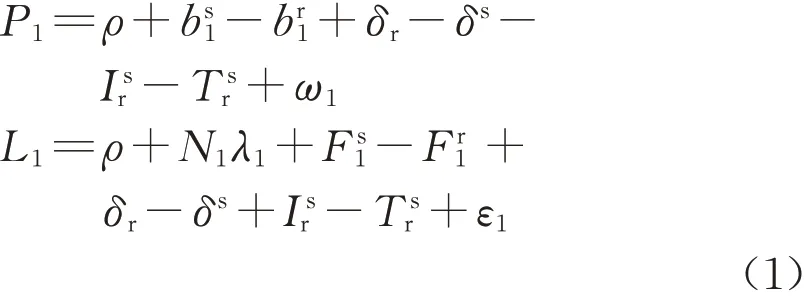
式中:P1为伪距观测值;L1为相位观测值;ρ 为站星间距离;bs1为卫星对应的硬件偏差;br1为接收机对应的硬件偏差;δr为接收机钟差;δs为卫星钟差;Isr为L1观测对应的电离层延迟;Tsr为对应的对流层延迟;N1为L1观测对应的相位模糊度,其波长为λ1;Fs1为L1观测对应的卫星相位小数偏差;Fr1为L1观测对应的接收机相位小数偏差;ω1和ε1分别为伪距和相位观测对应的观测噪声。单频精密单点定位中,其精度不仅仅受对应的卫星轨道和卫星钟差的影响,也受电离层延迟模型影响。
1.2 电离层延迟
随着实时卫星轨道和钟差产品的发布和服务,高精度电离层延迟模型化成了制约单频高精度单点定位的主要因素之一,为了获得高精度电离层延迟服务,提出了高精度电离层延迟的服务方法。双频GPS观测中,无几何影响相位、伪距观测可以写为
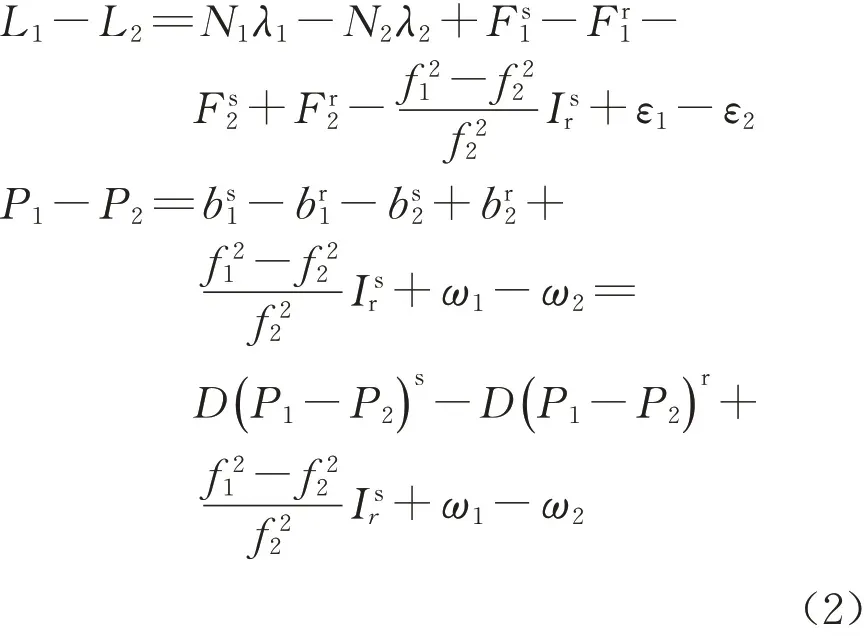
式中:P2为伪距观测值;L2为相位观测值;bs2 为卫星对应的硬件偏差;br2为接收机对应的硬件偏差;N2为L2观测对应的相位模糊度,其波长为λ2;Fs2为L2观测对应的卫星相位小数偏差;Fr2为L2观测对应的接收机相位小数偏差;ω2和ε2分别为P2和L2观测对应的观测噪声;f1和f2分别为L1和L2观测对应的频率;D(P1-P2)s、D(P1-P2)r分别为卫星、接收机对应的差分码偏差。无几何影响相位观测历元间差分,可以抵消掉模糊度项,求解到电离层延迟的变化量为

