面向ADHD的利用HTC Vive采集手部运动数据的可行性研究
2021-05-07邓婉婷战荫伟
邓婉婷,战荫伟,罗 洁
(1.广东工业大学 计算机学院,广州 510006; 2.中山大学 生物医学工程学院,广州 510080)
0 引言
注意力缺陷伴多动障碍(ADHD, attention deficit hyperactivity disorder)是一种常见的儿童神经发育障碍,患病率在5%~7%之间[1],表现为注意力不集中、过度活跃和冲动[2]。由于ADHD缺乏具有鉴别意义的病因学或病理学改变,目前医生主要依靠临床观察和评分量表来进行诊断[3]。然而有研究者指出,量表本质上是主观的,准确性不可靠。无法客观诊断是导致ADHD患病率长期上升的原因之一[4-6]。因此,如何克服现有诊断方法的不足,为医生提供客观、有效的工具来辅助诊断ADHD就成为研究热点。脑电图(EEG, electroencephalogram)[7]和连续行为任务测试(CPT, continuous performance task)[8]是目前最流行的客观工具,但管理成本高、设备昂贵、专业性强。有研究者甚至质疑CPT测试的诊断效用,指出CPT评判指标与家长和教师对注意力不集中和多动冲动行为评分呈弱相关[9]。
近年来,虚拟现实(VR, virtual reality)技术快速发展,性价比不断提升,因而在儿童精神疾病的诊断中的应用逐渐广泛,表现出生态效度高、实验条件可控等优势[10-11]。使用VR技术可以构建一个视觉、听觉、触觉等高度真实的场景,给用户带来多种感觉通道的融合体验。在VR场景中,用户通过头戴式显示器(HMD, head-mounted display)和传感设备(数据手套、手柄等),就可以身临其境地与VR系统进行交互,使用户从一个被动想象者转变为一个主动、积极学习者,从而有助于研究者观察个体的行为和发现他们的认知缺陷。近年来,VR技术在ADHD儿童的治疗领域的应用也开展起来。由Rizzo等人[12]开发的虚拟教室,提供多感官参与的注意力测试功能,已经成为诊断和表征ADHD患者注意力不集中症状的一种有效工具。Adams等人[13]和Bioulac等人[14]通过比较ADHD儿童和正常儿童在虚拟教室环境测试中的注意力表现,发现ADHD儿童持续注意力显著低于正常儿童。Rodríguez等人[15]与Pollak等人[16]的工作均表明,与传统的CPT测试相比,基于VR的CPT测试更能有效区分ADHD患者与对照组,而且更受参与者的欢迎。此外,由VR所带来的沉浸感可以使被试忘记正在接受测试任务而产生更多的自发行为。
