人机环境系统视域下的杂豆种植机改良设计
2021-05-07赵爱丽郭占斌王黎明曲庆峰秦海彬
赵爱丽,郭占斌,王黎明,曲庆峰,秦海彬
(黑龙江八一农垦大学工程学院,大庆 163319)
我国是世界杂豆生产大国,有着悠久的杂豆种植和食用历史。杂豆是一类豆科作物,常见的有扁豆、豌豆、绿豆、蚕豆、豇豆、芸豆、鹰嘴豆等[1]。它是一种低脂肪、高蛋白质含量、富含复合碳水化合物、低致敏性的环境友好型作物[2]。杂豆富含赖氨酸和精氨酸,蛋氨酸和胱氨酸为第一限制氨基酸[3]。其作为一种健康的食物资源,市场需求量十分巨大。目前,杂豆作物在种植方面尚无专用机械,基本靠人力手工播种。传统的人力手工播种,劳动繁重、工序烦琐、播种效率低下、播种质量不均衡[4]。目前,即便采用机械播种,使用的机械设备也都是在主粮作物播种机的基础上进行改装而成或者直接采用。由于专用机械设备的短缺,导致种植粗放,重播漏播、种子浪费、缺苗问题严重。中国提出了到2020 年农业机械化水平达到70%的战略目标[5]。因此,近年来对于杂豆种植机械十分重视,制约其播种机械技术已初步解决,先进播种机械技术的推广使用,能够提高农户经济效益和种植积极性。以人机环境系统为基础对杂豆种植机进行改良设计,通过人—机—环境的协调与优化,使杂豆种植机更能满足农户需求。
1 “人—机—环境”系统架构
在系统中,“人”即是用户是工作的主体,“机”是产品,是人所控制的一切对象,是与人相对而言的物,“环境”是指人与机所处在的特定工作条件,包含社会环境、外部作业空间、物理环境、生化环境等[6]。杂豆种植机的人机环境系统分析要素主要包含三个层次内容:作为外部因素的环境、作为内部要素的人以及作为研究主体的机械。三种要素形成一种可持续的生态系统,互相制约且互相支撑,系统模型见图1。环境的有效分析能够确保机械及人机操控的有效适配,合理的机械外观功能、尺寸比例、材质工艺能够使机械达到满足人的使用需求,而人因分析能够使用户保持较好的心理和生理状态,从而提高生产效率,实现种植作业的准确与可靠。机械产品的设计生产是受诸多因素制约的,尤其是作业环境、作业对象,如此复杂农业机械产品,其设计限制条件更是繁多复杂[7]。研究杂豆种植机的这三种要素,除了研究各要素本身,还要将其至于整体的系统环境之下,不单纯着眼于个别要素产生的影响作用,还要利用三要素之间的有机联系来寻求最佳的创新设计路径。在明确系统总体要求的前提下,着重分析和研究人、机、环境三个要素对系统总体性能的影响,应具备的各自功能及其相互关系,如系统中机和人的职能如何分工、如何配合;环境如何适应人;机对环境又有何影响等问题,经过不断修正和完善三要素的结构方式,最终确保系统最优组合方案的实现[8]。
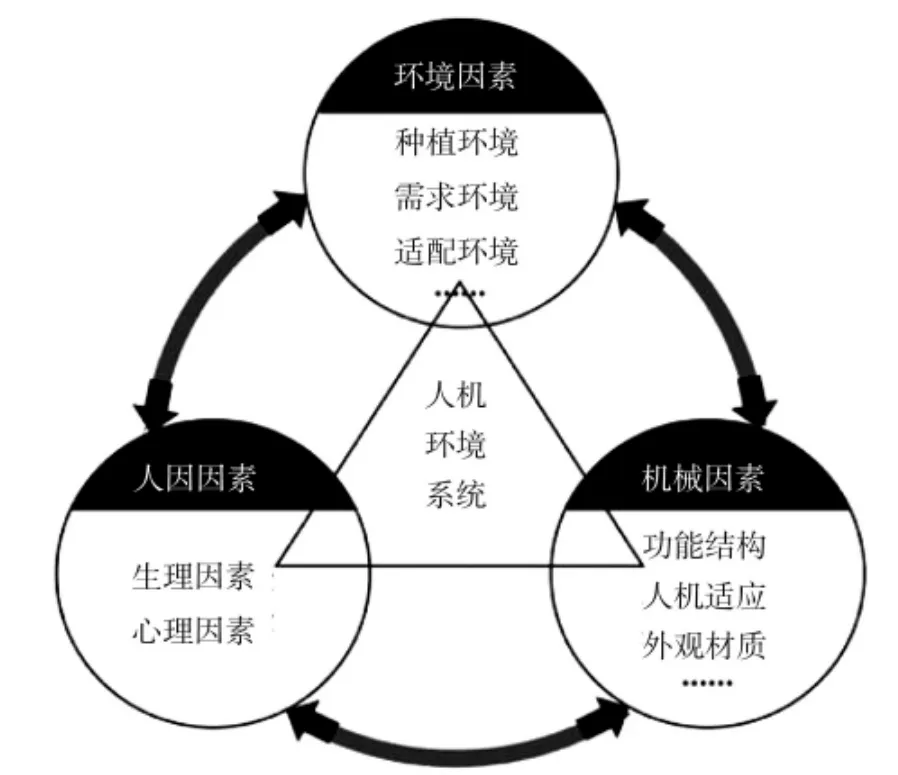
图1 人机环境系统模型Fig.1 Man-machine environment system model
2 杂豆种植机的人因分析
以人为核心的人机环境系统设计思想的主要内容是:将人机环境系统中的人作为设计的主体,人机环境系统及其各个分系统的设计均应按照人机工程的理论和方法,围绕着更好地发挥人的能力、提高人的性能的原则进行[9]。杂豆种植机的核心用户主要是种植户。对于种植户的研究能够使产品达到合理化的操作特点,通过对现有杂豆机械技术的应用,减少种植机操作难度,增加使用过程中的安全性,并最终提高生产效率。对于种植户的分析应该着眼于生理和心理两个方面。