当选择一参考历元,则相对参考历元的电离层延迟变化量为

式中:Isr,k为卫星参考历元k对应的电离层延迟,可以采用无几何影响伪距观测进行求解。当采用双频观测数据获得高精度电离层延迟之后,可以通过内插的方法得到单频站对应的电离层延迟。内插可以采用以下反距离加权方法计算:
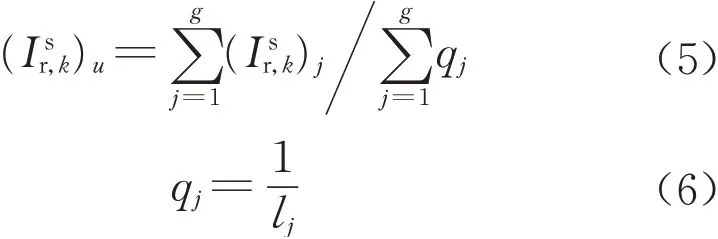
式中:g为双频观测站个数;(Isr,k)u为内插得到的单频观测站u 的电离层延迟;qj为双频观测站j 对应的权;lj为双频观测站j 到单频观测站u 的距离。单频测站在获得了高精度的电离层延迟后就可以进行高精度的单点定位。
1.3 单、双差相位模糊度相互应用
通常精密单点定位模糊度固定通过卫星端相位小数偏差的估计与服务来实现。类似于双频精密单点定位模糊度固定方法,采用参考站估计得到的卫星端相位小数偏差,然后再服务于单频观测用户。同样,把其他用户u 对应的单频模糊度浮点解代入其他用户用w,则有
式中:N1u为测站u对应的单频模糊度;N1w为测站w对应的单频模糊度;Ius为测站u对应的电离层延迟;Tus为u 对应的对流层延迟;δu为用户u 对应的接收机钟差;∆∇N1u,w为测站u与测站w对应的双差模糊度,具有整数性;ε1u为用户u 对应的L1观测噪声。
