AI捡球机器人
2021-05-08章明干


章明干 浙江省临海市大洋小学教育技术中心主任,临海市优秀教师,临海市小学信息技术学科带头人,临海市教学能手。全国青少年创意编程与智能设计大赛优秀指导教师,全国中小学机器人教学暨创客教育展评活动优秀指导教师。辅导学生参加全国中小学生电腦制作等活动,7人分别获全国一、二、三等奖,有20多篇文章发表在《无线电》《爱上机器人》等杂志。
教学背景
创客教育以项目式学习为主要学习方式,学习者通过项目式学习来完成学业,获得知识与技能,同时获得创新能力的培养。而项目设计的来源最好与学生密切相关,能解决学生学习、生活中遇到的一些实际问题,让项目围绕问题解决来实践。学生在这个过程中学到的所有技能都会经过实践内化为自己的能力。
本项目的主题是“AI捡球机器人”,作用是帮助人们捡拾掉落在地的乒乓球。项目的功能要求:一是可以通过遥控的方式控制机器人捡拾乒乓球,可以让学员一边玩一边捡乒乓球,这样不但能实现捡球的目的,也可以让学员在休息的时候玩得尽兴,劳逸结合;二是增加人工智能技术,让捡球机器人能自动识别、追踪、捡拾乒乓球,并增加自动避障功能,避免“撞墙”事件发生。
教学目标
知识与技能 了解麦克纳姆轮的转动方向与小车的运动方向之间的关系,掌握AI视觉传感器的使用方法;学会利用Mind+软件来编写相应程序,控制捡球机器人。
过程与方法 通过小组合作的方式,运用以前学习的相关知识与技能,开展AI捡球机器人项目学习与探究。
情感态度与价值观 通过项目的制作,感受智能控制在生活中的应用及对人类生活的影响,培养创新精神,提高探究欲望。
教学重点与难点
教学重点 AI视觉传感器的使用,micro:bit主控板之间的通信,以及麦克纳姆轮的转动方向与小车的运动方向之间的关系。
教学难点 AI视觉传感器的使用。
教学准备
micro:bit主控板2个,micro:bit电机驱动扩展板1个,AI视觉传感器1个,超声波传感器1个,micro:bit GamePad遥控手柄1个,360度舵机1个,995舵机1个,TT电机4个,麦克纳姆轮4个,杜邦线及附材、椴木板切割部件若干。
教学过程
一、项目导入
教师用PPT给学生展示一组乒乓球馆中学员练球的图片。
师:我国有许多人从小开始学习打乒乓球,而在学习打乒乓的过程中,为了节约时间,通常会准备较多数量的乒乓球,全部打落在地后,集中捡拾。通常情况下,散落各处的乒乓球需要人们弯腰一个一个地捡,或者使用简单的捡拾工具,既浪费时间又消耗体力,有没有更好的方法呢?
学生小组讨论如何制作一台自动捡球的机器人,它有哪些功能(控制方式、捡球方式等),并在纸上画出草图。
二、项目分析
确定项目主题后,请学生分解项目实施过程,主要从项目作品需要具备哪些功能、如何实现该功能、要用到什么材料、完成这些功能需要学习的知识和技能等方面进行分析。
教师再依据各小组的分析情况,总结归纳出学生普遍存在的问题,在项目具体实施过程中着重进行讲解。
三、项目制作
师:项目作品的制作是核心环节。在制作过程中,我们会遇到一些平时没学过的知识和技能,下面我们就一起来学习。
1.麦克纳姆轮的转动方向与小车的运动方向之间的关系