2.1 生理特征分析
在人机环境系统设计中必须考虑人的生理特性,要求在机器设备和环境等因素的作用下人的生理特性参数仍能处于合适的范围内[10]。对用户生理特点的分析,是处理好系统中人机关系的必要和关键环节,良好的造型设计、功能表现、色彩传达能够决定用户的作业姿势与行为适应,通过对于杂豆种植机使用过程中的人体尺寸、动作、态势分析及数据整理,使其达到最为合理、最少疲劳的姿势,从而解决其和人体机能的关系。
人体尺寸决定了人体所占几何空间大小和人体的活动范围[11]。人的主要活动包括坐、站、操作等几个方面,用户对于种植机的操作可以大致分为三类:
(1)1 名用户操作动力牵引机械,操作部位在驾驶室内,操作动作包括:握持、推、拉、踩踏等。驾驶室内的座椅、转向盘、操纵机构、显示器及驾驶空间等各相关尺寸的设计,都是由人体尺寸、操作姿势或操纵舒适程度来确定的[12]。设计要求操控设备如方向盘、控制按钮等能够易于操控,具备合理尺寸、色彩与材料。
(2)用户要能够与控制设备的显示屏进行良好的视觉交互,设计要求显示屏的图形、图像、色彩、文字等界面内容能够醒目且不会产生疲劳和视觉错视,能够使人的头颈等部位的旋转角度能够与放置的位置、角度契合、且触屏控制的交互信息合理。
(3)用户在将杂豆种子填充入排种器时,需要多人配合操作,人体姿势包含站立、扛起、架扶等。1 名用户踩踏至排种器上将种子原料袋托起,其余人员辅助控制种子填充的流量与流速,以防洒漏。设计要求减少此环节操作难度,增加人机辅助部件,使其易于操作,开展模块化设计,可进行填充部件可拆卸、易拆卸。
基于上述操作分类及相应分析,从设计角度导入人因分析定位:
(1)用户在执行播种操作时的性质、频率和难度;
(2)用户在执行播种操作时的身体位置、姿态以及人体尺寸;
(3)用户在执行播种操作时的工作空间尺寸、可活动性增量;
(4)用户在执行播种操作时的视听觉等感知系统;
(5)4 类播种操作中因环境原因需要补偿的尺寸增量。
用户作用于种植机的三类作业形式主要靠上肢和手的操作完成,因此种植机在与人体进行交互的过程中会设计的主要动作包括:抓握、按、拉、提等,为了使用户在操作机械的过程中能够更加便捷且处于较为舒适的状态,就要针对人体在站姿下操作种子投放、坐姿下进行动力牵引、查看和操作控制设备等因素进行分析和研究。从生理学角度出发,站立的人从裸关节、膝关节到臀部都有一些肌肉处于静态受力状态,一旦坐下就解除了这部分肌肉负荷,从而降低了人的耗能,减轻了血液负担[13]。在设计过程中,为了保证种植操作的高效率,要求各种机械作业部件都处在人体不活动时手足所能涉及的范围之内,为了保证操作者的舒适和不易疲劳,必须使人的操作活动处于人体各部位舒适姿势的调节尺寸范围内,人机工程学设计标准[8],规定了人体各部位舒适姿势的调节范围,详见表1。种植机与人之间的行为交互过程需要符合标准,在设计构建过程中构建人机舒适区,结构设计、功能设计、尺寸规范要以表格数据范围相匹配,已达到最优的结果。