式(7)表明,当一个用户对应的单频模糊度代入另外一个用户的模糊度时,可消除对应的未检校准确的相位偏差,获得一个具有整数特性的单频双差模糊度。
2 数据处理
单双频接收机混合高精度绝对定位是利用双频观测进行高精度电离层延迟计算,然后把计算得到的电离层延迟应用于单频用户高精度绝对定位中。考虑未检校的相位偏差对单频单站绝对定位的影响,采用单、双差模糊度的互相利用,以提高单频精密单点定位的精度。本文考虑了相对定位和绝对定位的优势,实现了GPS 的最佳应用,对应的数据处理流程如图1所示。其中精密单点定位对应的设置如表1所示。
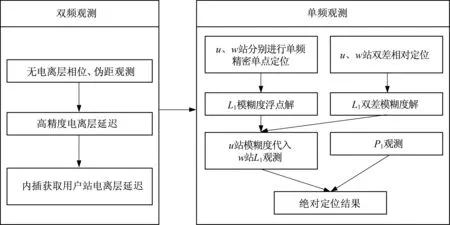
图1 单双频接收机混合高精度单频精密单点定位流程图Fig.1 Flow chart of mixed application of single and dual frequency receivers in single-frequency precise absolute positioning
为了分析所提出方法的正确性,采用位于上海的7 个GPS 双频观 测 站2020 年4 月23 号24 h 观 测数据进行数据处理,其中SH01、SH03、SH04、SH05和SH06 为用户站,采用测站的L1观测进行单频精密单点定位数据处理;CS01和CS02 为参考站,用于进行电离层延迟的计算和用户站电离层延迟的内插。