嫁接苗回栽装置的发展现状及展望
2021-05-13王鹏皇甫坤张秀花袁永伟静茂凯张明王健
王鹏 皇甫坤 张秀花 袁永伟 静茂凯 张明 王健
(河北农业大学机电工程学院,河北 保定 071001)
引言
1980年以来,各国就开始了对自动嫁接技术的研究,主要代表国家有荷兰、日本、韩国和中国等[1-4]。并且根据不同的自动嫁接技术所研发的自动嫁接机也层出不穷。在众多的嫁接方法中,双断根嫁接法[3-7]是一种新的嫁接方法,区别于其它的嫁接方法,双断根嫁接法是将接蕙和砧木的原有根系全部切除,进而完成嫁接作业,在嫁接苗愈合的同时诱导新根系的产生。双断根嫁接法与其它嫁接方法相比,在嫁接成活率、嫁接功效、嫁接效率上分别提高了8%、46.8%、32%,极大地推进了工厂化育苗的发展[8-10]。
1 蔬菜嫁接机研究现状
2009年,荷兰研制出了一款ISO GRAFT 1000嫁接机,该款嫁接机能够利用图像处理技术提前剔除生长不合格的穴盘幼苗,从而保证嫁接完成的幼苗全部为健康苗;2011年,日本井关公司[11]研发出一款嫁接机,该款嫁接机能够实现将接穗和砧木的原有根系全部切除,从而实现双断根嫁接。国内,2010年,楼建忠等[12]研发的2JX-M系列气力蔬菜嫁接切削器可对砧木和接穗进行自动切削作业,提升了断根嫁接的自动化程度;2012年,北京农业智能装备研究中心姜凯等人[13]研发了一款瓜、茄苗蔬菜嫁接机,并进行了样机试验,结果表明,嫁接速率可达到人工作业的6~7倍;2014年,张铁中团队[1,2]研发一款单人操作的蔬菜嫁接机,该机器可以根据需要对嫁接苗进行断根和留根嫁接。为了提高双断根自动嫁接机的自动化程度,国内外已研制出不少嫁接机能够实现蔬菜苗的双断根嫁接,但嫁接之后的嫁接苗回栽工作大部分仍然需要人工完成。
2 蔬菜嫁接机自动回栽装置的研究现状
根据嫁接苗回栽农艺要求可知,在基质内打出深度为2~3cm的孔,然后利用夹持移栽装置夹持嫁接苗,并将嫁接苗准确地插栽到穴盘穴孔中是回栽装置的重点。而要实现该功能,最重要的是对回栽装置进行研究,因为回栽装置与嫁接苗是直接接触的,所以回栽装置是嫁接苗回栽的关键部分,回栽装置直接影响了回栽的成功率与效率。
2.1 国外研究现状
2016年,YAJIMA等[14]研发了一种嫁接苗的栽植机构,主要由底板、隔板形成的复数网格、安装在底板一侧并耦合在隔板之间的后板所组成,如图1所示,可以尽可能减少对穴盘苗的损伤,提高穴盘苗生长的质量和产量。2020年,Zhongjian Xie等人[15]研发设计了一种茄果类半自动高速嫁接机,如图2所示,其中嫁接苗采用无纺布包裹基质,回栽机构和上苗机构采用相同的结构,利用气动Y形手指和上下方向导杆气缸来完成嫁接苗的回栽工作。
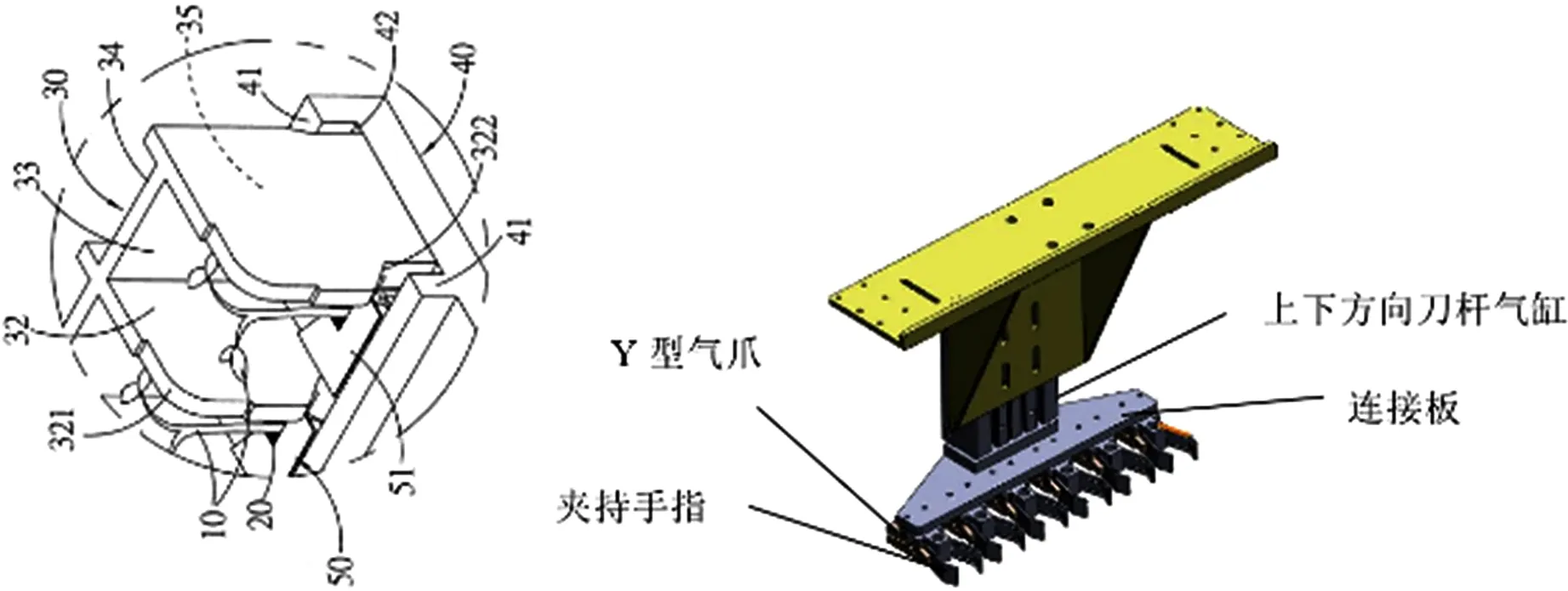
图1 回栽装置 图2 嫁接苗回栽机构
美国RAPID公司[16]研制了一款RTW型穴盘苗移栽机,其夹持机构如图3所示。该装置主要由喷水管、楔形块和片状手指组成,驱动方式为气动,其结构简单,可以很好地实现对穴盘苗的栽植工作。2017年,ZHANG K等人[17]研发了一款嫁接苗回栽装置,嫁接苗采用贴接法,利用塑料嫁接夹固定嫁接苗,当砧木和接穗的切口有效贴合后,用嫁接夹的夹头对切口贴合位置进行夹持固定,夹持固定后由嫁接苗回栽装置将嫁接苗回栽到穴盘内,如图4所示。