表1 人体各部分互动范围及舒适姿势调节范围Table 1 Interaction range and comfortable posture adjustment range of each part of human body
分析播种机的作业方式,要考虑其操作姿势的不同,所消耗的身体能量也存在着很大的差异,就种植机与人体交互的主要动作—种子原料的投放等,整个从过程使将种袋抬起到举重过肩,整个过程中要消耗大量的体力,其耗能范围约为4.0~16.2 kcal·min-1,且随着活动度的增加。人体的肌肉活动程度也就越大,如图2 所示。基于这一分析,考虑将种植机的种箱位置进行重新设计,可应用模块化设计方式或改变其结构角度、外观造型等,使其更加适合人体结构和行为过程,提升操作方式的便捷性,减少人体能量消耗及其可能带来的身体损伤。
2.2 心理特征分析
从人的心理特点出发,人与种植机的交互可分为三个主要阶段:
(1)在种植机的使用前,也就是购买阶段,用户在甄选产品的过程中主要是依据其外观造型所体现出的形态结构、材质质感、工艺精度、色彩信息等认知媒介作出判断,并通过整机或部件的外观形态所呈现出来的美学信息推测其机械的基本用途和操作方式。在这一过程中会通过心物刺激形成视觉反馈,形成心理判断,设计趋向应以人机及技术美学的提升为主。

图2 种子投放操作轨迹动势分析Fig.2 Dynamic analysis of seed placement operation track
(2)在种植机的使用过程中,用户对种植机的功能反应、人机体验、界面美感、操作体验等方面的信息有了直观的认识,并能够对种植机的操作感和舒适感等感官认知做出清晰的判断并呈现出相应的行为反馈,设计趋向以人机舒适度及操控作业的宜人性为主。
(3)在种植机的使用后,用户对机械的播种效能、人机美感等方面的内容有了明确的定位,这也是种植机设计的关键环节,用户的满意度高低在此时能够达到关键值,并形成有效心理反馈,并体现出用户的价值心理,这一阶段尤以细节的优化趋向为主。基于上述分析,在进行种植机的改良设计时要注意把控和匹配用户各个阶段的心理需求和预期,设计结果要操作简单、功能合理、识别清晰,形态简洁,符合用户作业习惯、增强形态美感,提升使用效率。

图3 人因心理系统模型Fig.3 Model of human psychological system
3 机的分析
3.1 种植机单元分析
种植机进行播种,根据农民所种的农作物,播种深度、株距、行距等都有严格要求[14]。目前,市场上较为常见的杂豆种植机主要是用于主粮种植的改造型机械。杂豆机械相较于主粮机械的不同主要在于排种器播种盘的优化设计,杂豆包含绿豆、红豆、芸豆、黑豆等,尺寸大多为3.0~1.5 mm 之间,相较于主粮播种盘的单一尺寸则需要更多的细节优化,其他部件则与主粮播种机相近相似。基于农田空间差异的变量施肥播种技术是精准农业技术的重要组成部分[15]。因此,基于主粮如大豆种植精密机械可做如下分析:种植机包含排种器、播种单元、控制单元、液压单元以及动力牵引机五个部分。排种器是种植机的核心工作部件,按照工作原理,排种器可以分为机械式和气力式两种,是种植机的核心工作部件和技术革新重点;播种单元具备开沟、限深和导种功能;智能控制作为机械的主脑,具备感应反馈、伺服驱动、变量控制等功能;液压控制单元则具备机架液压折叠、快速变行距、侧牵行走的功能,而动力牵引装置则可以依据播种单元的大小进行模块化匹配,并承载人与机交互的核心部分。