数据采样间隔为30 s,卫星截止高度角为10°。7个GPS观测站的分布如图2所示。
2.1 电离层延迟结果分析
采用CS01、CS02 的双频观测数据进行高精度电离层延迟计算,然后采用计算得到的电离层延迟进行单频用户SH01、SH03、SH04、SH05和SH06对应电离层延迟的内插。电离层延迟计算采用1.2 节中所提出的方法。为了验证内插得到的单站用户的电离层延迟的精度,对用户SH01、SH03、SH04、SH05和SH06站双频观测得到的电离层延迟进行了比较。比较过程中,统计分析了各卫星对应斜路经电离层延迟的RMS(root mean square),其中用户SH03 和SH04 对应的电离层延迟RMS 如图3、4 所示。图3、4 表明,电离层延迟内插精度大部分优于0.01 m,达到了毫米级别。比对分析用户SH05 和SH06对应的结果都能达到优于0.01 m的精度。这完全满足单频单站用户精密单点定位的要求。
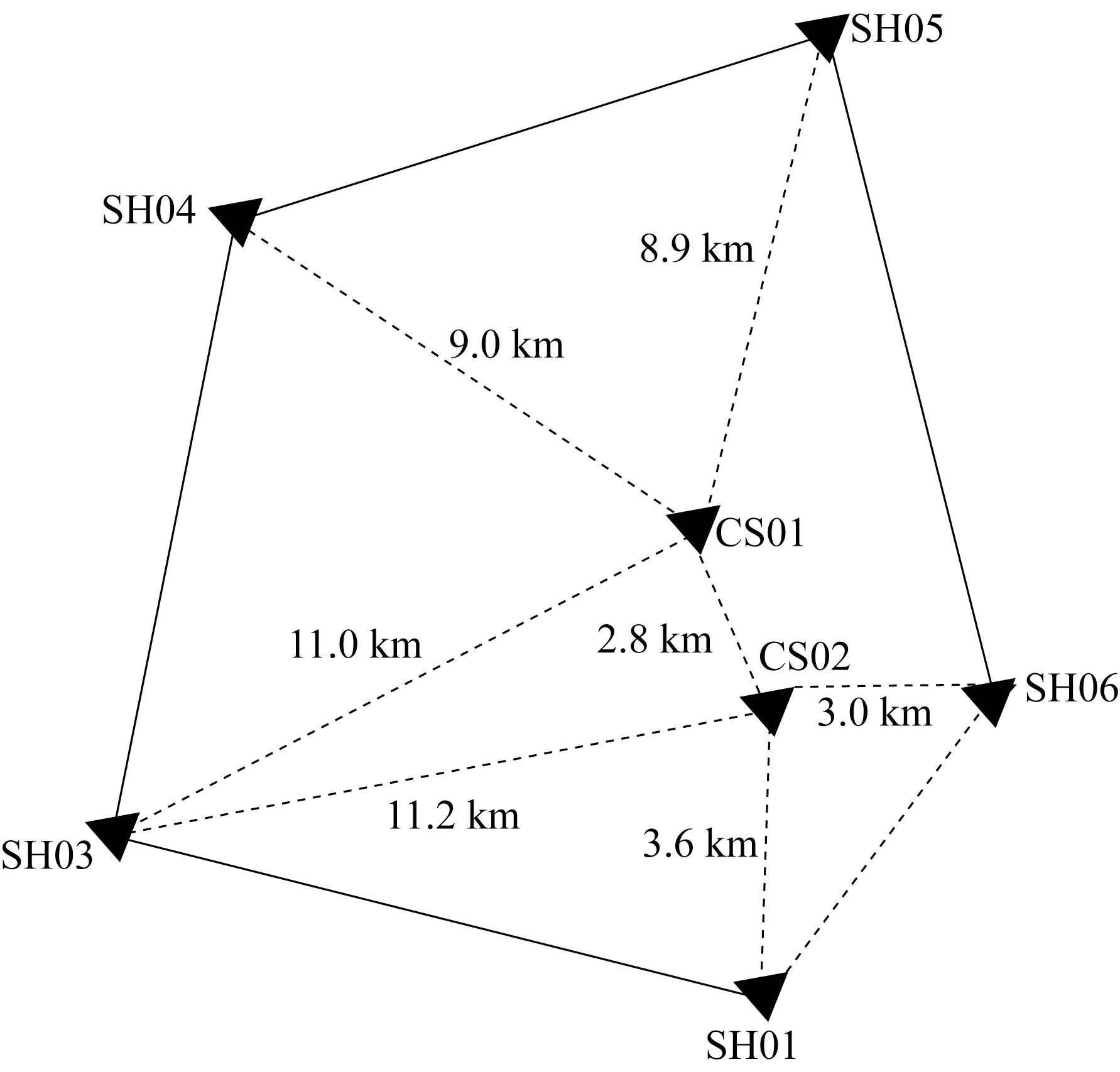
图2 GPS观测站分布Fig.2 Distribution of the GPS observation stations
2.2 单频精密单点定位结果分析