上述研究表明,将虚拟现实技术用于辅助评估ADHD是一种可行且有效的方法。然而,它们只通过测试过程中被试的注意力表象,来衡量其在各种注意力挑战任务中的反应时间、表现和错误情况,而未对他们与VR系统交互过程中的活动水平进行客观测量。
人体运动能力的客观测量在辅助医学诊断中起着重要作用[17-18]。在ADHD的诊断中,临床指导也鼓励专业人员收集儿童的行为信息[19]。文献[20]表明,与对照组相比,多动为ADHD患者的核心特征。早期的研究[21]采用活动记录仪对被试的活动水平进行监测,发现ADHD患者大多比正常儿童活跃。近期Lin等人[22]通过佩戴在被试手上的智能手表(内含陀螺仪和加速度计)来测量他们在课堂上的手部运动,发现ADHD患者比对照组手部动作变化速度更快、频率更高。手作为人体主要的运动器官,在与VR系统的交互过程中扮演着重要角色,被试可通过系统提供的实时视觉反馈来引导手部运动。因此,我们有必要深入探讨ADHD患者与对照组在视觉反馈引导下的手部交互过程中的运动差异,充分利用VR系统中的运动捕捉功能,实时采集被试在VR环境中的手部交互运动数据,即手部的空间位置坐标,用于量化被试的手部运动,辅助医生进行ADHD的客观诊断。
HTC Vive是一款集头戴式显示设备和运动捕捉为一体的虚拟现实系统[23],与市面上主流的运动捕捉系统如VICON、OptiTrack相比,具有体积小、便于携带、价格低廉等优点,因而受到众多研究人员的青睐[24]。HTC Vive系统由三大类部件组成:一个头戴式显示器、一对手持控制器、两个激光发射器。
HTC Vive系统可以实时追踪定位手持控制器的位置和方向,手持控制器在虚拟空间中的真实运动同时又可以反馈给系统,当用户使用手持控制器与VR系统进行交互时,系统通过追踪手持控制器的运动便可追踪到用户的手部运动。
HTC Vive系统使用激光发射器交替发射水平和垂直的同步激光束进行扫描,手持控制器表面分布的多个光敏传感器测量激光到达的时间,解算出它们与激光发射器所形成的水平夹角和垂直夹角[25]。手持控制器融合多个光敏传感器的角度数据和内置惯性测量单元的运动数据(包含位置和旋转角度),解算出其在虚拟空间中的位置和旋转角度。但惯性测量单元中随机误差较大,通常会干扰和覆盖传感器中有用的信号,当惯性测量单元用作运动控制系统中的反馈传感器时,这些误差会随时间累积,导致运动数据显著漂移。因此我们将从静态和动态两方面来评估手持控制器用于追踪被试手部运动的可行性,衡量手持控制器长时间处于静止状态时的方位数据(位置和旋转角度)随时间的漂移程度,分析由惯性测量单元本身特性所带来的随机误差及其对系统定位精度的影响,测量手持控制器平移、旋转后所报告的方位与实际所处方位之间的偏差,以评估手持控制器是否能够稳定移动到正确位置。
