基于创新工程实践能力培养的小型仿人机器人设计*
2021-05-07王升升
王升升
(吉林工业职业技术学院,吉林 吉林 132013)
0 引言
由于受传统教学理念、教学模式、教学方法等因素的制约, 学生自主学习能力较弱已成为制约我国高校教学质量以及人才培养质量的重要因素。很多高校正大力发展学生社团等第二课堂建设,辅助教学,激发学生自主学习和创新工程实践能力。但是在生源质量日益下滑的情况下,高职院校第二课堂和学生社团的开展也面临着很大的阻力,这也使第二课堂建设在促进学生自主学习和创新实践能力的功能上大打折扣。
发展第二课堂培养学生的创新工程实践能力,可以与教学体系和人才培养方案互补,在现有人才培养方案的学习基础上增加个性化工程实践培养,既能满足学生个性化专业发展需求,又能够给予学有余力的同学提高个人专业技术技能的机会。
小型仿人机器人是工业机器人中非常重要的一个分支,在其算法功能、仿人的机械结构、外设传感器的识别功能等方面一定程度上代表机器人的先进程度。工科专业学生要求动手实践能力强,对于专业的理论知识不仅要求真懂、真会,同时要求学生对所学的知识懂得其用途。小型仿人机器人是一个工科专业的交叉体,对专业中的机械结构、控制方法、电动机直流技术、控制算法等都有很深的涉及,适合作为学生创新工程能力培养的实践项目。通过梳理工科专业现有的专业课程,结合创新创业教育的实际,开发了小型仿人机器人工程实践项目。
1 设计思路
小型仿人机器人的设计研发过程中需要掌握和学习多学科的知识和技能,是一个综合类的设计项目。小型仿人机器人的设计的思路是完成小型仿人机器人的机械结构设计、系统硬件设计、软件系统设计,最终进行试验。同时在课程的教学中把机械工程、电路、电子元件焊接、计算机语言等课程有机地结合到一起,通过学生自主预习、自主进行方案设计提出设计小型仿人机器人项目[1]。具体步骤如下:
1)自主学习小型仿人机器人所需理论知识等。
2)在教师带领下自主进行整体机械结构设计。
3)利用自主学习的综合知识进行硬件设计,包括硬件的选型、电路设计和调试等步骤。
4)利用自主学习的综合知识进行软件设计,包括舵机驱动、程序设计、上位机设计和调试等步骤。
通过学生的自主学习进行机械结构的设计,为小型机器人的动作进行自由度的分配,同时进行驱动原件的选择。在硬件系统设计中,选择核心的传感器和CPU,同时进行核心电路的设计[2]。在软件设计中使用插补法等对舵机进行软件控制,使用编程软件进行传感器的驱动设置。通过以上项目让项目组的学生人人有分工、人人有活干、人人能动手,积极培养学生的创新工程实践能力。
2 小型仿人机器人设计
2.1 机械结构设计
小型仿人机器人的机械设计任务分为5部分: 1)机器人自由度的分配。2)机器人在运动过程中选取的驱动原件。3)设计小型仿人机器人的各机械部件,确定结构参数。4)建立完整的数学模型,进行运动学分析。5)完成机器人的组装。具体研发思路如图1所示。

