提升机负荷不均衡控制系统中变频控制技术的应用研究
2021-05-10
(晋能控股煤业集团同家梁矿 山西 037025)
前言
当矿井提升机处于工作状态时,通常装载料斗中转载的物料颗粒不均匀以及深浅不一致等,导致出现料斗重量不一致的现象。此外,由于巷道中坡度存在一定的差异性,轨道宽窄存在一定的不同或者空气阻力等,这些都会将导致提升机负荷出现不均匀的现象,不利于提升机正常工作,严重时将导致提升机出现停止运行。因此,需要探究提升机不均匀的特点,进而对控制系统进行优化设计。
1.控制系统硬件和软件
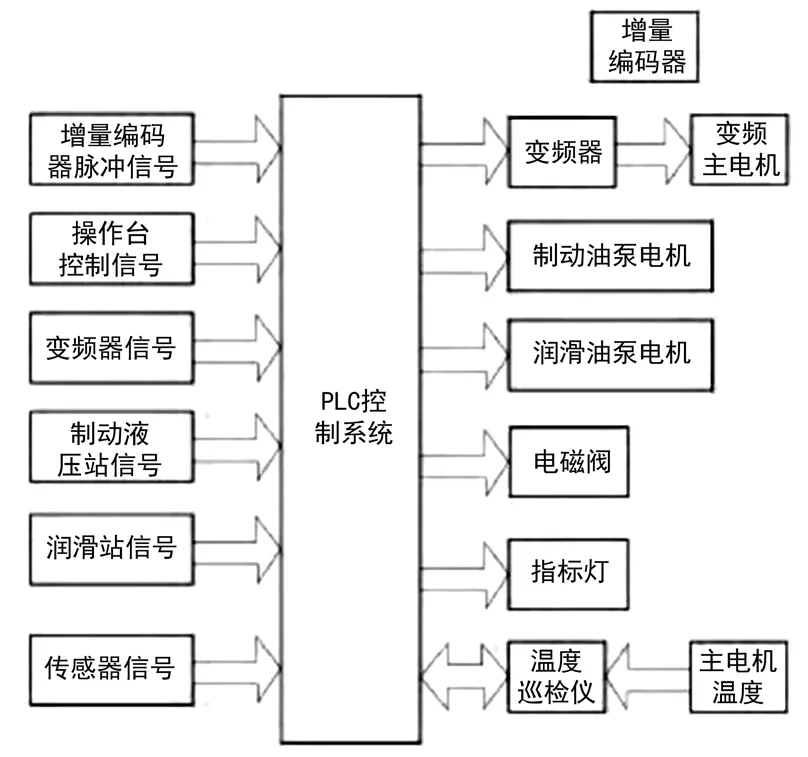
图1 PLC控制系统框图
通过分析我国现行的《煤矿安全规程》对提升机电器控制系统进行设计,如图1表示PLC控制系统框图。
通常PLC提升机控制系统包括如下几个单元:第一,变频器;第二,PLC控制单元;第三,传感器与信号开关等。
(1)变频器选用艾默生CT SPM,可以实现对异步电机参数进行如下操作:第一,自动识别;第二,自适应;第三,整定测试,能够对异步电机的参数进行识别,同时依据内部设置的控制算法进行调整,最终能够对异步电机进行控制。
(2)PLC选用德国西门子57-1200PLC,通常在其内部设有如下几个单元:第一,数字输入输出单元;第二,模拟量输入输出单元;第三,RS422/485通讯单元等。通常PLC开关量输入信号包括如下几个信号:第一,增量编码器方面的脉冲信号;第二,来自于操作台的控制信号;第三,变频信号;第四,来自于制动液压站的信号;第五,来自于润滑站的信号等。与此同时PLC开关量输出信号包括如下几个:第一,制动油泵信号;第二,主电机风扇控制信号;第三,电磁阀中继电器信号;第四,报警指示信号;第五,故障指示信号等等。
(3)在于司机视线信号交互时可以宣红打点信号,给主机电压与电流设置相应的数字电流与电压表,这样可以更好地对其进行检查。
对于软件而言,可以选用模块化以及功能化的形式,从而有利于后期的维护,以及调试等。通常系统程序包括如下几个程序:第一,主程序;第二,初始化程序;第三,高速计数程序;第四,流程控制子程序;第五,数据循环程序;第六,故障处理与中断程序等。
2.控制系统策略
为了能够有效地解决提升机在负荷不均的现象,可以选用如下解决办法:
(1)提升机转速电流采用双闭环矢量控制功能,一般变频器电机有三种控制方式:第一,标量V/F控制;第二,开环矢量控制;第三,闭环矢量控制。通常情况下,闭环矢量控制主要设置一个反馈装置的电机,同时需要在提升机驱动主电机轴上设置一个增量型的编码器,进而可以将信息反馈给变频器,同时可以实现零速满转矩。当选用闭环时,在规定时间内的过载数值大于处于开环状态下的数字。鉴于提升机载荷不均匀的现象,可以通过变频器中设置的转速电流双闭环措施。通常情况下,可以在提升机调速方案必须包含两个调节器:第一,转速调节器;第二,电流调节器。通常将两个调节器串联连接起来,这样可以将转速调节器输出转化成为电流调节器的输入。
(2)电源进线滤波功能。通常可以在电源侧设置进项电抗器,这样能够避免因不平衡造成驱动器出现故障,与此同时对谐波电流进行控制。假如选用额外线路电抗,可以将电抗器压降低到2%范围内。电抗器电流额定值不能驱动连接器输入电流的额定值。对于重复峰值电流额定值而言,规定其不能小于驱动器输入电流的2倍。相应的额外电感计算公式如下:
