超高频雷达在河流在线测流中的应用探讨
——基于兰溪水文站的案例分析
2021-05-10方益铭李三平谢景滨
黄 健 ,方益铭,李三平,谢景滨, 陈 容
(1.浙江省水文管理中心,浙江 杭州 310009;2.广州和时通电子科技有限公司,广东 广州 511447)
1 问题的提出
河流的实时流量是水文、水资源管理及水利工程中的重要资料,是智慧水文建设中的重要内容。水文信息化依靠传统的水文测验方法如垂线法、转子流速法,是难以实现的[1]。近年来,随着国内水文行业的发展及国外先进测流技术的引进,声学多普勒测流系统(H-ADCP)广泛应用于河流流量测验中,解决了实时测量问题,测验精度高[2]。然而ADCP 需安装在水下,易受到水体中高沙或漂浮物影响,同时由于仪器长期置于水中,易附着水生生物,维护成本较高。
为了解决泥沙含量过大、漂浮物过多等情况下,河流流量的在线测量问题,超高频雷达测流系统产生并投入使用。超高频雷达测流系统通过雷达扫描计算江河表面流速,并根据提供的网络数据,通过水位、过流面积、断面表面流速比的数据交互,实现流量数据的网络合成,完成恶劣天气、高水位、复杂水体、应急测量等特殊情况下的流量监测,进一步满足流量实时在线监测的需求[3-6]。
2 超高频雷达测流介绍
2.1 测流原理
目前测流常用的K 波段雷达系统,主要是利用目标对电磁波的反射(或散射)现象发现目标并测定其位置和速度等信息。雷达利用接收回波与发射波的时间差测定距离,利用电波传播的多普勒效应测量目标的运动速度,并利用目标回波在各天线通道上幅度或相位的差异判别其方向。
超高频雷达测流系统利用UHF 波段进行测流时,用到Bragg 散射理论(见图1)。当雷达电磁波与其波长1/2 的水波作用时,同一波列不同位置的后向回波在相位上差异值为2π 或2π 的整数倍,因而产生增强性Bragg 后向散射。

图1 Bragg 后向散射基本原理图
当水波具有相速度和水平移动速度时,将产生多普勒频移。在一定时间范围内,实际波浪可以近似地认为由无数随机的正弦波动叠加而成。这些正弦波中,必定包含有波长正好等于雷达工作波长1/2、朝向和背离雷达波束方向的2 列正弦波。当雷达发射的电磁波与这2 列波浪作用时,二者发生增强型后向散射。朝向雷达波动的波浪产生一个正的多普勒频移,背离雷达波动的波浪产生一个负的多普勒频移。多普勒频移的大小由波动相速度决定。由于重力影响,一定波长波浪的相速度是一定的。在深水条件下(即水深大于波浪波长l的1/2)波浪相速度vp满足式(1)定义:

式中:vp为波动相速度,m/s;g为重力加速度,m/s2;l为波浪波长,m。
由相速度产生的多普勒频率为:

式中:f0为雷达频率,MHz;fB为多普勒频率,Hz;λ为雷达发射电磁波的波长,m。
这个频偏就是Bragg 频移。朝向雷达波动的波浪将产生正的频移(正的Bragg 峰位置),背离雷达波动的波浪将产生负的频移(负的Bragg 峰位置)。在无表面流的情况下,Bragg 峰的位置正好位于式(2)描述的频率位置。当水体表面存在表面流时,上述一阶散射回波所对应的波浪行进速度便是河流径向速度加上无河流时的波浪相速度。即:

式中:为波浪行进速度,m/s;为河流径向速度,m/s;为波浪相速度,m/s。
此时,雷达一阶散射回波的幅度不变,雷达回波的频移为:

式中:Δf为雷达回波频移,Hz。
通过判断一阶Bragg 峰位置偏离标准Bragg 峰的程度可计算出径向流速。
超高频雷达测得断面的表面流速(代表流速),通过建立断面平均流速与代表流速的关系,再将断面平均流速乘以断面面积,即为测量断面的瞬时流量数据。
2.2 适用范围
超高频侧扫雷达测流系统目前可应用于单站式测量系统和双站式测量系统(见图2)。其中单站式测量系统安装在河流一侧,可监测到的断面宽度为30~500 m,数据输出为断面径向流速图;而分装两岸的双站式测量系统,最大测量范围可达800 m,并且可获得测量范围的表面矢量流场图。超高频侧扫雷达RⅠSMAR-U 可应用于以下河流的流量监测中:
(1)未建设缆道,无法使用传统方法进行流速流量测验的河流;
(2)含沙量或者水下漂浮物过多,影响H-ADCP 测量精度的河流;
(3)需要测量河流流速以及流畅动态变化的河流;
(4)包含航道且走航ADCP 或者流速仪无法进行流量测验的河流;
(5)河流数据宽浅,无法应用H-ADCP 测量的河道;
(6)超大洪水河流。

图2 超高频雷达测量系统示意图(双站式)
3 兰溪水文站应用分析
3.1 测站特性分析
兰溪水文站是国家基本水文站,是钱塘江中游控制站,下游70 km 有富春江水力发电厂(日调节),上游2 km 是三江口,受富春江大坝影响,回水可达三江口上游。正常水位下,水面宽约380 m,上游380 m 有兰江大桥,下游450 m 有铁路大桥,下游1 200 m 有金角大桥,流域面积18 233 km2。
目前兰溪水文站的流量测验采用缆道流速仪和走航式ADCP 等仪器设备。
3.2 系统组成及设备参数
3.2.1 设备组成
兰溪水文站安装的超高频雷达RⅠSMAR-U 测流系统由1 个现场野外站和1 个中心站组成(见图3)。现场野外站包括收发天线、雷达主机、计算机和软件子系统,中心站包括计算机、中心站软件子系统。技术参数见表1。

图3 超高频雷达RISMAR-U组成设计图(左)及实物图(右)
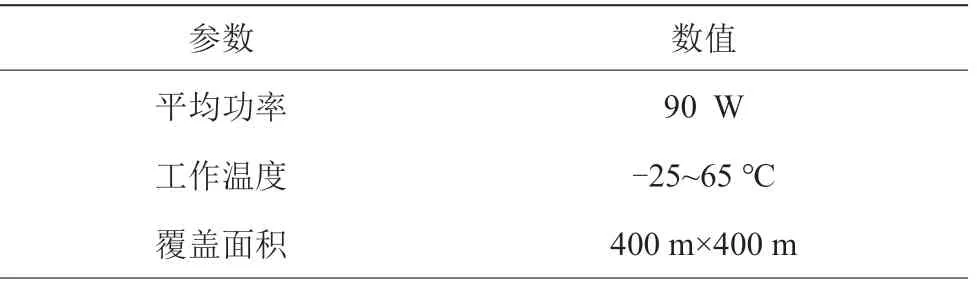
表1 超高频雷达RISMAR-U 技术参数表

续表1
3.2.2 测站安装方案
(1)站点选址:按照水文相关规范要求,测流断面选址要求顺直,河床稳定,水流集中,GPRS 网络信号较为稳定通畅,便于进行数据传输。兰江宽度约400 m(<500 m),在兰溪水文站一侧河岸安装1 套单站式雷达,即可实现河道断面的全覆盖监测。经过谨慎严格的选址,最后选择在水文站上游约100 m 的位置建站。
(2)供电系统:兰溪水文站具备使用220 Ⅴ交流电的条件,雷达系统安装完成后,使用射频线缆连接天线和机箱,接入220 Ⅴ交流电。
(3)测量区域选择:单站式超高频雷达系统理论上可实现全断面表面流速测量,但由于靠近对岸的断面部分回波信号容易受到外界环境干扰,为提高系统准确性,超高频雷达指标流速设置测量范围为距起点40~200 m 区域。
(4)安装情况:兰溪水文站超高频雷达系统于2019年6 月5 日完成安装调试并接入系统,后续接入在线流量监测综合平台,符合SL 323—2005《实时雨水情数据库表结构与标识符标准》及SL 247—2012《水文资料整编规范》要求,适用于南方片数据资料整编自动后处理软件,能与现有系统充分兼容,可用水情信息交换系统进行数据转发等功能。
3.3 比测率定和校验
兰溪水文站采用缆道流速仪数据与超高频雷达在线测流系统采集数据进行率定分析,以超高频雷达施测的代表流速(V代表)与缆道测流所测流量计算出的平均流速(V平均)建立相关关系。超高频雷达测流系统的测速间隔为5 min,为实现超高频雷达与实测流速时间同步,代表流速选取缆道测流时间段区间内超高频雷达测量流速数据的平均值。
本次率定分析资料的获取时间段为2019 年7 月4日—9 月20 日,共38 份缆道测流数据资料参与率定,实测流量变幅为138~10 800 m3/s,流速变幅为0.09~2.32 m/s,水位变幅2.70~10.34 m。本次V代表—V平均相关公式为:y=0.2x2+0.568 3x+0.064 3(见图4)。