3.2 人机分析
依据人机环境系统中杂豆机械的功用和技术推演,分析以人和环境为动因和制约,机械设备的不同作业单元与人、环境之间的关系,能够为我们提供必要的设计支持。用户对于种植机的操作,发生直接联系的仅有部分单元组件,通过图表分析能够清晰的反映出与用户不同才做直接相关的组件(见表1:若与应用直接作用,则用“△”标记,如无直接作用,则用“○”表示)。在用户执行操作时,种箱、控制单元、动力牵引单元等多个部件会与用户发生直接交互作用;在用户执行组装搬运时液压单元、动力牵引单元多个部件会与用户产生直接交互作用;维修多部件皆可出现的问题,皆具有交互作业的可能。

表2 人机交互作用分析Table 2 Human-computer interaction analysis
4 环境系统分析
人机环境系统是高效、安全、舒适地完成人机系统目标的前提,局部环境和自然环境都会对人机系统产生影响[16]。环境是体现产品实用价值的场所,不同产品具有不同使用环境,不同使用环境赋予产品不同功能[17]。分析环境的各种制约和支撑因素,直接影响种植机的尺寸、造型、色彩、材质等方面的设计。
4.1 使用环境分析
农田地块内不同地理位置土壤具有不同的特性,农作物生长和农田环境也有一定的差异[18]。我国杂豆种植面积相较于较小,种植机的使用环境主要为连续性小地块,基于这一种植环境特征,分析杂豆种植机的尺寸及体量结构,种植机的尺寸的界定一般包含两个部分:动力牵引单元和综合播种单元。动力牵引单元在对其进行选择时要尽量选择小型拖拉机等,而综合播种单元在有针对性的进行造型设计及结构调整时在尺度上尽量小型化。目前市场上的主粮播种机尺寸按播种行数12 行、8 行、6 行、4 行等可以分为不同的大小形态,常用尺寸播种机如:德邦大为2605 气吸式免耕精密播种机(见图4):4 400 mm×2 200 mm×2 000 mm(6 行);大华宝来2BMYFQ 系列气吸式精量播种机(A 系列):2 200 mm×2 680 mm×1 500 mm(4 行)(见图5)。经分析中小型设备更易于在连续型小地块开展作业任务,因此,杂豆种植机械的研发及改良设计应主要以最小尺寸为主。但需要强调的是,在这一部分的设计中要尽量保持种箱的尺寸,使其能够实现体积变小而排种量依然能够逼近大体积排种机的排量。

图4 德邦大为2605 气吸式免耕精密播种机Fig.4 Debont 2605 air suction no-tillage precision seeder

图5 大华宝来2BMYFQ 系列气吸式精量播种机(A 系列)Fig.5 Dahua bora 2BMYFQ series air-suction precision seeder(series A)
4.2 节律性环境分析