图3 片状夹持装置 图4 嫁接苗回栽机构
2020年,Rahul K等人[18]研发了一款四自由度的钵苗移栽机器人,机械手由多连杆组成,由步进电机驱动,采用液晶显示屏和键盘作为人机交互界面,实现了纸罐苗的连续取苗和放置,如图5所示。

图5 穴盘苗夹取部件
2.2 国内研究现状
2007年,东北农业大学的崔凤有[19]设计了一种嫁接苗回栽装置,该装置主要由打孔镇压装置、上下夹同步杆、上夹、下夹等部分组成,如图6所示。回栽嫁接苗作业时,由打孔镇压装置在穴盘基质内完成2次打孔作业,然后在同步杆的作用下随着上下夹夹口的打开与结合从而实现嫁接苗的回栽过程。2013年,浙江理工大学的杨蒙爱等人[20]研发了一种主要由基座和夹持机械手等部分组成的嫁接苗回栽装置,能从嫁接工位处成功夹取嫁接完成的苗,并将其回栽到对应的穴盘里。

图6 嫁接苗回栽装置示意图
2016年,中国农业大学的褚佳、张铁中等人[6]提出了一种黄瓜嫁接苗回栽装置,如图7、图8。根据黄瓜断根嫁接的园艺要求,由插孔机构在穴盘基质上打出2~3cm的孔,再由插苗机构从移苗机构处接过以嫁接好的幼苗进行回栽工作。

图7 回栽装置 图8 打孔装置
2015年,浙江理工大学的陈晨[21]设计了一种双滑块摇杆式回栽机构,该装置主要由夹持嫁接苗装置、嫁接苗回栽装置、基质镇压装置等部分组成,如图9所示。该机构回栽成功率为92%,愈合成功率为94.6%,但是该机对于嫁接苗的茎秆弯曲程度以及基质土的湿度考虑不充分,稍加改善应该会有更好的效果。2017年,浙江理工大学的泮金辉[22]设计了一种多连杆滑块回栽机构,此机构包含夹持嫁接苗、基质自动打孔、嫁接苗回栽、基质镇压4道工序,该机构的核心装置是由2个气缸共同驱动多连杆机构负责对嫁接苗的加持、打孔、回栽和镇压等动作。因为该机构受2个气缸的作用,因此会产生相互影响,进行了回栽实验,整体成功率为92%,回栽阶段与镇压基质阶段成功率均达到96%,整体成功率较高,如图10所示。
2017年,浙江理工大学的童俊华[23]等人设计了一种适用于双断根嫁接机的自动搬运及回栽装置,如图11所示。嫁接苗回栽机构夹取嫁接苗后移动到相应的穴盘上方,由回栽机构对穴孔基质打孔并将嫁接苗插入基质中镇压,完成回栽作业,成功率可达92%,平均耗时4s/株。2020年,河北农业大学的皇甫坤等人[24]设计了一种嫁接苗回栽装置,该装置主要由吸持部件、镇压机构和围拢部件组成,如图12所示,并针对不同倾斜角度的镇压块对土壤总孔隙度的影响进行了EDEM离散元仿真分析。

图9 回栽机构 图10 多连杆回栽机构

图11 自动回栽机构 图12 回栽机构
3 总结与展望
3.1 国内发展现状总结
为了提升双断根嫁接机的自动化程度,国内外很多研究团队已经研制出各类的自动嫁接机,部分嫁接机也已经实现自动化。但嫁接完成后的嫁接苗回栽依旧采用人工作业,现有的回栽装置在不损害嫁接苗方面做得还不是很完善,并且机构复杂不易调整,所以亟需寻求一种更好的嫁接苗回栽装置。
3.2 发展趋势与展望
目前的嫁接苗回栽装置在嫁接苗回栽过程中,容易将砧木的茎秆造成挤压损伤,砧木和接穗的嫁接夹子出现松动或脱离的情况,所以回栽装置需要在不损害嫁接幼苗的情况下顺利夹持幼苗,成功插入穴口并顺利退出,同时还需要对基质的损坏情况降到最低。
当前的嫁接苗回栽装置机构复杂不易调整,设计一种将嫁接苗夹持、打孔、回栽和镇压于一体的需要回栽机构,并使其整体结构简单,实用性强。