图4 兰溪水文站在线流量监测系统率定关系图
4 讨 论
4.1 准确性及合理性分析
4.1.1 准确性分析
为了进一步判断超高频雷达在线测流系统流速定线准确情况,根据定线计算的定线合格率y=0.2x2+0.568 3x+0.064 3,定线相对误差精度≤15%的合格率达到97.06%,满足水文整编规范定线和精度要求(见表2)。对V代表—V平均关系线进行三线检验分析,定线精度指标参照SL 247—2012《水文资料整编规范》,符合规范要求。

表2 合格率分析计算表
4.1.2 合理性分析
选取率定期间高中低代表水位、常规缆道测流法实测流量数据与超高频雷达在线测流系统的35 组流量数据进行合理性对比验证分析(见图5)。在流量变幅为138~10 800 m3/s,流速变幅为0.09~2.32 m/s 范围内,超高频系统计算流量过程线跟常规缆道测流法实测流量过程线高度重合,且与水位变化过程一致,并未观察到数据的跳变等现象,跟河流变化规律相符,超高频雷达测流代表流速推流成果合理,数据可用。

图5 兰溪洪水过程水位流量过程线图
4.2 应用情况分析
4.2.1 系统稳定性分析
兰溪水文站于2019 年5 月引进超高频雷达在线测流系统,6 月完成现场安装调试,开始试运行。在安装试运行期间,系统设定每5 min 出具1 组流量数据。率定期间,系统实现24 h 实时在线连续采集流量数据,具有良好特性。
(1)仪器设备硬件稳定无故障。率定期间,系统硬件设备未出现故障情况,整体稳定性良好。在雷击暴雨等恶劣天气情况下仪器能够正常运行,具有较强的抗环境影响能力。
(2)数据表现平稳。虽然超高频雷达天线与河流流向具有一定的角度,但是回波强度变化过程线未发现突变或间断情况,趋势较平稳。
(3)抗洪水冲击能力强。在洪水期间,探头所在位置漂浮物较多,河流含沙量较大,流速较大,受水流冲击,天线在风力等作用下摆动幅度为0.0°~1.5°,仪器能够抵抗洪水冲击,满足洪水监测的需求。
4.2.2 应用成果分析
超高频侧扫雷达RⅠSMAR-U 系统的每组流量数据,通过14 份流场数据(见图6)筛选得出,相对于ADCP 或者雷达系统,获取的数据量及细节更多。从图6 可看到部分数据缺失,可能是由于现场水面船只和漂浮物对信号的影响[6]。目前兰溪水文站优化了数据后处理系统,通过回波信号的差异区分水面船只和漂浮物,进而通过算法过滤掉这些物体对水体流速测量的影响。

图6 兰溪站超高频雷达测流系统流场数据图
在应用过程中,过大的风速会导致雷达天线不同频率的摆动或者震动,如果震动频率跟雷达波频率相近则会影响雷达波信号,且超高频雷达测量的是水下7 cm 左右重力波的运动速度,风速可能对数据造成一定的影响[6-8]。
5 结 语
由超高频雷达RⅠSMAR-U 系统在兰溪水文站的应用可知,超高频雷达是一种先进、技术含量高的测量系统,系统稳定可靠,数据精度能够达到水文规范的要求,可满足在线测流24 h 无人值守自动化智能化测流要求。
系统非接触式安装,日常运行成本低、维护少、快捷、实时监测,能够解决泥沙含量过大、水下漂浮物过多等情况下流量的在线测量问题,可作为一种新型可靠的测量技术在浙江省乃至全国水文站推广应用,全面提高水文测报的自动化智能化水平。
超高频雷达系统测流数据会受到现场水面的船只、漂浮物或风速等影响,但是通过数据后处理的筛选叠加,能够获取更合理的数据。