本文中,我们以HTC Vive系统测试ADHD为目标,探讨HTC Vive系统采集手部运动数据的可行性。为此,我们设计了两组实验,以评估HTC Vive系统在虚拟空间中追踪定位手持控制器位置和旋转的准确性和稳定性。实验一测量手持控制器静置追踪区域中心,以及在X、Y、Z轴方向上产生的位置和旋转角度抖动误差;采用艾伦方差方法对手持控制器的长时间静态输出数据进行分析,得到HTC Vive系统的定位随机误差。实验二将手持控制器分别绕着X、Y、Z轴进行旋转,沿着X、Y、Z轴进行平移,测量系统在各轴方向上的旋转和平移误差。
1 材料与方法
1.1 系统架构
实验场地的地板铺上反射率低的地毯,排除实验环境中反光物体对HTC Vive系统的干扰,以保证系统对手持控制器能够正确跟踪。将HTC Vive系统按照用户手册进行设置,两个激光发射器分别固定在高2 m的三角支架上,并向下倾斜40°,发射器的LED镜头朝向实验区域中心,两个三角支架水平相距3米。将电源线连接到每个发射器后开始设置频道,一个发射器设为频道b,一个发射器设为频道c。上位机启动Steam VR应用程序,设定系统的追踪区域。
两个实验分别从静态和动态两个方面来测量系统追踪定位手持控制器的位置和旋转精度。在实验一中,采集手持控制器长时间静置时的位置和旋转角度数据,用于计算抖动误差和进行艾伦方差分析;在实验二中,采用高精度千分尺旋转平台实现手持控制器绕X、Y、Z轴旋转,采用移动滑轨实现手持控制器沿X、Y、Z轴平移,采集多组手持控制器的旋转角度和位置,用于计算系统的平移误差和旋转误差。
1.2 抖动误差计算方法

(1)
(2)
(3)


1.3 艾伦方差
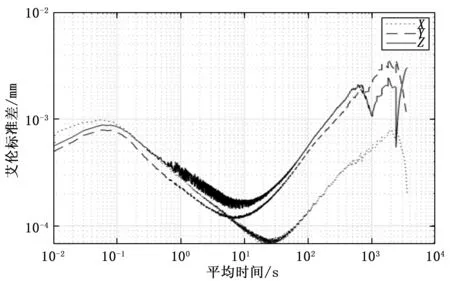
艾伦方差最初是一种用于研究高精度振荡器稳定性的方法[26],后来广泛用于辨识惯性测量单元的随机误差[27]。艾伦方差方法从时域上对信号频域稳定性进行分析,将随机误差作为时间序列来处理,不仅有助于识别观测数据中存在的已知误差项的来源,还有助于确定仪器自身固有的或其内部不明的误差来源[28]。它能对误差源以及对整个噪声特性的影响程度进行细致的表征和识别。本文分别对手持控制器所反馈的位置和旋转角度实测数据进行艾伦方差方法分析,得到艾伦标准差-平均时间双对数曲线图。
