大藤峡水利枢纽工程截流龙口流速监测关键技术研究与应用
2021-05-10田苏茂曾雅立黄童
田苏茂 曾雅立 黄童
摘要:2019年11月,广西大藤峡水利枢纽工程进行大江截流。截流过程中,受龙口流速测验环境限制,无法使用传统方法施测,因此采用了无人机载电波流速仪、侧扫雷达、电子浮标等新型测验方法。在截流期间,通过新方法获得了大量以截流龙口流速为代表的重要参数,为工程截流决策提供了重要依据,施测效果良好,同时也显示出3种新型测验方式在龙口流速测验方面的适用性和局限性。综合来看,在传统方法无法施测时,这些方法可作为获取水文数据的重要手段,并根据实际情况在应用过程中不断优化。
关键词:龙口流速;侧扫雷达;无人机载电波流速仪;电子浮标;大江截流;广西大藤峡水利枢纽
中图法分类号:P335文献标志码:ADOI:10.15974/j.cnki.slsdkb.2021.04.003
文章编号:1006 - 0081(2021)04 - 0020 - 05
1 测区概况
大藤峡水利枢纽工程位于珠江流域西江水系的黔江河段末端大藤峡出口弩滩处(即广西壮族自治区桂平市南木镇弩滩村),控制面积19.86 万km2,占西江流域面积的56.4%,西江水资源量的56.0%,控制洪水总量占梧州站洪量的65.0%。地理坐标为东经110°01′、北纬23°28′。
大藤峡水利枢纽工程作为国务院确定的172项节水供水重大水利工程之一,集防洪、航运、发电、水资源配置、灌溉等综合效益于一体,是珠江流域防洪关键控制性工程和水资源配置骨干工程,被誉为珠江上的“三峡工程”。 大江截流采用从右岸一侧单戗堤进占、立堵截流方式[1]。
2 截流龙口流速监测特性
合龙前期,采用走航式ADCP进行龙口上下游流速场测验,收集到了从截流开始至龙口形成这段时间内龙口断面、龙口上游100 m、龙口下游100,200 m等各处流速场值。龙口形成后,形成落差达2 m以上的水跌,流速超过4 m/s,考虑到安全因素,测船无法施测龙口附近流速,传统流速测验方法失效。因此及時启动了水文应急监测。
水文应急监测是应对突发性水事件的非常规状态下的水文应急工作,具有紧迫性、艰巨性、复杂性和非常规性等特点。由于水文应急监测时效性较高,需在短时间内提交监测信息,要求水文应急监测的仪器设备先进、自动化程度高、精度高、便于携带等。
此次,大藤峡龙口截流就是在特殊条件下(如龙口浪大、流速大、常规设备无法进入测区、戗堤裹头坍塌严重、安全隐患多等)开展的水文应急测验工作,测量人员面临严峻挑战。根据测区具体情况和目前我国水文应急监测所应用的先进技术设备优缺点,主要采用了流速矢量场实时监测系统(由电子浮标、侧扫雷达、无人机携载电波流速仪等高新技术设备组成)监测龙口河段流场变化和龙口水面流速大小。侧扫雷达和无人机载电波流速仪测验属于非接触式测验,只需在上游指定位置投放浮标仪器即可记录轨迹数据,均可替代传统法进行龙口流速施测。
3 无人机载电波流速仪监测龙口水面流速
3.1 工作原理
无人机测流系统主要由无人机平台、雷达测流仪、便携计算机等组成,通过无人机平台搭载雷达测速仪在河道指定断面开展非接触性测流,将表面流速传回便携式计算机的测流软件并计算流量。测流前,根据河道断面情况和实地勘察周围环境预设航线,包括起点距、空中高度和悬停时间。测流时,无人机依次在指定垂线处悬停测流,实时传回表面流速数据,通过测流软件计算断面流速流量数据,并生成成果报表,测流完成后,无人机按照预设轨迹返回指定位置[2]。测速工作原理如图1所示。
