自适应卡尔曼滤波模型的MATLAB编程实现
2021-05-09邓毅李绍建
邓毅,李绍建
(1.安徽省地质测绘技术院,安徽合肥 230022;2.宁波市镇海规划勘测设计研究院,浙江宁波 315200)
0 引言
变形监测是监测变形体建(构)物、基坑位移沉降等安全性的重要手段。变形监测需在建(构)筑物的实际测量中提取关键性数据,从而对建(构)物变形状况进行分析与研究,通过数据分析,剔除不符合规律的测量数据,或者对不可靠的数据进行重测,用可靠、准确的数据,确定建(构)筑物变形的原因,找出建(构)筑物变形是因为地基在建(构)筑物荷载问题还是在外力作用下发生的变形,这样才能针对建(构)筑物形变状态进行有效处理,根据变形的情况和变形的原因,制定相应的补救措施,做到有的放矢。因此,采用什么样的方法对建(构)筑物进行监测与分析,怎样才能确保分析数据的准确性,是我们必须重视的问题。本文通过实例,利用MATLAB编程,建立自适应卡尔曼滤波模型,从而显示建(构)筑物沉降的变化规律。
1 简化的自适应卡尔曼滤波
任何一种分析方法,如果应用了不准确的数学模型或噪声统计特性,将使滤波的性能下降,产生较大的估计误差。自适应卡尔曼滤波就是在进行滤波的同时,利用观测数据提供的准确信息。
考虑随机线性离散系统

式中:xk是系统的n维状态向量;zk是系统的m维观测序列;φk,k-1是n×n维非奇异状态一步转移矩阵;Hk是m×n维观测矩阵;wk-1和vk为相互独立的带时变均值和协方差矩阵的正态白噪声序列。
则Sage-Husa自适应卡尔曼滤波算法可简化描述为:

其中:q̂k、Q̂k、r̂k和R̂k由时变噪声统计估值器递推获得:

式中:dk=(1-b)/(1-bk+1),0 <b<1 为遗忘因子,其取值通常为0.95~0.99。
实践表明,当直接使用该算法时很容易引起发散,从而使得噪声统计特性的估计精度下降。那么,可以简化Sage-Husa 自适应卡尔曼滤波算法,使其对初始值不那么敏感,从而抑制其滤波发散。当观测噪声的稳定性和初始值的精度较高而系统过程噪声的统计特性未知时,可以只对系统过程噪声的统计特性进行估计,即

式中:dk=(1-b)/(1-bk+1),0 <b<1为遗忘因子。
将系统过程噪声的方差估计方程与卡尔曼滤波方程联立,就获得了带过程噪声时变估值器的简化Sage-Husa自适应卡尔曼滤波算法。其计算步骤如下:
2 MATLAB编程实现
MATLAB 编程的实现,具有其强大的数据分析、数据可视化、数值计算能力等特点,且具有易于实现的优越性,MATLAB被广泛应用于测绘领域的数据处理,特别适用于建(构)物的变形监测。
整个算法的实现,其程序实现如下:
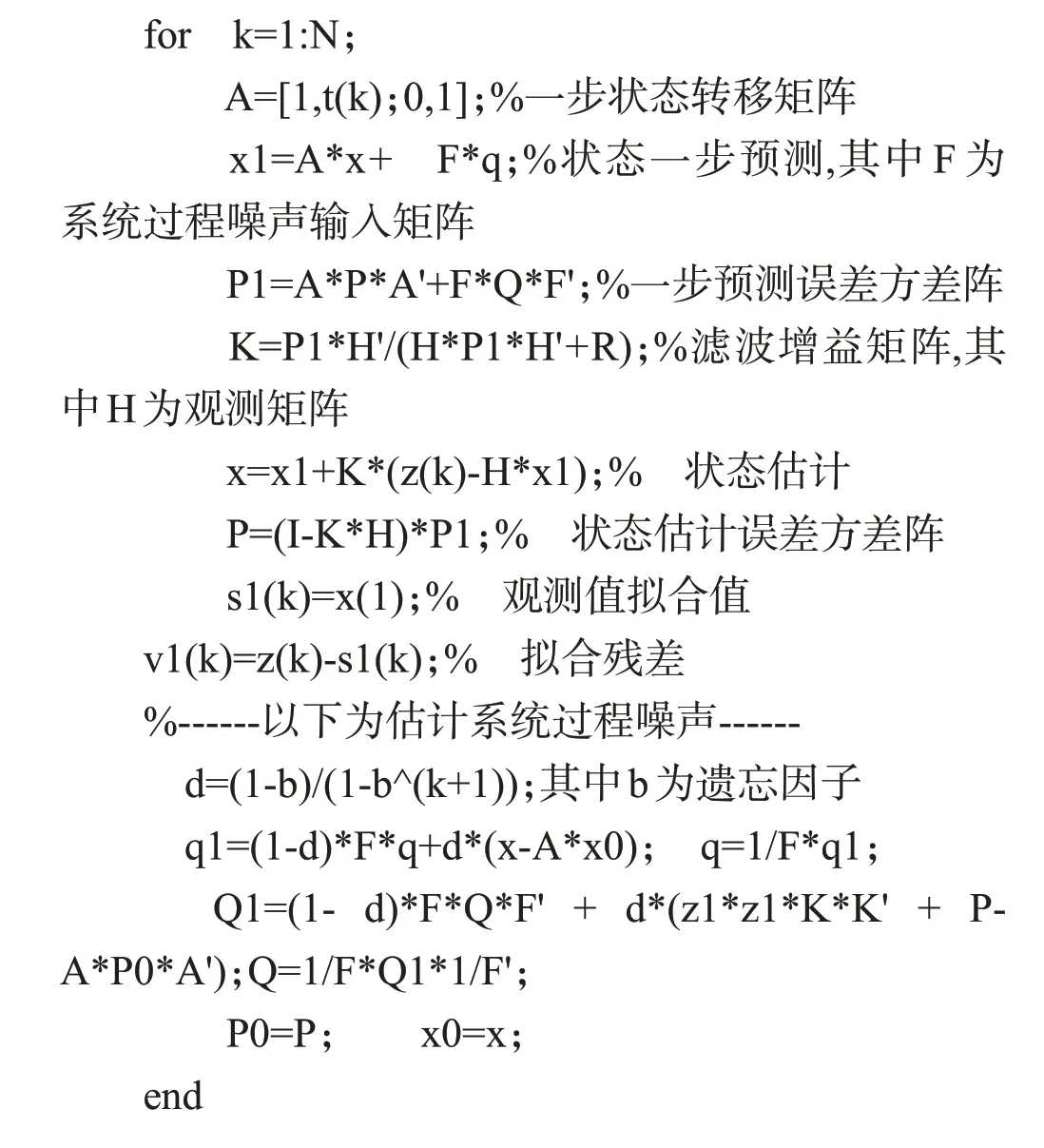
3 案例与分析
以某地住宅楼沉降监测为算例。此监测项目共布设1 个高程基准点、2 个工作基点和6 个沉降观测点,测量方法、使用仪器与前期一致,增加了观测数据,在不同的数据情况下进行分析。现取F1、F3、F4三个沉降监测点的数据分别进行处理,由于采用的算法不同,也产生了不同的计算和误差值数据,使分析的成果更加可靠。
本次计算分析,仍沿用前两期沉降量可确定状态参数的初始值,从第三期开始进行滤波处理。同时,取遗忘因子b为0.98。
采用自适应滤波结果,F1、F3、F4 三个沉降监测点结果分别列于表1、表2、表3。