在用户SH03、SH04、SH05和SH06得到高精度的电离层延迟之后,进行单频精密单点定位解算。数据处理中,卫星轨道和钟差采用了IGS(international GNSS service)事后产品。其中用户站SH03 对应的定位序列如图5 所示。用户SH03、SH04、SH05和SH06单频精密单点定位24 h静态定位结果如表2 所示。其中参数收敛时间定义为3 个方向都达到厘米级所用的时间。图5和表2都表明,采用双频观测提供的高精度电离层延迟进行单频单站数据处理能实现厘米级定位,达到双频单点定位的精度。这充分验证了单双频混合应用的优势,可以降低单一采用双频进行精密单点定位的费用。
单频、双频单点定位都受相位小数偏差影响,模糊度不具有整数特性,从而不能进行模糊度固定。为了进行单点定位模糊度固定,一般先采用相位偏差的求解和服务来实现。双差模糊度在单频精密单点定位中的应用是把固定之后的双差模糊度应用于单频精密单点定位中,以替代相位小数偏差的估计和服务。本文所提方法中,单频双差模糊度由两个测站L1对应双差观测生成。对用户站采用所提出的方法进行了数据处理,对应结果如表3所示。表3结果表明,24 h 观测定位结果在3 个方向都有所提高,参数收敛时间都有所提升。其中北、东、高程3个方向的定位结果平均提升分别为0.23、0.14、0.21 cm,参数收敛时间平均提升了7 min。
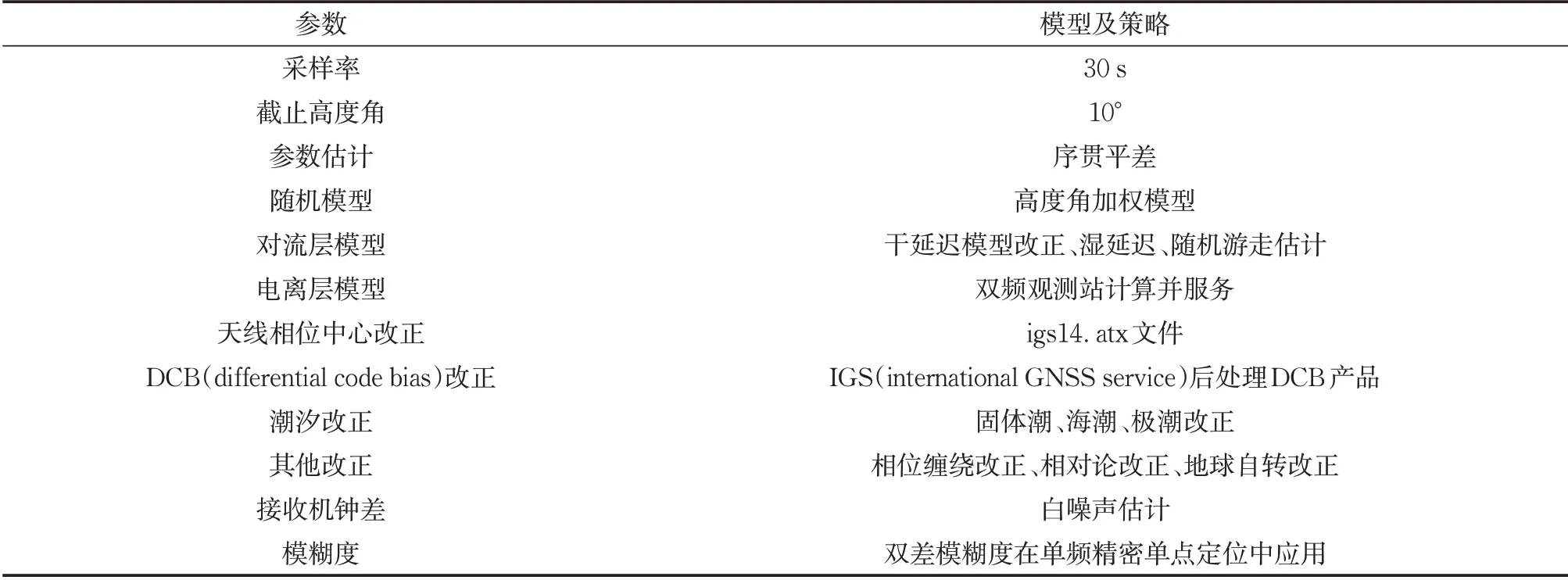
