遥测设备无依托定位与定向方法研究
2021-05-08
(太原卫星发射中心,山西忻州 036300)
0.引言
随着国家航天发射能力的不断提升,对测控设备的应用及机动能力提出了更高的要求。传统方式下,测控设备完成任务需要依托的附属条件较多:设备场坪、点位大地成果、方位标、标校塔等。其中,点位大地成果和方位标值的获取需协调大地测量人员进行测量,存在测量过程复杂、结果输出慢、基础建设需要一定的费用等问题[1]。这些问题与测控设备无依托方式下参加快速机动任务已不相适应,极大阻碍和限制了测控设备无依托作战样式的应用。
本方法主要是在遥测设备无依托方式下参加快速机动任务时,通过手持定位仪器对设备点位大地成果进行测量以达到设备定位的要求,利用北极星及“两点定向法”对设备进行指北修正以达到设备定向的要求。上述方法的运用,可以实现遥测设备无依托方式下设备定位与定向,大幅缩减准备时间、建设费用、作战力量等的投入,极大提高遥测设备的无依托作战能力。
1.无依托定位
遥测设备无依托方式下定位,主要是利用手持定位仪器对天线转轴中心点的经度、纬度和高程进行测量。根据手持定位仪器的精度,计算定位误差引起设备跟踪目标时的角度偏差值,当该偏差值满足设备自跟踪指标要求时,可以用此种方法进行设备定位[2]。具体实现方法如下:
手持定位仪器选择集思宝G390,定位精度≤5m。假设,天线转轴中心点的定位误差为最大值5m。如图1所示,目标飞行过程中与天线转轴中心点的距离越小时,定位误差引起的角度偏差值越大。反之偏差值越小。
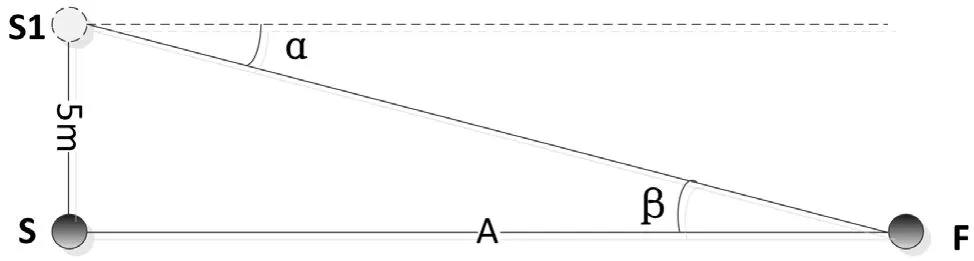
图1 定位误差引起角度偏差示意图