艾伦方差方法对手持控制器位置数据集S的具体处理过程如下:
1)划分位置数据集S:
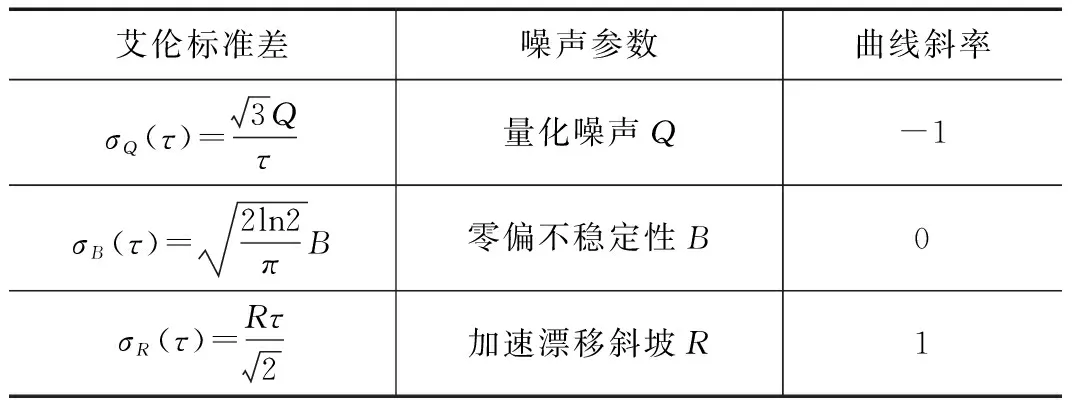
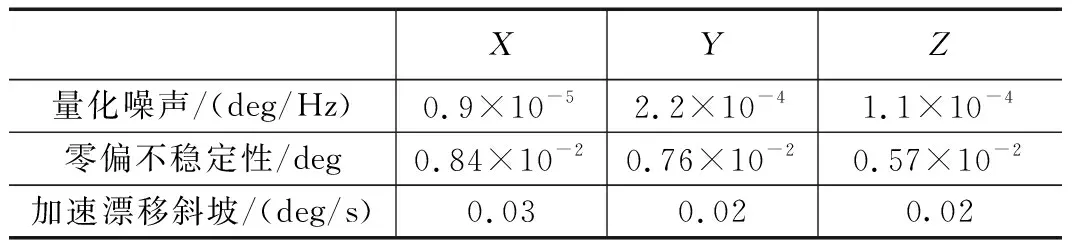
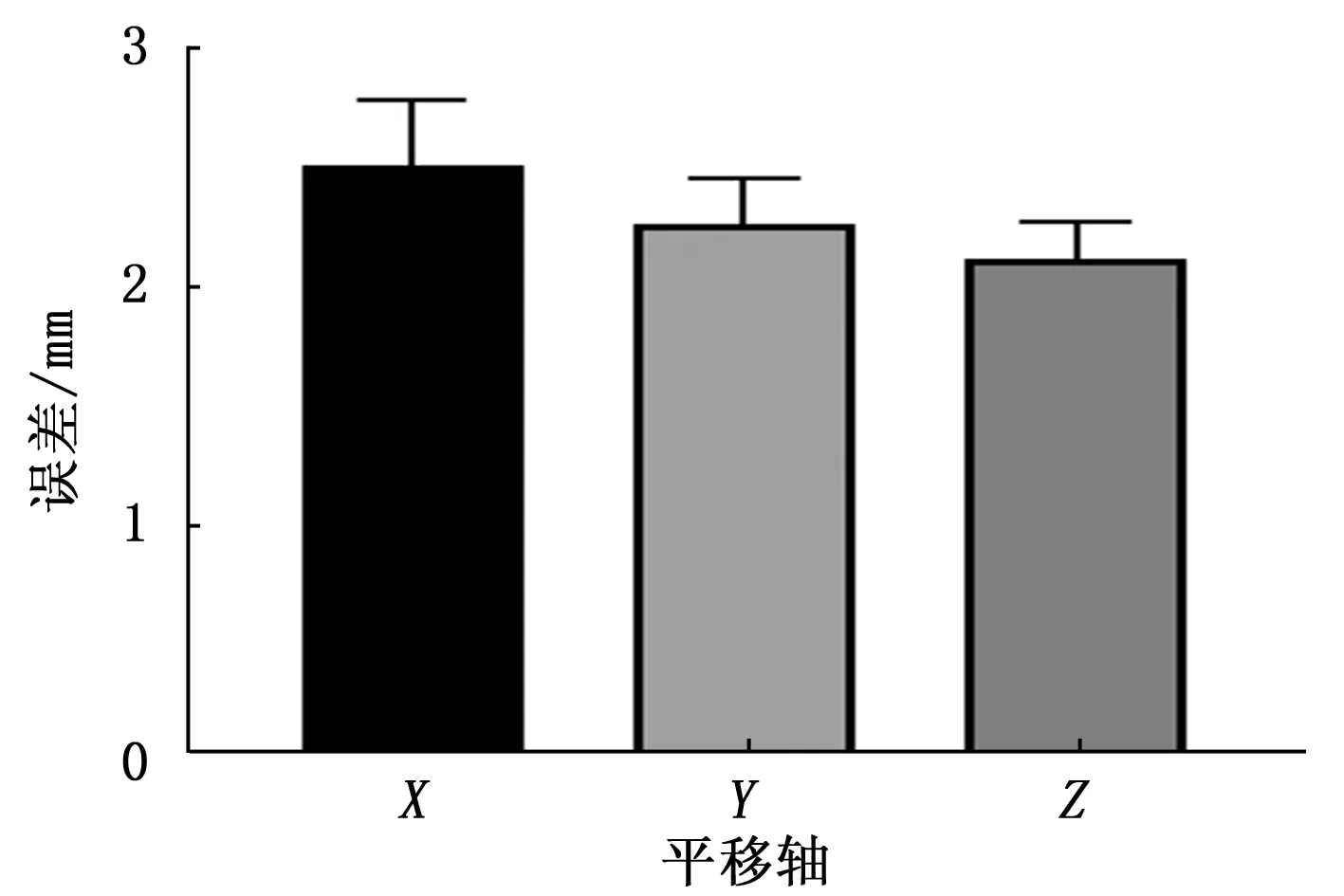
每连续n 2)计算子集Sk的平均值: (4) 3)定义艾伦方差: (5) 艾伦方差的平方根σ(n)通常称为艾伦标准差。 4)绘制艾伦标准差随平均时间变化的曲线: (6) 这里,τ=nt0。上式只有变量τ或n,可简写为: (7) 将艾伦标准差-平均时间双对数曲线看作是由多段不同的斜率线段首尾连接而成[32],采用最小二乘法对每一段数据进行拟合,可求得每一段拟合函数的系数,再根据对应系数求解出各项误差项系数为: (8) 表1 艾伦方差与常见噪声系数对应关系 (9) (10) 将手持控制器静止平放在HTC Vive系统的追踪区域中心,见图1,以100 Hz的速率持续采集手持控制器在虚拟空间中的位置和旋转角度,持续2小时,数据采集程序在Unity虚拟引擎中运行。对所采集的数据进行分析,得到手持控制器在X、Y、Z轴方向上的位置抖动误差分别为0.241 9 mm、0.238 8 mm、0.193 5 mm;旋转角度抖动误差为0.020 7°、0.042 2°、0.018 2°。 数学思想方法都是以一定的数学知识为基础,反过来又促进数学知识的深化以及向能力的转化.《普通高中数学课程标准》明确提出数学教学必须鼓励学生积极参与数学活动,不仅是行为上的参与,更要有思维上的参与.笔者认为,在高中数学的核心概念教学中,要引导学生体会和领悟数学思想方法中蕴含的数学的本质内涵和的重要规律.要通过各种方式激活思维,深化思维,不断地提高数学思维能力.这样才能逐步提高学生发现问题、分析问题和解决问题的能力,不断提高学生的思维品质和数学素养. 图1 手持控制器静置图 分别对手持控制器的位置数据集S和旋转角度数据集W采用艾伦方差方法分析,结果见图2和图3。 图2 位置艾伦方差分析结果图 图3 旋转角度艾伦方差分析结果图 根据图2和图3中曲线的斜率可知HTC Vive系统的随机误差项主要包含了量化噪声、零偏不稳定性、加速漂移斜坡。在平均时间较小的部分,艾伦标准差双对数曲线斜率均接近,对应的误差项主要为量化噪声;在平均时间稍大的区域,曲线斜率均接近0,零偏不稳定性是主要的误差项;在几十到几百秒的时间范围内,曲线斜率均接近1,加速漂移斜坡为主要的误差项。