表1 精密单点定位数据处理设置Tab.1 Data processing setting for precise point positioning
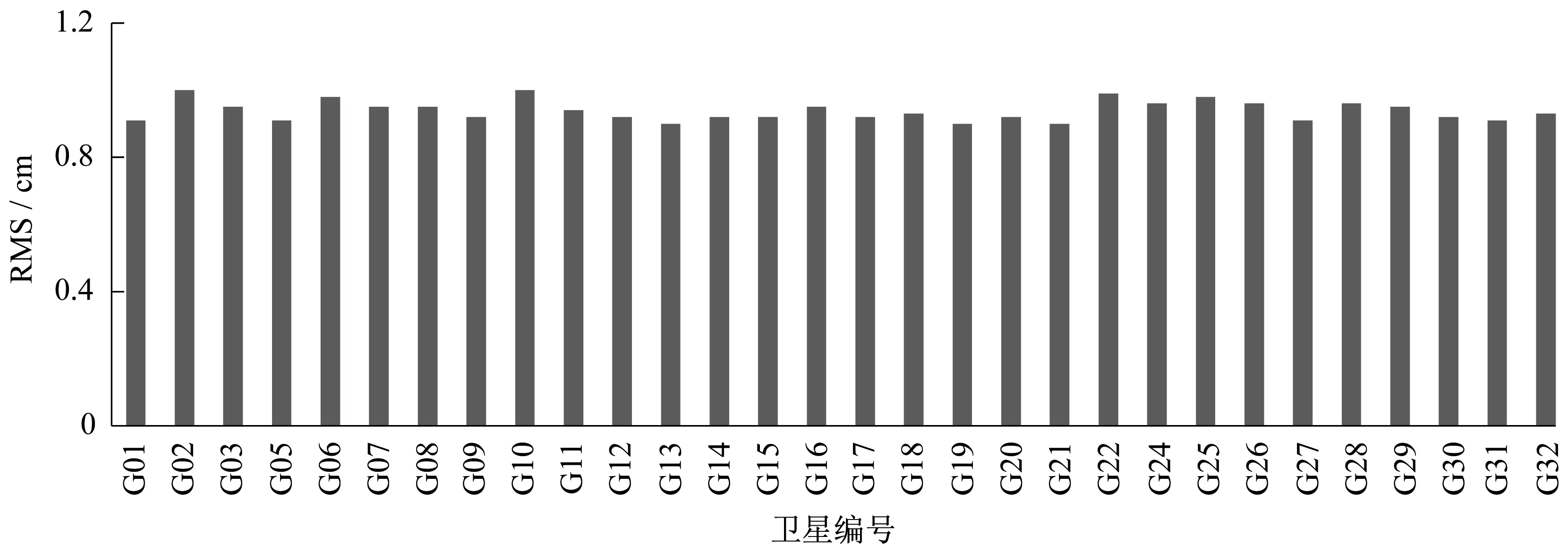
图3 SH03 站对应内插电离层延迟精度Fig.3 Accuracy of estimated ionospheric delay for the observation station of SH03
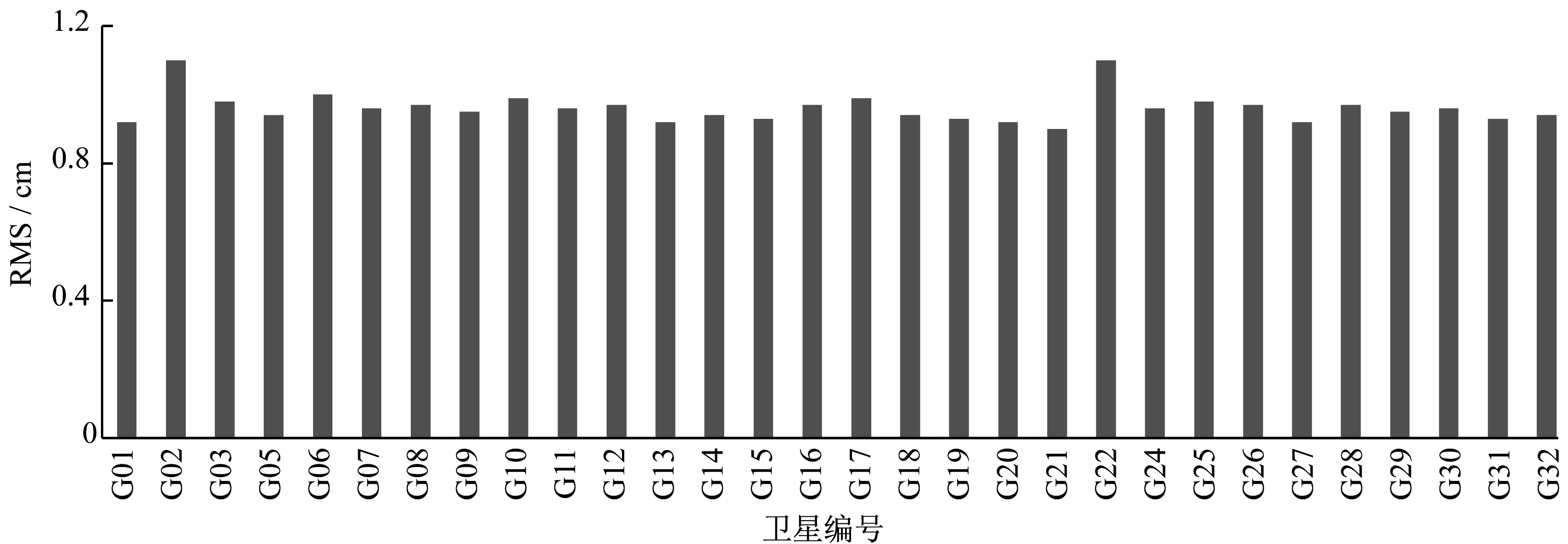
图4 SH04 站对应内插电离层延迟精度Fig.4 Accuracy of estimated ionospheric delay for the observation station of SH04
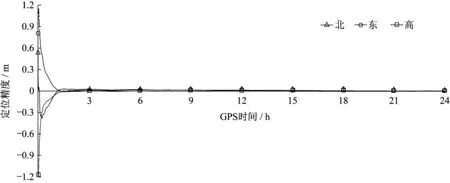
图5 SH03 站单频精密单点定位静态结果序列Fig.5 Static positioning results of the station of SH03
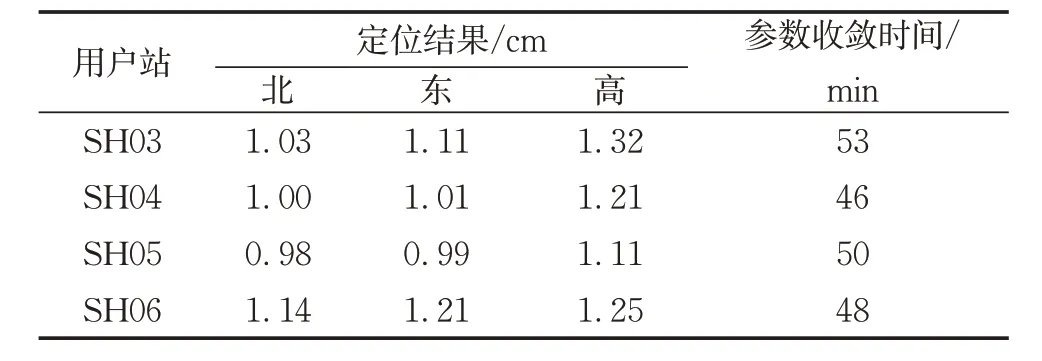
表2 用户站24 h静态定位结果Tab.2 24 hour static positioning result of user stations