表1 F1号点累计沉降量与相应的滤波值Table 1. Cumulative settlement at point F1 and corresponding filtering values
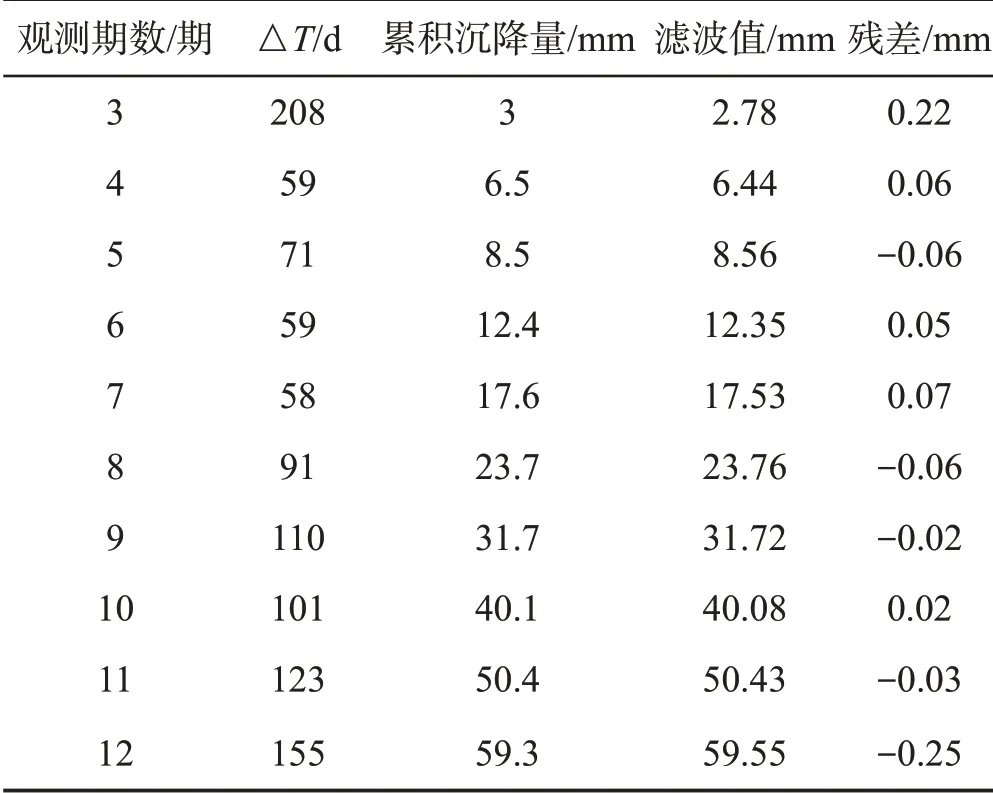
表2 F3号点累计沉降量与相应的滤波值Table 2. Cumulative settlement at point F3 and corresponding filtering values

表3 F4号点累计沉降量与相应的滤波值Table 3.Cumulative settlement at point F4 and corresponding filtering values
从表1~3可以看出,自适应卡尔曼滤波值与原始观测值基本一致,变化趋势亦一致,其残差较小,均小于1mm,最大仅为0.50mm,呈正态分布,表现出很强的随机性。
4 结语
自适应卡尔曼滤波模型,通过MATLAB 编程实现,能真实地、较好地模拟建(构)筑沉降这一动态系统的变化趋势,可以有效地改善监测数据的精度,从而为建(构)筑的安全防范措施的制定提供可靠的分析数据,为制定完善、切合实际的维护方案提供支持。