图1 机械结构设计内容
在进一步的设计中,进行机器人的自由度分析,自由度是仿人机器人重要的控制指标,包括机器人整体大小、驱动伺服电机的力矩、机器人的中心位置等[3]。通过确定中心位置把机器人分为上肢与下肢,分别分配自由度。仿人机器人中上肢自由度分配主要是颈、肩、肘、腕四个方面。仿人机器人下肢自由度分配主要是双腿自由度、踝关节自由度、髋关节自由度三方面的分配。下肢自由度的分配关系到仿人机器人的行走方式。仿人机器人的动力源是驱动电机,通过不同电机的对标,选取舵机作为动力电机。舵机的优点是可以反馈位置信号,可以很好分配关节的自由度[4]。
2.2 控制系统硬件设计
在完成机械结构设计后,关键是控制系统的设计。控制系统是仿人机器人的大脑中枢,只有控制系统设计合理才能使仿人机器人正常运动。通过前期的机械设计,确定控制系统硬件的安装部位,机器人的背部空间较大可以安装较多的硬件,如主控板、姿态传感器、通讯模块。驱动电源电池安装在机器人的腹腔[5],如图2所示。
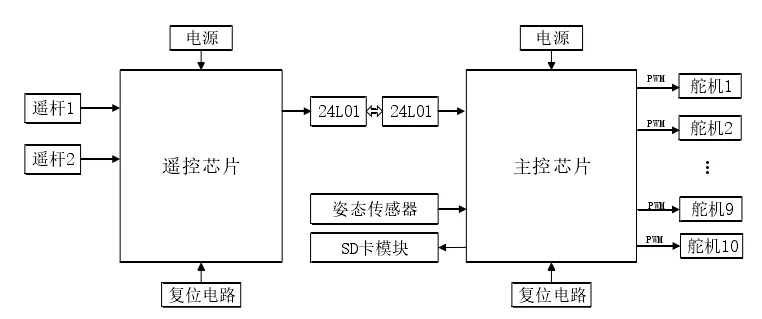
图2 控制系统硬件设计图
2.3 控制系统电路设计
控制系统硬件设计后,需要各个硬件系统进行互联,通过主控的芯片来处理传感器传回的各种数据并进行控制,其控制系统硬件电路设计中采用由上向下的方式进行设计,其核心电路如图3所示。

图3 核心电路
2.4 控制系统软件设计
小型机器人在机械机构、硬件构成、电路设计正常工作的前提下,控制程序是决定小型机器人工作正常的关键。软件系统的设计采用传统的三层,分别为执行层、应用层、驱动层。执行层主要功能为调试、编写动作库,从控制器发送指令;应用层是控制器的软件核心;驱动层主要实现小型机器人的动作和功能,控制指令转换成电机识别的脉冲信号[6]。
舵机是小型机器人的动作控制电机,舵机的控制调速算法采用插补法,通过算法确定舵机的初始位置、运行时间及最终位置,通过调节时间及舵机的角度控制机器人的运行速度。插补算法可以分为两种,分别是定时插补和定距插补。插补调速算法如图4所示。

图4 插补调速算法
由上图可知,运行时间T1=20ms脉冲调整,进行转换为T2=20ms,脉冲宽度增加,增加量为每次△T/n,经过n次后,舵机平稳运行,速度平滑[7]。小型仿真机器人的平稳运行需要多舵机的联动控制,起到串联作用的是控制软件。主要的控制方法为分时细化,通过图4可知运行周期为20ms,将一个周期分为8段,通过平分时间段,每一个时间段控制一个舵机。
2.5 传感器检测
传感器是小型机器人的检测元件,可以进行三轴加速度处理,其驱动核心是MPU6050芯片,可以直接处理传感器输出的陀螺仪和加速度计数据。在工作时其坐标系的定义如图5所示。芯片文字垂直向上以芯片的中心为原点,水平方向为X轴,竖直方向为Y轴,文字垂直向上为Z轴[8]。

图5 MPU6050检测轴方向
3 小型仿真机器人调试
完成机器人的机械结构设计、硬件软件设计之后,进行机器人的硬件调试。通过核心控制器与每个舵机进行连接,测试控制器的控制情况,软件编程及其舵机的运行情况。通过测试,验证舵机在接收到控制器的指令时,能否完成目标位置及其运动时间。舵机运动响应曲线及时间如图6所示[9]。

图6 舵机运动位置及时间
4 结论
小型仿人机器人的设计涉及到多学科知识与实践,学生在实践中能充分的融合不同学科知识,大大提高了学生的创新工程实践能力。同时学生在机器人设计初期的调研,也大大提升了学生分析、总结问题的能力,对于现有学生创新创业具有较大的借鉴作用。