图中:F点为目标飞行过程中的某点,S点为天线转轴中心的真实位置,S1点为手持定位仪器测量的天线转轴中心点位置(最大偏差5m),A为目标至天线转轴中心点的距离。由图可知,定位误差引起的角度偏差为α,其值等于角β,即:
α=β=tan-1(5/A)
当α=β=arctan(5/A)=1.05°时,可以得出:当目标飞行过程中与天线转轴中心点之间的距离大于272.8m时,定位误差引起设备角度的变化均小于1.05°,满足设备自跟踪指标要求。
实际过程中,遥测设备与目标的距离通常大于2000m,因此遥测设备定位可采用同精度的手持定位仪器进行测量。
2.无依托定向
遥测设备无依托方式下定向,可采用两种方法:一是利用软件查询北极星相对于天线转轴中心点的方位角和俯仰角,从而以北极星为方位标进行设备定向;二是通过测量参考物(建筑物、树木等)和天线转轴中心点的经度、纬度和高程,计算参考物相对于天线转轴中心点的方位角和俯仰角,当测量误差引起的角度偏差满足设备自跟踪指标要求时可用此种方法进行设备定向。
2.1 利用北极星进行设备定向
利用北极星进行设备定向,即使用天文软件实时获取北极星相对于天线转轴中心点的方位角和俯仰角,利用该方位角和俯仰角即可完成设备定向。如图2所示。
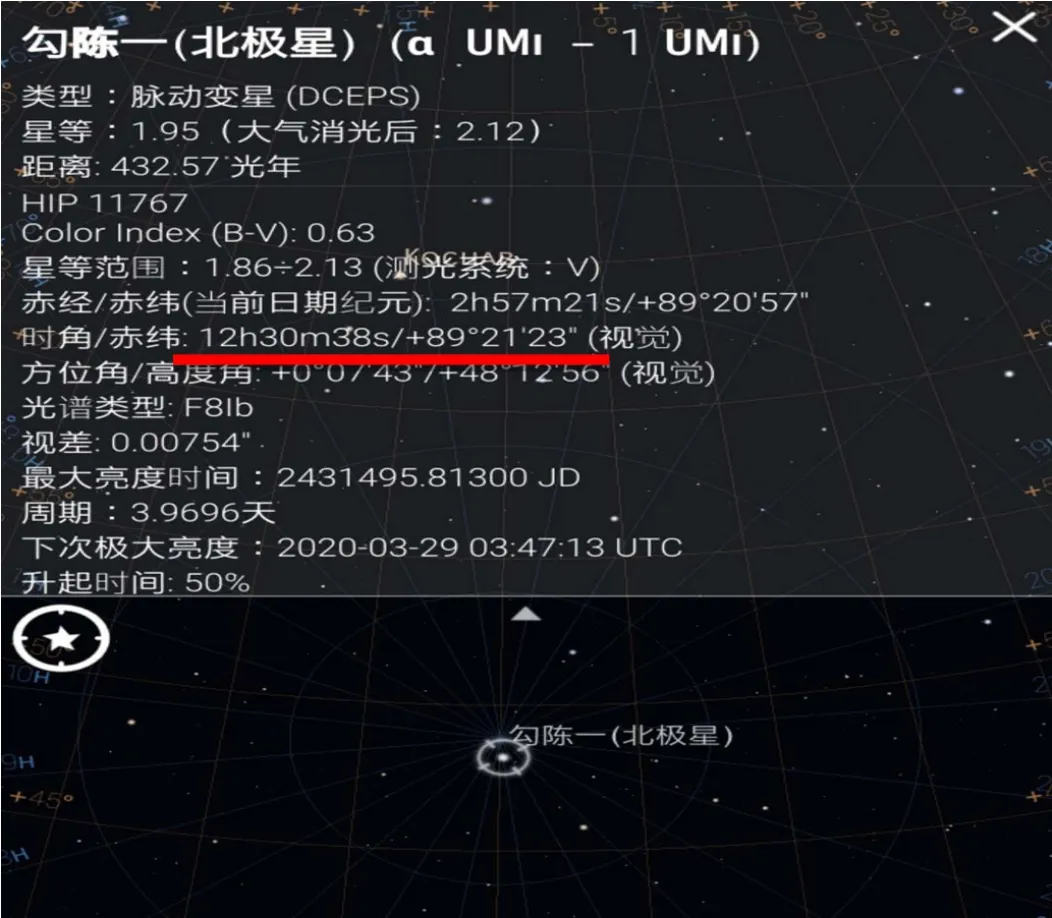
图2 某天文软件界面
具体方法:
第一步,利用天文软件获取北极星相对于天线转轴中心点的方位角和俯仰角,并将天线俯仰转至该俯仰角;
第二步,朝北极星方向转动天线方位,当北极星、人眼均在天线垂直方向龙骨的平面上时,停止转动天线;
第三步,从望远镜中观测北极星,当未在视场内发现北极星时,方位左右扫描(一般不超过10°),直至发现北极星,而后转动天线将北极星置于望远镜正中心。读取此时的天线角度,结合天文软件实时显示角度,计算设备指北修正值;
