基于ARM架构的多功能轨道动态运维平台的设计与实现
2021-05-13唐家运
唐家运
(安徽城市管理职业学院 轨道交通学院,安徽 合肥 230011)
我国近几年在轨道建设和维护上均都维持在8 000亿元左右的投入〔1〕,国家铁路局明确大力推进铁路安全监控监测系统建设。铁路运维现状仍然是以静态、人工检测为主,检测效率低下,人工成本高昂〔2〕。文章平台能够实现高精度的轨道运维基本参数的动态、静态检测同时搭载专用轨道运维设备,实现运维检测的综合运用,极大提高的轨道的运维、检测效率并且降低了人工成本,充分发挥了天窗期的有效工作时间。
1 方案论证与选择
设计的宗旨是便于用户使用和维护,功能齐全,主要设计了两种方案:
方案一:触控一体机结合stm32嵌入式架构〔3〕,触控一体机处理上位机及算法软件的设计以及人机界面的设计,stm32用作运动控制、数据采集、交互。
方案二:stm32嵌入式架构+串口屏,stm32作为控制核心,用作运动控制、数据采集、运算处理、接口交互等,串口屏作为数据监控、设置交互。
结合用户实际使用需求,以及两种方案的对比,方案二整体尺寸更小、重量更轻、成本更低,性能满足用户需求,故本设计采用方案二。
2 电路与程序设计
2.1 硬件电路
系统的硬件电路由主控板+串口屏+信号采集传感器++驱动机构+用户搭载模块组成,系统框图如图1所示。系统能够实现无线遥控、行驶、传感器数据检测、计算、参数监控、设定、远程数据传输、驱动控制、预留多种常用通讯接口。

图1 系统框图
2.1.1 主控板
主控板PCBA是以STM32F103ZET6作为控制内核、结合W5500以太网模块、光耦隔离电路(PS2801)、AD信号调理电路(LM324)、电源芯片、串口通讯电路(Max232、SP3485、TJA1050)、数据存储电路(24C02、W25Q128)等组成。电路原理图如图2所示。

图2 主控电路原理图
2.1.2 辅助调平机构
辅助调平机构是由一个自动可调节角度的平台,其作用是外部搭载的设备可以放置在此平台上,根据需求自动调节水平角度,不受车体运动影响。其内部安装有倾角传感器作为闭环PID控制的数据部分,激光测距传感器可以检测装置,实时检测外部被测物的距离。一个重要功能是搭载运维人员常用的限界涂画装置。
2.1.3 行走部分
行走部分主要由步进电机及驱动器组成,双驱布置,主要作用是控制车体的运动行驶。采用双驱步进电机的优势是结构可以设计更加紧凑,成本更低,定位精度高。通过无线遥控器及UI界面可设定的几组行驶速度,实现遥控行驶,或者按照设定方式行驶。
2.1.4 搭载接口
搭载接口是本系统的一大特点,柔性化的支持多种通讯方式的设计方式,便于很多设备集成运用,比如激光测量仪、自动涂画设备、限界测量设备、打磨设备等等。搭载的设备只需具备一些基本的数据协议的对接、设定,即可完成系统的集成运用。主流程图及pid控制部分流程图如图3、4所示。
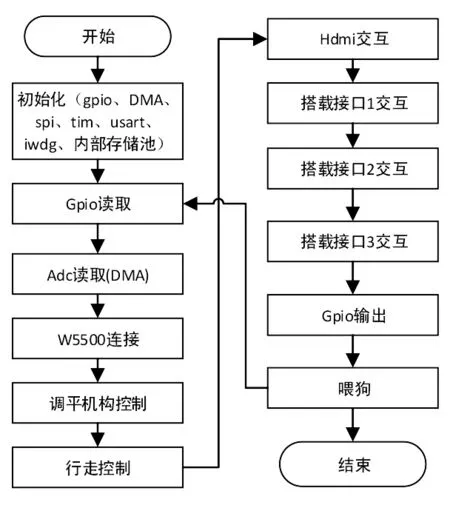
图3 主程序流程图

图4 pid控制部分流程图
2.2 控制算法设计及主要流程图设计
本设计主要运用到复合滤波算法、多传感器融合算法、PID控制算法、空间几何等算法对信号采集、分析、处理,对驱动部分进行运动控制,数据进行存储、调用。下面对主要用到的算法进行说明:
(1)复合滤波算法〔4-5〕。LM324采集的模拟量数据,采用的滤波方式是限幅滤波+递推平均滤波法,对每次采样的数据进行限幅处理,再存入数组进行递推平均滤波处理,此方法能一定程度上消除干扰引起的信号波动。如图5所示。
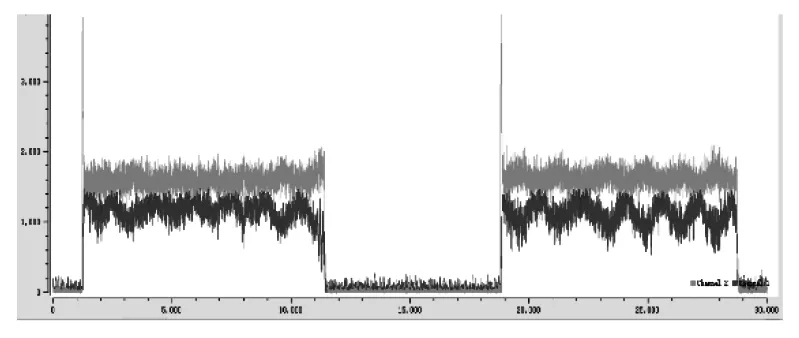
图5 复合滤波效果图
(2)多传感器融合算法〔6〕。为了提高重要数据的检测精度,比如限界值检测。采用多组不同类型的激光测距传感器检测并融合计算,利用卡尔曼滤波及预测原理,通过各自检测的均方误差判断权重,得到最优的融合结果。卡尔曼滤波方程如下所示:

(3)PID控制算法〔7〕。此算法用作几组步进电机的运动控制程序中,采用增量式PID算法结合相关限制参数,保证电机能够快速、平滑的加减速到设定目标值。PID计算公式如下:
ΔPn=Kp(en-en-1)+Kien+Kd(en-2en-1+en-2)
其中,ΔPn指计算机输出的增量,Kp为比例系数,Ki为积分系数,Kd为微分系数,en为第n次采样时的偏差值。
3 系统设计与实现
根据系统功能,硬件电路暂采用正点原子开发板+外围接口电路进行功能验证,机械结构部分采用现有的轨道测试平台,组装测试后的效果如图6、7所示。

图6 硬件电路搭建 图7 测试运行工况
硬件及结构中组装完毕后,首先进行接口调试,信号采集及输出正常后,将设备放置在测试轨道上,速度分别设定为1 km/h~3 km/h,遥控器控制调速,人机界面上监控软件实时监控运行参数,结果满足设计要求。
4 结论
该系统设计的多功能轨道平台,具备功能齐全、提高工作效率、兼容性较强的特点,后期对软件和硬件进行完善和优化,争取达到更加稳定高效。