麦克纳姆轮与普通轮子的区别在于麦克纳姆轮旋转时,由于存在斜向的从动轮,会同时产生一个斜向的力。我们控制轮子旋转的速度与方向,将斜向的力增强或抵消,从而实现小车的全向移动,这样就能完成横移、斜方向移动等普通小车无法完成的高难度动作。轮子的转动方向与小车的运动方向关系如图1。
先把4个TT电机接在扩展板相应的位置,再把4个麦克纳姆轮插在电机上,最后在Mind+软件上编写前进的程序。
上传程序后进行测试,如果有轮子没有向前转动,不需要修改程序,只要把相应电机与扩展板连接的两根线交换位置就可以。
2.micro:bit主控板之间的相互通信
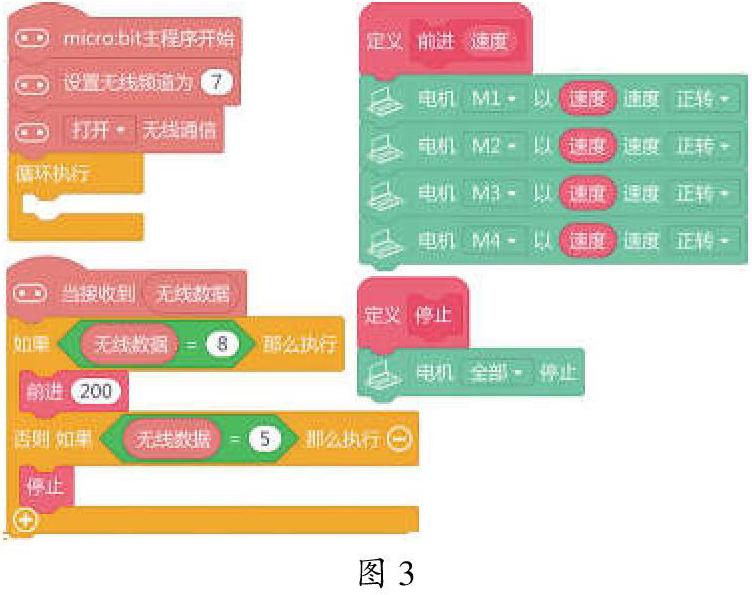
要想利用micro:bit GamePad遥控手柄来控制机器人的行走,我们必须学会如何让它们进行通信。micro:bit主控板自带无线通信功能,编写程序的时候,我们把它们的无线频道设置成相同的频道就可以通信。遥控器上micro:bit主控板的程序如图2,当按下UP键(P8引脚)时,就会发送一个字符“8”;而当遥控端松开按键后,就会发送一个字符“5”。
机器人上的主控板接收到无线数据8时,就让机器人前进;接收到无线数据5时,就让机器人停止前进,程序如图3。
3.AI视觉传感器的使用
要想让机器人自动识别、追踪乒乓球,我们可以利用AI视觉传感器来实现。首先让AI视觉传感器认识乒乓球,我们可以拨动AI视觉传感器左上角的“功能键”,如图4,把它切换到物体追踪功能。再把乒乓球置于屏幕中间的黄色方框内,按住右上的“学习键”进行学习。在学习的过程中不停地移动AI视觉传感器,从不同的角度和距离持续学习乒乓球,屏幕上的黄框会标注“学习中:ID1”,表示AI视觉传感器一边追踪物体,一边学习,这样设置有助于提高物体追踪的能力。松开“学习键”结束学习。
学习完成后,我们再把AI视觉传感器接在扩展板上,并且编写相应的程序上传到micro:bit主控板,如图5。
上面的程序是获取乒乓球在屏中的坐标位置并利用串口打印出来。我们知道乒乓球的位置后,可以再根据它的位置让机器人作相应的行走,以达到捡拾乒乓球的效果。
学生学习了相关的知识与技能后,再动手进行作品制作。制作过程中,教师进行有针对性的辅导。
四、交流分享
教师邀请各学生小组分别上台介绍本组制作的作品,从作品的名称、小组分工、作品功能、制作过程、作品演示、自我评价等方面进行介绍;然后由各组对作品进行评价,投票评选出优秀作品;最后由教师针对学生的项目制作过程和项目的完成情况进行点评,给出指导性的意见,把各组学生在制作过程中遇到的普遍问题整理归纳,着重进行讲解,并根据已经完成的作品引导学生创新,培养学生独立思考和勇于创新的意识。
教学反思
本项目以学生真实生活中遇到的问题为切入点,更容易让学生接受,会使项目更有质感,学生依托所学的知识和技能解决生活中的实际问题,会更加主动地学习。在项目的实施过程中,学生不但掌握了micro:bit主控板间的通信、AI视觉传感器物体追踪等知识和技能,还为进一步学习人脸识别、物体识别、颜色识别、巡线、标签识别等人工智能技术打下了基础。除此之外,学生的创新能力以及实践能力也充分得到了锻炼。
(本课件由DF创客社区推荐)