第四步,重复3~5次,减少人为误差,提高测量精度,完成设备定向。如图3所示。
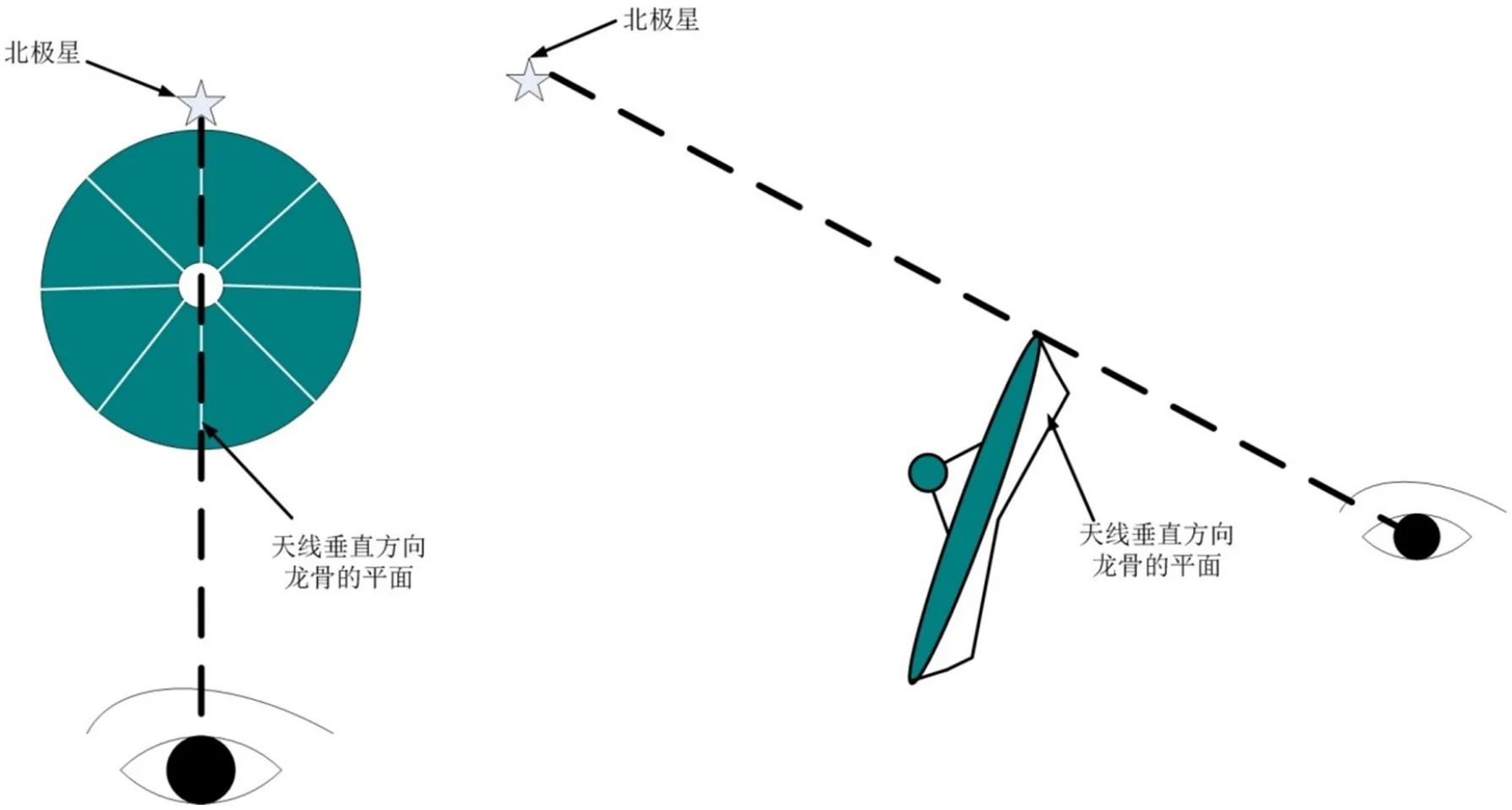
图3 利用北极星进行设备定向示意图(背面、侧面)
2.2 利用“两点定向法”进行设备定向
利用“两点定向法”进行设备定向,即利用手持定位仪器测量参考物和天线转轴中心点的经度、纬度和高程,经过坐标转换与软件编程,计算出参考物相对于天线转轴中心点的方位角和俯仰角,当测量误差引起的角度偏差在设备允许范围内时,利用该方位角即可完成设备定向。
手持定位仪器选择集思宝G390,定位精度≤5m。假设,天线转轴中心点与参考物定位误差均为最大值5m。如图4所示,参考物与天线转轴中心点的距离越小,定位误差引起的角度偏差值越大。反之偏差值越小。
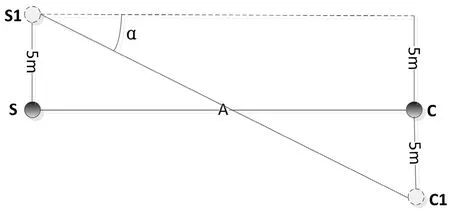
图4 定位误差引起角度偏差示意图
S点为天线转轴中心的真实位置,S1点为手持定位仪器测量的天线转轴中心点位置(最大偏差5m),C点为参考物的真实位置,C1点为手持定位仪器测量参考物的位置(最大偏差5m),A为参考物至天线转轴中心点的距离。由图可知,定位误差引起参考物相对于天线转轴中心点的角度偏差为α,即:
α=tan-1(10/A)
以某一遥测设备为例,根据设备自跟踪指标要求的最大角度偏差值进行计算:
当α=arctan(10/A)=1.05°时,可以得出:当参考物与天线转轴中心点之间的距离大于545.6m时,定位误差引起参考物相对于天线转轴中心点的角度变化值均小于1.05°,满足设备自跟踪指标要求。
3.理论比对与需求比对
3.1 理论比对
根据理论计算,无依托方式与传统方式下的遥测设备定位与定向理论偏差如表1所示。

表1 两种方式的理论偏差比较