电波流速仪发出一个微波能量束(无线电波),当波的能量撞击到水面时,部分能量返回到雷达设备天线,返回信号的频率变化与目标的速度成比例,根据发射和返回信号的频率不同测定水面流速,计算公式为
[V=C2f0cosθfD] (1)
式中:V是水面流速,m/s;C为电波在空气中传播速度,m/s;[θ]为发射波与水流方向的夹角,[f0]为雷达频率,Hz;[fD]为电波的多普勒频移。
3.2 数据代表性分析
测量龙口流速时,无人机位于龙口下游25 m。无人机地面控制站能够实时显示坐标信息,测量完成后,无人机往下游飞行实时测量各点流速,寻找最大流速位置,并悬停15 s以上采集流速信息。根据无人机软件计算显示流速,并取其平均值统计最大流速及其位置。数据显示,龙口最大流速在龙口下游28 m处,与三峡工程大江截流时龙口最大流速位置范围较为相似,说明合龙时,龙口一带最大流速并非在龙口处,而是位于龙口水舌下沿。
2019年10月26日,无人机测得表面流速与手持电波流速仪测得流速误差在0.2 m/s以内,说明无人机测量龙口数据具有一定精度,基本能代表龙口当时水面流速变化实际情况,具体数据见表1。监测数据表明,龙口下游水舌处流速比龙口轴线上流速大,两者比值平均为1.14,水舌间距龙口轴线下游30 m以内。
4侧扫雷达监测龙口水面流速
4.1 工作原理
雷达是利用目标对电磁波的反射(或散射)现象来发现目标并测定其位置和速度等信息的。雷达利用接收回波与发射波的时间差来测定距离,利用电波传播的多普勒效应来测量目标的运动速度,并利用目标回波在各天线通道上幅度或相位的差异来判别其方向[3]。超高频雷达河流流速(流量)监测技术还用到布拉格(Bragg)散射理论。
[Δf=2VSλ=2Vcr+Vpλ=2VcrfB] (2)
[fB=2Vpλ=2λgλ4π=g4π≈0.102f0] (3)
式中:[fB]为多普勒频率,Hz;[Δf]为一阶Bragg峰位置偏离标准Bragg峰的程度,Hz。
对于等宽的顺直河道,河水流向与河岸是平行的。如图2所示,河道为顺直河道。如果A、B点与河岸的垂直距离相同,理论上有[VA=VB]。
基于侧扫雷达的测流系统采用非接触式雷达技术,超高频雷达可以获得表面径向流,通过矢量投影与合成的方法就可以得到矢量流。利用多普勒原理测量河流表面多个单元流速,建立单元表面流速与断面平均流速的关系,经流速面积法计算得到断面流量。
单站超高频雷达可以获得表面径向流,系统野外站结构见图3。
4.2 监测情况
(1)设备安装及校准。项目选用单台超高频雷达RISMAR-U开展监测工作。
2019年10月13~14日在左岸完成基座选址及供电线路等查勘工作,由于前期考虑到电源供电以及调试方便等,将仪器选址在纵向围堰顶戗堤轴线上游12 m处,与最后形成的龙口方向重合。安装后按仪器使用规程,利用校准天线对其进行调试。
2019年10月19日晚得到实时流速场分布数据,与ADCP实测数据对比后发现侧扫雷达计施测的流速偏小,原因如下:仪器对测验河道的顺直条件和水流分布条件要求较为苛刻。在截流过程中,龙口形成后,流场呈现流速变大且流向随龙口推进方向改变等复杂多变的特点。雷达计扫测范围内的流场分布需满足仪器原理所需要的顺直流场,因此仪器需距离龙口足够近,且高度足够低,且雷达天线朝向需时刻与流场方向垂直。