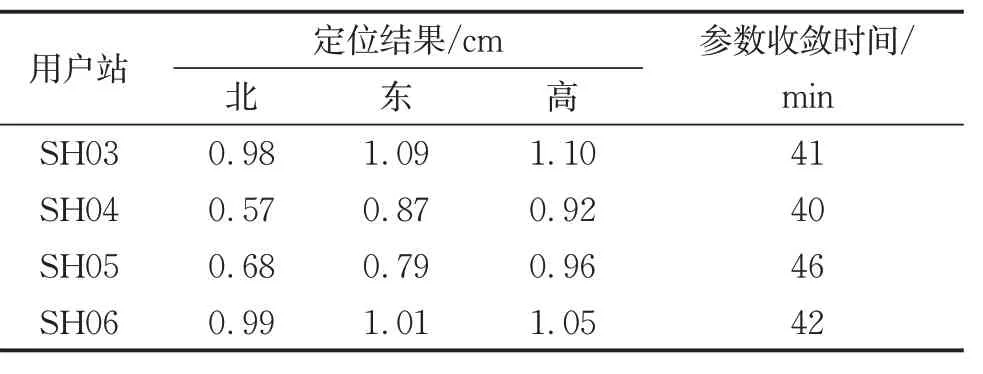
表3 固定模糊度的用户站24 h静态定位结果Tab.3 24 hour static positioning result of userstations for ambiguity fixing
3 结语
精密单点定位结果与对应的服务产品卫星轨道和钟差有关,不受局域观测和设施的影响,因此,利用精密单点定位这一优点开展形变监测,获得了广泛认可。单频精密单点定位中,需要高精度的电离层延迟解算与服务,其解算精度严重影响定位的精度。为了实现单频单点定位,通常采用双频观测进行高精度电离层延迟的解算,为此提出了单双频混合观测的方法。但单频精密单点定位仍然受相位非小数偏差的影响,为了进一步提高单频精密单点定位精度,进行了单频精密单点定位解算,把双差观测对应模糊度应用于单频精密单点定位模糊度处理中。本文采用观测数据进行了解算,结果表明,电离层延迟精度优于1 cm,满足单频单点高精度定位的要求。采用解算得到的电离层延迟进行单频精密单点定位,可实现厘米级定位结果。双差模糊度应用于单频精密单点定位的结果表明,参数收敛时间平均缩短约7 min,在北、东、高程3 个方向的定位结果平均提升分别为0.23、0.14、0.21 cm。
作者贡献说明:
邹俊平:数据处理与分析。
王解先:模型分析。