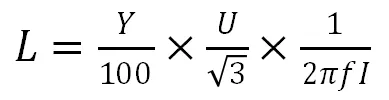
式中:L表示相应的电感,单位为H;Y表示相应的进线电抗器压降百分比,单位为%;U表示相应的线间电压,单位为V;f表示相应的电源频率,单位为Hz;l表示相应的驱动器额定输入电流,单位为A。
(3)能耗制动功能。驱动器可以借助电机进行减速或者采用机械的方式阻止电机加速,从而发生制动现象,这样所产生的制动能量即返回了驱动器。当驱动器对电机进行制动时,驱动器所吸收的功率为驱动器功耗。当处于节电过程中,那么驱动器可以借助PI对制动电机进行控制,PI控制可以对减速时间进行延长,从而可以有效地避免出现直流母线电压超过设定值。假如想借助驱动器降低电机速度,那么可以设置制动电阻器。表1表示相应的40℃制动电阻最小值以及相应的峰值额定功率,其中*表示独立驱动器下的最小电阻值。通常可以将驱动器当做公共直流母线,必须对该数值进行再次设置。假如该线路并未设置直流母排连接,那么相应的电阻值设定在15%以内。当处于连续制动的过程中,那么制动电阻不间断的消耗能量将超过驱动器设定值。通常情况下,制动电阻必须能够负担以毫秒为单位的功耗。假如出现较大的电阻值时,从而可以依据设定的规定有效地降低瞬时额定功率。由于在工作的过程中,制动器启动的次数相对较差。那么相应的驱动器额定功率往往大于制动电阻的额定功率。可是在使用的过程中,制动电阻瞬时额定功率必须满足极限条件下的制动情况。同时在对制动器进行优化的过程中,必须充分考虑制动负载的情况。因此制动电阻阻值必须大于设定的最低电阻值,从而在制动器出现故障时能够有效地起到安全维护的作用。假如电阻值过高,那么将出现制动效果不佳的线性,从而严重导致驱动器出现故障。

表1 40℃时制动电阻最小阻值及峰值额定功率
(4)变速器的调速以及相应的精度,在编码器中变频器设置有带速编码反馈闭环控制系统,从而可以满足各种范围的调速。表2表示变频器开环以及相应的闭环矢量控制的调速范围与精度。

表2 开环与闭环调速范围和精度比较表
(5)具有高速计数功能检测速度,将增量型编码器设置在提升机滚筒轴上面,当接收到编码器脉冲信号时,将其传输给PLC,从而能够借助高速计数功能对提升机的出绳速度进行计算。
(6)电流检测功能,通常可以借助变频器得到电流检测的结果,主要表现为如下两个方面:第一,借助变频器输出端子将模拟量传输给PLC,并且进行处理。第二,借助RS485将数据传输给变频器,并且对信号进行读取。
(7)制动油压恒定功能,通常情况下,制动泵油压主要借助比例溢流阀实现油压的控制,而制动帮油压主要通过比例溢流阀进行控制,同时PLC模拟量可以通过比例溢流阀进行控制。
3.结语
该系统控制的核心为西门子PLC控制单元,同时借助变频器内部设置的闭环矢量实现高精度宽范围的控制,保证提升机平稳的启停,从而可以实现配置制动单元的能量消耗与加减速产生的能量释放。该系统具有如下几个方面的功能:其一,转速电流双闭环矢量控制;其二,能耗制动;其三,电流检测;其四,电源滤波;其五,高速计数等。同时设置各种操作方式,进而操作人员可以依据工艺流程对润滑泵、制动泵以及电磁阀的得失电进行控制,从而可以有效地控制速度,实现降耗增效的目的。
经过分析选用艾默生CT SPM变频器,同时选用西门子PLC进行控制,能够较好地处理提升机负荷不均衡的问题,从而能够有效地提高工程效率,最大限度的降低能耗,从而有效地保证提升机安全可靠的运行。