综上,改进了安装方案,雷达计重新选址在右岸纵向围堰下方前期建筑残余的土堆上,其高程约为30 m,距水面高度3~5 m,距龙口右岸约5 m。另外,根据仪器测验原理,其天线朝向必须时刻调整以保证垂直于断面流向。具体调整方法为:根据电子浮标在同一时间段内多次施测的龙口流速路径计算断面流向与戗堤轴线的偏角,根据三角形相似原理以此偏角修正天线朝向,修正频次视流向改变速率而定,即是以戗堤推进的施工进度而定。具体安装及修正情况如图4所示。
(2)儀器基本参数设置。仪器测量距离范围为400 m,扇面范围的圆心角角度为120°,距离分辨率为10 m,每间隔10 m测量1组表面流速,监测频次约20 s施测1次。根据侧扫雷达测得的回波信号,经应用程序软件滤波处理后,截取龙口附近区域信号进行流速流向计算,得到整个龙口区域的流速分布图,再从中选取最大流速数据与ADCP实测数据、电子浮标及无人机载电波流速仪施测数据进行对比分析后上报信息中心。
(3)监测资料。自2019年10月20日08:00开始,经与ADCP数据对比,侧扫雷达计已工作正常,能实时得到正确的龙口附近区域流速场数据,截止25日17:00,侧扫雷达共收集129 h流速数据。侧扫雷达主要监测成果见表2。
4.3 应用优化方案
(1)单站设站方式的优化。采用单站方式布置的侧扫雷达系统,由于只有1组测量数据,只能施测区域内流速矢量的一个分量,即不能完整施测流场的流速分布情况。从测验断面来看,只能测量表面流速垂直于断面的分量,不能测量水平分量。因此,虽然单站雷达也能覆盖扇形区域,测量每个位置的径向流速,但在映射到测验断面时,只有一个统一的角度旋转。当表面流速紊乱时,单站侧扫雷达不能较好测量流速实际情况,数据不稳定。
单站方式一般适用于区域流场平稳、顺直的河段,流向相对均匀,可以根据断面实际情况,将侧扫雷达所测的径向流速数据统一旋转到正确的水流方向,就能够真实反映监测现场的流场分布。如果现场流速流向比较乱,且只能以单站方式设站时,可以考虑以下途径加强合理性分析,优化解算方法: 通过编写小软件,直接处理侧扫雷达原始数据文件,旋转不同角度,得到不同的矢量流场,结合现场情况,按照流场流速变化规律,分析确定各个小区域的流场,将不同的小区域流场组合为最终的侧扫雷达监测流场。
(2)监测流速处理。当水面流速较大(一般大于2 m/s)时,由于受到水面横向波动、船舶等因素的干扰,目前采用的侧扫雷达系统数据处理软件还不能较好地消除干扰,实测的水面流速可能会偏小。
5电子浮标监测龙口水面流速
5.1 工作原理
电子浮标主要用于自动化监测水面表层的流场情况,是一种集RTK定位模块、无线通讯传输模块、wifi模块等为一体的实时定位通讯系统[4]。电子浮标有漂流设备内置RTK模块,确保定位精度达到厘米级;客户端中加入底图能够直观化定位每一个漂流设备和测量船自身的位置,采用千寻系统用于实时定位;直立式漂流设备在存储自身定位数据的同时,发送数据到远程服务端,数据的安全性得到保障。
主要技术参数如下:
卫星系统为GNSS、GLONASS、北斗;
定位精度单点为2 m,CORS定位为2cm+1ppm;
网络模块为3.5G WCDAM;
入水深度大于0.5 m。
5.2数据分析
电子浮标实测数据可揭示2019年10月24~26日流速变化与龙口附近流速随戗堤口门和落差变化的实际情况:24~25日流速逐渐增大,26日流速已开始逐渐减小,龙口最大流速出现在25日。具体可见表3。根据电子浮标施测龙口水面流态成果,统计计算龙口轴线最大流速与下游水舌处最大流速,总体上,水舌流速大于龙口轴线流速,两者比值平均为1.102,也就是说水舌流速比龙口轴线流速约大10%,水舌距离龙口轴线平均为42.2 m。