采用最小二乘法分别对位置和旋转角度艾伦方差分析结果图进行拟合,得到各项误差系数见表2和表3。 表3 旋转角度随机噪声系数分析结果 测量HTC Vive系统追踪定位手持控制器旋转的精度,利用夹具将手持控制器固定在高精度千分尺手动可调架滑台旋转平台上,放置于追踪区域的中心,见图4。实验员转动旋转平台分别让手持控制器绕X、Y、Z轴旋转,每个轴顺、逆时针方向各进行25次相同度数的旋转,每进行一次旋转后,停留10 s,采集旋转角度数据,共采集150组样本,每组样本的采集时长为10 s。每次旋转的角度范围为5~50°。 图4 手持控制器旋转示意图 测量HTC Vive系统追踪定位手持控制器平移的精度,将手持控制器固定在移动滑轨上,置于追踪区域中心,如图5所示,实验员移动滑轨使得手持控制器分别沿着X、Y、Z轴方向各进行50次平移,每次平移后停留10 s,采集手持控制器的位置数据,共采集150组样本。每次平移的范围为5~50 cm。 图5 手持控制器平移示意图 最终计算得到手持控制器绕X、Y、Z轴旋转的旋转误差为0.317°、 0.285°、0.305°,如图6所示,手持控制器沿着X、Y、Z轴平移的平移误差为2.509 mm、 2.247 mm、2.096 mm,见图7。 图6 旋转误差 图7 平移误差 实验一的结果表明手持控制器静置时的位置抖动误差小于0.25 mm,旋转抖动误差小于0.05°,可见手持控制器长时间静置时的位置和旋转角度漂移量均比较小,HTC Vive系统的追踪精度较稳定。采用艾伦方差方法分析手持控制器静置时的位置和旋转角度实测数据,发现其主要包含了量化噪声、零偏不稳定性、加速漂移斜坡这三种误差项,误差项系数分别对应于艾伦标准差-平均时间双对数曲线图中的各平均时间段。 本文分别从静态和动态两个方面来评估HTC Vive系统追踪定位手持控制器位置和旋转角度的准确性和稳定性,量化系统定位的随机误差。最终得出系统在X、Y、Z轴的位置抖动误差小于0.25 mm,旋转抖动误差小于0.05°;平移误差小于3 mm,旋转误差小于0.35°。实验结果表明误差都在允许范围之内,系统可用于采集人体的手部运动数据,为进一步量化被试的手部运动,研究ADHD患者与正常儿童在虚拟现实环境中手部交互的运动差异奠定基础,从而辅助医生有效地区分ADHD患者与正常儿童。
1.4 旋转和平移误差计算方法

2 实验
2.1 实验一


2.2 实验二



2.3 实验结果分析
3 结束语