从表1可以看出,虽然无依托方式下遥测设备定位与定向偏差均大于传统方式下的偏差,但均在设备自跟踪指标要求内。所以,当遥测设备在无依托的情况下参加快速机动任务时,可利用手持定位仪器对天线转轴中心点的经度、纬度和高程进行测量,用作设备站点大地成果值。同时,可以根据实地情况选择北极星或者“两点定向法”进行设备定向,满足任务要求。
3.2 需求比对
根据工作实际,无依托方式与传统方式下的遥测设备定位与定向需求比较如表2所示。
表2 两种方式的需求比较
从表1可以看出,该方法通过利用手持定位仪器对遥测设备进行设备定位,利用北极星及“两点定向法”进行设备定向,可以实现遥测设备无依托定位与定向,大幅缩减建设费用、准备时间、作战力量等的投入,可以全面提升遥测设备无依托作战能力。
4.实际应用效果
4.1 海态区域应用情况
根据海试状态要求,遥测设备需机动至某海域附近在无依托方式下参加此次任务。到达预定海域后,面对全新的作战环境、任务时间临近、无方位标及点位大地成果等现实情况,同时面对天文墩、方位标等的建设需要协调地方部门,协调难度大、建设费用高、耗时长,且未安排专项经费等困难。设备人员立足现实,科学统筹,精心准备,大胆实践探索和应用。利用1h,通过手持定位仪器进行了设备定位测量;通过距离分别为795m和1027m的两处建筑物,采用“两点定向法”进行了设备定向测量。利用0.5h,再次通过北极星对设备定向进行了测量。综合考虑参考物距离较近时测量误差引起的角度偏差较大,设备定向优先考虑北极星修正值。期间遥测设备以训练形式参加卫星跟踪测量任务,实时过程中设备跟踪稳定,任务执行圆满,角度偏差约为0.13°。临近任务期间,岗位人员再次通过北极星进行设备定向修正,至正式参加海上发射任务时,设备跟踪稳定,任务执行圆满,角度偏差约为0.09°。角度偏差曲线如图5、图6、图7所示。