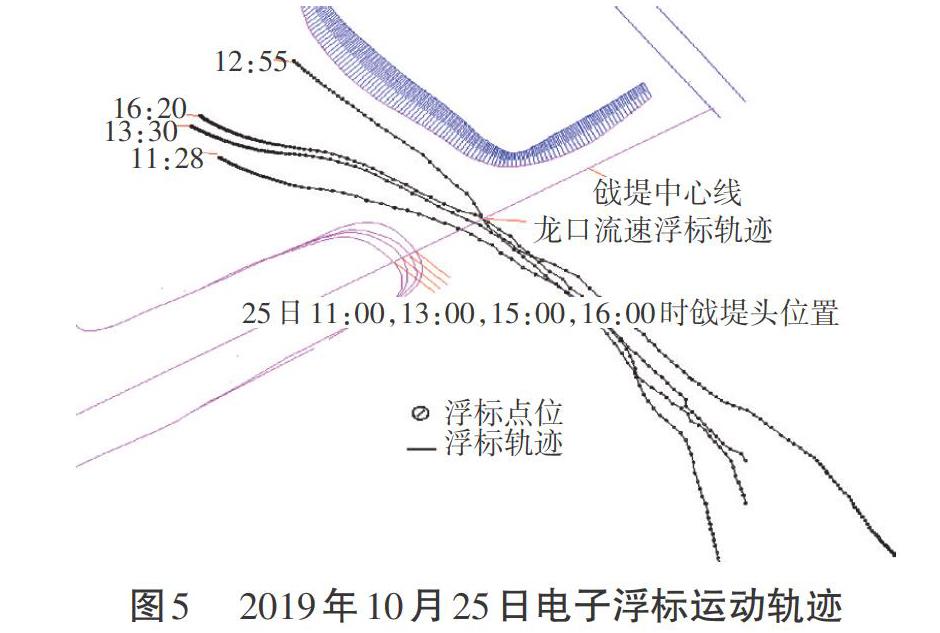
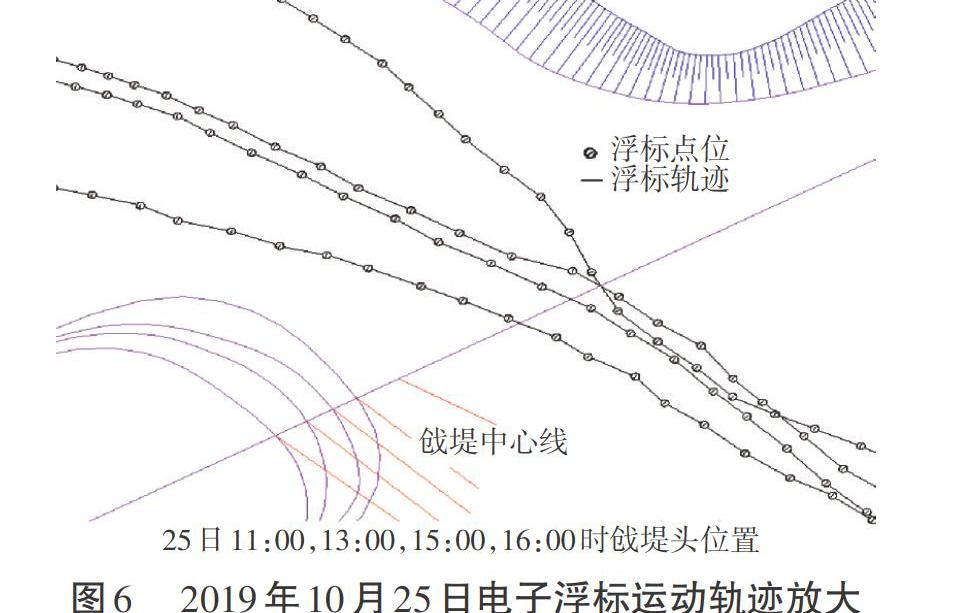
从单个电子浮标运动轨迹来看,在龙口上下250 m范围内,浮标运动反映水流实际变化,受来水、龙口水力因子即河道边界条件影响明显。浮标悬浮在水面(大部分在水下),直立方式向下游运动,真实记录水面流态变化。从数据分析,龙口上60 m左右水流方向开始变化,逐渐向中轴线聚集,最后达到龙口时,基本在宽度约10 m主泓范围继续向下运动,当运动到下游70 m区域,流向又开始散开,并主要向河道右侧运动,并在下游右侧形成局部回流(图5~6)。
從流速变化看,浮标在接近龙口10 m左右区域,流速突然增大约20%,最大流速出现在下游 约30 m区域,与前面流速测量等反映的河段最大流速区域基本一致。
6 应用效果评价及结论
在特殊情况下的流速测验(如截流龙口流速测验)中,受测验环境限制无法使用传统方法施测时,可采用无人机载电波流速仪、侧扫雷达、电子浮标等测验方式,施测结果良好,但同时也存在各自的局限性。
(1)无人机测流系统组装操作简单,能够有效解放人力,提高工作效率,可轻易抵达人力所不及的危险地带开展工作,大大提高安全系数,随时随地开展定点测量水面流速。在本次应急监测中,发现无人机应用中存在不足:①应加入姿态改正系统,通过姿态改正数据获取的理论实测位置更加准确;②应加入成像系统,能够实时确定测流所在位置;③应完善软件系统,将地面控制站与测流系统整合到一起,同时可加入导入自定义底图的功能,能够更有效地开展工作。另外定点悬停受风力影响较大,精度较低,无人机定点位置并非实际测流位置,需要对数据做进一步解算和分析。因此无人机测量对现场人员操作及判断水平要求较高。
(2)侧扫雷达测流系统能不间断实时测得大面积的高精度流速数据,通过形成的流速场成果,可清晰地观察到目标范围内流速场的变化,但仪器安装条件较为苛刻,解算后处理难度较大。需做好仪器选型、站点查勘、测站特性分析、合理安装、建立流量计算模型、比测率定及检验、投产运行相关工作。
(3)电子浮标测流能实时直观地得到流速场中某一条流速线的数据,操作较为简单,且在理论上精度最高。但是在测量中也存在以下问题:①数据通道打开后,不能及时了解数据收集情况,只能等浮标上岸下载数据时才知道采集数据的情况,影响流态及时收集;②设备不灵活轻便,使用中需要一定体力,在投放或移动过程中,显得较为笨拙;③测量中只能了解单一浮标流态轨迹运动情况,不能完整了解河道完整水流变化,耗时较多。
综上所述,3种流速测验方法适用于特殊水情,是传统方法无法施测时的有益补充,效果良好,也都有自身的适用条件和局限性。使用时应因地制宜,视条件变化来选择合适的测验方法。
参考文献:
[1] 伍勇,田苏茂,胡琼芳,等. 大藤峡水利枢纽工程大江截流水文监测数据分析[R]. 宜昌:长江三峡水文水资源勘测局,2019.
[2] 武晶. 无人机水文测流技术应用初探[J]. 水利科技, 2018, 161(4):23-24.
[3] 林思夏,曾仲毅,朱云通, 等. 侧扫雷达测流系统开发与应用[J]. 水利信息化,2019(1):1674-9405.