杂豆种植机的使用季节主要是集中在春季,种植机的局部环境特征可以与季节性自然环境特征相匹配,如春季地貌环境的土质松软度与种植机动力机械间形成一定的摩擦阻力,对于不同地域使用季节的土质分析能够直接影响种植机的外观造型设计。另外,将其设计成流线有机形态,能够在一定程度上减少种植机阻力,降低牵引动力机械的能耗,并起到缓解用户操作疲劳以及提高用户作业效率的作用。除此之外,种植机的局部形态和色彩对其使用环境也起到强化识别性的作用,合理的形态和色彩能够使种植机的操作方式、操作流程具有明确的导向性,美好的形态和色彩所形成的视觉冲击力会使人获得明晰的视觉反馈,从而帮助使用者对产品做出判断。因此,在功能细节的处理上,尽可能的将形态、色彩等因素与功能相匹配并考虑其对人的心理带来的影响,从而提升种植机的功能性和品质感。
5 杂豆种植机外观改良设计案例分析
“人—机—环境”系统是以人为核心,在产品的开发中更多的考虑人的因素、环境的因素,围绕更好地发挥人的能力、提高人的效能的原则进行的[19]。基于上述杂豆种植机的人—机—环境系统分析,明确杂豆种植机外观改良设计的方向,如种植机尺寸、材质、功能定位、形态、色彩等,并开展设计。案例以杂豆种植机的主体单元—排种器和播种单元为主,与大多数主粮种植机的尺寸相同,延续农户对于认知和使用种植机的基本习惯,案例整体造型与人体尺寸的比例如图6 所示。通过外观造型设计、色彩识别设计、功能趋向设计等,提升种植机的使用体验,增加使用的安全性和快捷性,并通过整体流线型造型设计的改进和提升,增加整体美感的同时,提升动力学表现,实现速度的提升。

图6 杂豆种植机改良设计图Fig.6 Modified design drawing of a soybean planter
首先,案例依据人机分析,设计45 °缓倾式种箱设计,如图7 所示,投种时,将其倾斜至45 °,如图7所示,种箱口下降,并随种子的填充逐渐向上旋转恢复原有高度,这一过程中种袋重量也随着填充量的增加而减轻,有效控制杂豆种子填充的流量与流速,缓解种植户填充杂豆种子的难度。在这一过程中,还能够调整种植户的操作姿势,减少人员配合,提升人机交互体验。
其次,改良案例中将杂豆种植机的播种单元进行了模块化的蒙皮设计,在视觉形象上使其更具整体化特征。模块化可拆卸的蒙皮设计可以实现节律性环境的保障,并使其易于维修,增加其安全性。另外,流线性的外观造型能够在一定程度上减少种植阻力,降低牵引动力机械的能耗,缓解用户操作疲劳,并实现用户作业效率的提高。
第三,案例外观简洁,形如豆荚,有较强的寓意和识别性,且操作指示清晰,易于种植户理解维修和操作的方法,符合种植户的使用心理特点,直观易辨识的造型语言和明快的色彩能够增加种植户对机械的信赖感和满意度,并形成有效心理反馈,实现并体现用户的价值心理。
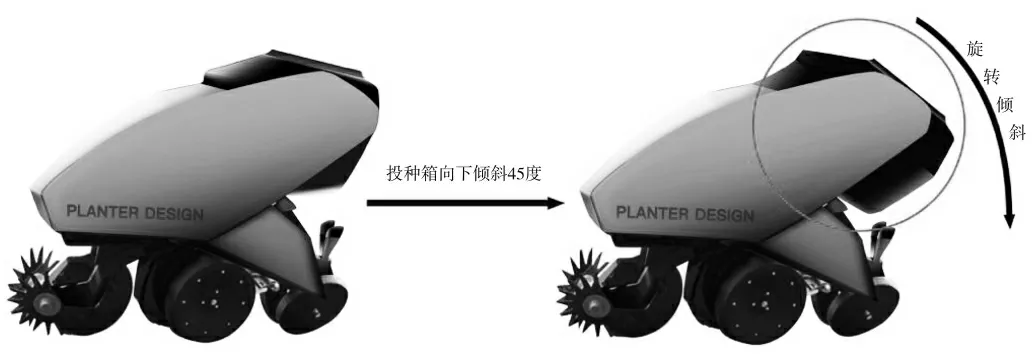
图7 自动缓倾式种箱设计Fig.7 Design of automatic slow dip seed box
6 结论
由马斯洛层次需求理论可知,安全、高效、舒适是人类的必然需求[20]。杂豆种植机的人机环境系统分析建构其相互作用模型,为创新设计提供了精准化的人机依据,构建“人本中心”的设计。研究明确人因特征与种植机之间的的影响关系,并分析了杂豆种植机的不同作业单元与人、环境之间的交互作用,以及环境系统下的节律性和约束性。基于人机环境分析数据结果,对杂豆种植机进行了改良设计,案例结果能够满足用户对于杂豆种植机的功用与审美需求,通过造型、色彩、功能的设计创新为提高产品的生产、安全、维护,并为后续研究提供借鉴。