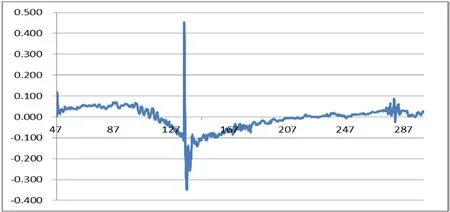
图5 传统方式下的角度偏差曲线(约0.05°)
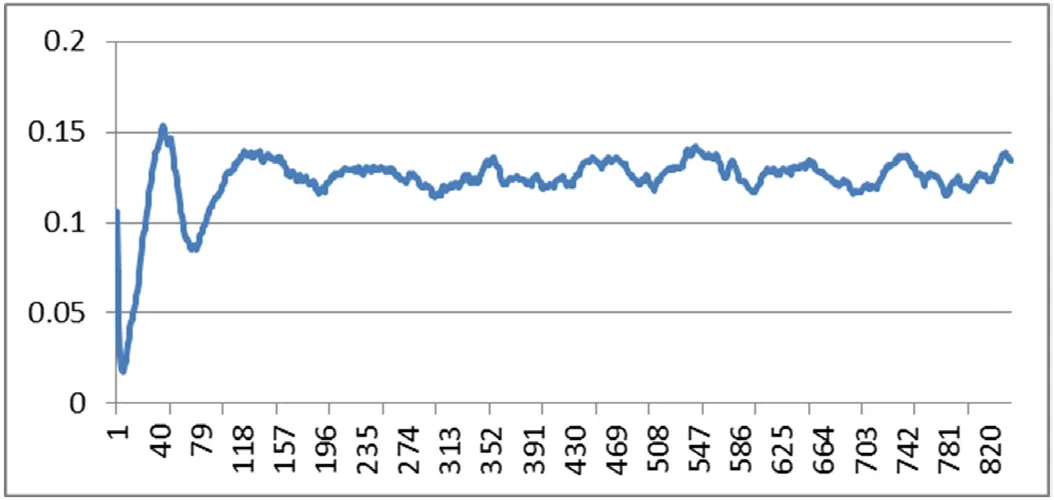
图6 某卫星任务角度偏差曲线(约0.13°)
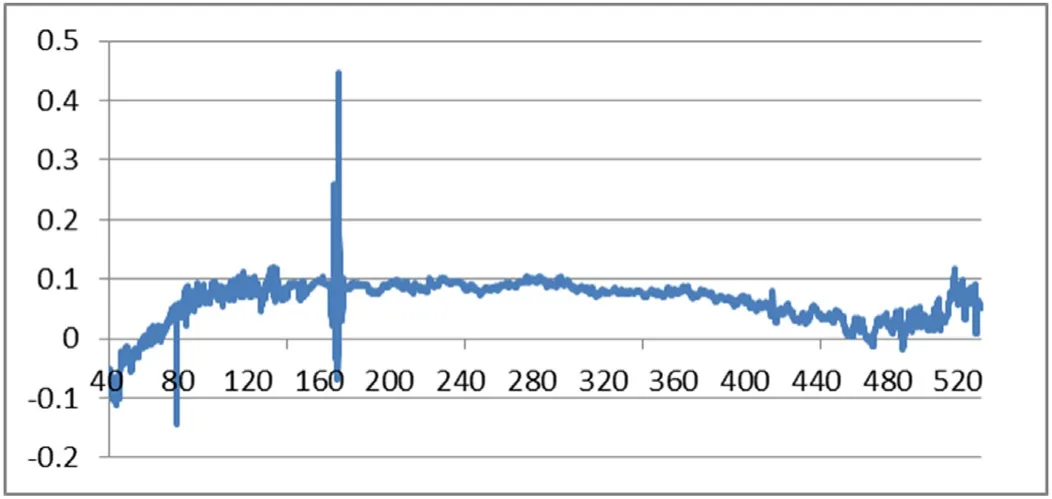
图7 海态发射角度偏差曲线(约0.09°)
4.2 陆基区域应用情况
根据陆基区域卫星任务要求,遥测设备需机动至某点位执行任务。由于前期预设点位理论弹道内有大量遮挡,遥测设备被迫转移至无大地成果及配套方位标的无依托点位。时间临近,且周边没有满足条件的建筑物可以用来进行设备定向。设备恢复后岗位人员短时间内,通过手持定位仪器进行了设备定位测量,通过北极星进行了设备定向测量。实时任务中设备跟踪稳定,任务圆满完成,角度偏差约为0.1°。角度偏差曲线如图8所示。
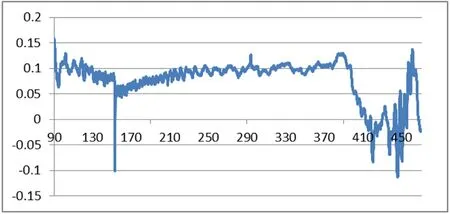
图8 海态任务角度偏差曲线(约0.1°)
通过上述任务执行情况及角度偏差曲线,可以看出遥测设备无依托定位与定向方法在实时任务应用中与传统方式差别不大,实时过程中设备跟踪稳定,任务执行圆满,效果良好,满足遥测设备无依托要求。
5.结语
该方法目前已在遥测设备上进行了3次实战应用,大幅缩减了准备时间、建设费用、作战力量等的投入。通过提高定位精度、增加相对距离等方式,可以对测控设备无依托方式下的定位与定向精度有一定程度的提高,使其达到其他遥测、外测和安控设备等的指标要求,用以保证测控设备完成无依托方式下的任务。该方法的扩展应用,可以全面提升遥测设备无依托作战能力。