[4] 刘盾. 浮标测流法在龙口流速测量中的应用[J]. 水道港口, 2017,38(4):99-102.
(编辑:唐湘茜)
Research and application of key technology of velocity monitoring
in river closure gap of Datengxia Hydroproject
TIAN Sumao,ZENG Yali , HUANG Tong
(Three Gorges Bureau of Hydrological and Water Resources Survey , Hydrology Bureau of Changjiang Water Resources, Yichang 443000,China)
Abstract: In November 2019, the main channel was closed for Datengxia hydroproject construction in Guangxi Zhuang Autonomous Region. During the period of river closure, because of adverse velocity measurement condition, the velocity in the gap cannot be measured by traditional ways. Therefore, three measurement methods of UAV radio wave current meter, side scan radar and electronic buoy were adopted. By the new methods, a large number of important parameters mainly containing the velocity in the gap were obtained, which provided an important basis for decision-making of the river closure. The measurement showed good effect and the adaptability and limitations of these three new methods. Generally, three new methods can be used as important substitutions to gain hydrological data when traditional ways are unavailable, and also can be continuously optimized according to the actual situation in the application process.
Key words: gap velocity measurement; side scan radar; UAV radio wave current meter; electronic buoy; river closure; Datengxia Hydroproject of Guangxi Zhuang Autonomous Region
