转向路感控制系统在汽车上的应用
2021-05-07李晓莲高李明孙文政吴旭静
李晓莲,高李明,孙文政,吴旭静
(南京依维柯汽车有限公司产品工程部,江苏 南京 211806)
1 前言
路感是指车辆在转向过程中,转向系统把车辆运动状态和路面状态信息反馈给驾驶员的一种现象。汽车转向时,轮胎产生的回正力矩通过转向系统传递给驾驶员,同时传递给驾驶员的还包括路面不平度、路面附着状况、转向程度和轮胎载荷及气压等信息。驾驶员通过获得的信息,进而对驾驶操作进行修正,保证汽车安全高效运行。现有汽车转向系统为了减轻驾驶员负担,采用了动力转向,即通过附加动力源进行转向助力。但是,助力力矩与转向路感相互矛盾,在路面回正力矩保持一定时,助力力矩越大则驾驶员得到的转向路感越差。
新兴的电液主动转向系统可以对力与转角进行分别控制,实时调整转向传动比大小,获得良好的转向性能。电液主动转向系统采用液压模块调整附加前轮转角时,不可避免对系统力传递特性产生影响,使驾驶员得到的路感偏离实际道路状况,不利于驾驶员对车况与路况的掌握,影响行车安全。
合理的转向系统设计以及路感控制策略,对驾驶安全性显得尤为重要。本文针对电液主动转向系统,提出一种路感控制策略,充分发挥其变传动比的优势,使驾驶员得到更好的路感,对于实际产品开发具有很大的意义。
2 电液主动转向路感系统简介
电液主动转向路感控制系统,可以在执行主动转向时,根据路面实际情况施加合适的助力力矩,给驾驶员反馈真实准确的路面信息;并通过提供一种路感控制方法,增强系统抗干扰能力,提高系统鲁棒性。系统由机械传动模块、电动助力模块、液压模块、传感器模块及控制模块5大模块组成,详见图1。
1)机械传动模块包括依次连接的方向盘、转向管柱、循环球转向器、转向摇臂、转向直拉杆、转向梯形及车轮。转向直拉杆包括液压缸、活塞、直拉杆;液压缸的外壳通过转向摇臂与循环球转向器输出端固定连接,外壳上开设有进油口和出油口;活塞装配在上述液压缸内,活塞两端固定安装直拉杆,直拉杆后端连接转向梯形及车轮。
2)电动助力模块包括助力电机、联结套机构。助力电机采用弧形直线电机,弧形直线电机初级与控制模块电气连接,次级并列设置在所述机械传动模块的转向管柱上,转向管柱分为上下两段,分别通过联结套机构与弧形直线电机次级的上下两端连接。
3)液压模块包括储油罐、驱动电机、液压泵、比例换向阀。液压泵驱动电机连接液压泵,储油罐中的低压油经液压泵作用后转换为高压油并流向比例换向阀;比例换向阀分配高压油方向和流量大小,通过油管和上述液压缸相通,改变活塞两侧的压力大小,驱动活塞相对液压缸运动。
4)传感器模块包括转角传感器、转矩传感器、车速传感器、轮速传感器、横摆角速度传感器、侧向加速度传感器。转角传感器安装在转向盘上并与所述控制模块电气连接,提供驾驶员输入的转角信号;转矩传感器安装在转向管柱上并与所述控制模块电气连接,提供转向管柱实际转矩信号;车速传感器、轮速传感器、横摆角速度传感器、侧向加速度传感器安装在整车上,分别与控制模块电气连接并提供车速、轮速、横摆角速度、侧向加速度信号。
5)控制模块包括变传动模块、整车状态估计模块、回正力矩估计模块、变传动模块、附加位移控制模块、转矩-位移修正模块、助力增益模块、助力增益修正模块。

图1 系统结构框图
3 电液主动转向路感系统控制原理
电液主动转向路感系统的控制原理框图见图2。
系统通过各控制模块获取车辆状态信息,并根据获取的相关信息计算回正力矩、理想助力增益值及理想传动比,判断是否执行主动转向干预操作:①状态估计模块31接收侧向加速度信号25和轮速信号35,根据车辆载荷和轮胎参数,采用卡尔曼滤波方法估计出车轮所受的纵向力和侧向力,并计算出侧向力影响系数36,回正力矩估计模块33根据侧向力影响系数计算回正力矩37;②助力增益模块29接收车速信号23和转矩信号22,结合回正力矩37,计算出理想助力增益38。计算理想助力增益的方法为:

式中:Ta——理想转矩;Td——驾驶员输入转矩;T0——开始提供助力时转矩;ka——理想助力增益;Tmax——最大助力输入转矩;Tf——最大转矩;kb——助力特性曲线斜率。
变传动模块34接收车速信号23、横摆角速度24和转角信号21,计算理想传动比39,并根据主动转向控制策略,判断是否执行主动转向干预操作。
3.1 不执行主动转向干预操作时的路感控制
设Tr为回正力矩,Tf为摩擦力矩,Ta为助力力矩,Tp为驾驶员感受到的力矩,则Tr=Tf+Ta+Tp,由于摩擦力矩难以控制,以固定值处理,助力增益计算模块根据输入的车速和转矩信号,计算出驾驶员感受到的理想力矩。
助力增益计算模块结合回正力矩估计模块输入的回正力矩,计算出所需要的助力力矩大小,根据反馈的弧形直线电机实际电流信号,采用基于BP神经网络整定的PID控制算法,动态调整理想助力增益;电流增大时,弧形直线电机输出的转矩增大,经过转向管柱作用,驾驶员感受到的力矩减小,电流减小时则相反。
基于BP神经网络整定的PID控制算法,具体步骤如下。
1)确定BP神经网络初始结构参数,包括:隐藏层数目m,隐藏节点数,惯性系数λ,学习率α,输入节点数目n,输出节点数目q,初始化各层加权系数wii=1,2,3,设定采样序数k=1。
2)进行采样分别得到给定助力增益R(t)和实际助力增益Q(t),计算当前时刻偏差为E(t)=R(t)-Q(t)和BP神经网络各层神经元的输入输出,输出的参数即为PID控制的比例、积分和微分参数。
3)BP神经网络进行在线学习整定,对各层加权系数wii=1,2,3进行自适应调节;令k=k+1,重复上述步骤。
3.2 执行主动转向干预操作时的路感控制
1)附加位移控制模块32发出驱动电机控制信号和比例换向阀控制信号,控制驱动电机驱动液压泵产生高压油,经过比例换向阀流量分配进入液压缸,改变活塞两侧压差大小,使与活塞连接的直拉杆相对液压缸输出附加位移40,并通过转向梯形机构将附加位移转化为附加前轮转角,完成主动转向干预。
2)转矩-位移修正模块30接收经过附加位移控制模块作用后输出的附加位移40,采用Hinf鲁棒控制方法对助力增益进行修正,输出电流修正信号41。
3)助力增益修正模块44分别接收电流修正信号41和理想助力增益38,并对两者进行线性叠加,输出弧形直线电机控制信号26。弧形直线电机初级在修正后的控制信号26的作用下,输出转向助力转矩42,经弧形直线电机次级和转向管柱,作用于循环球转向器并向车轮传递。
本文提出的路感控制方法,增强系统抗干扰能力,保证行驶稳定性,同时获得较好的转向路感,且系统鲁棒性较好。
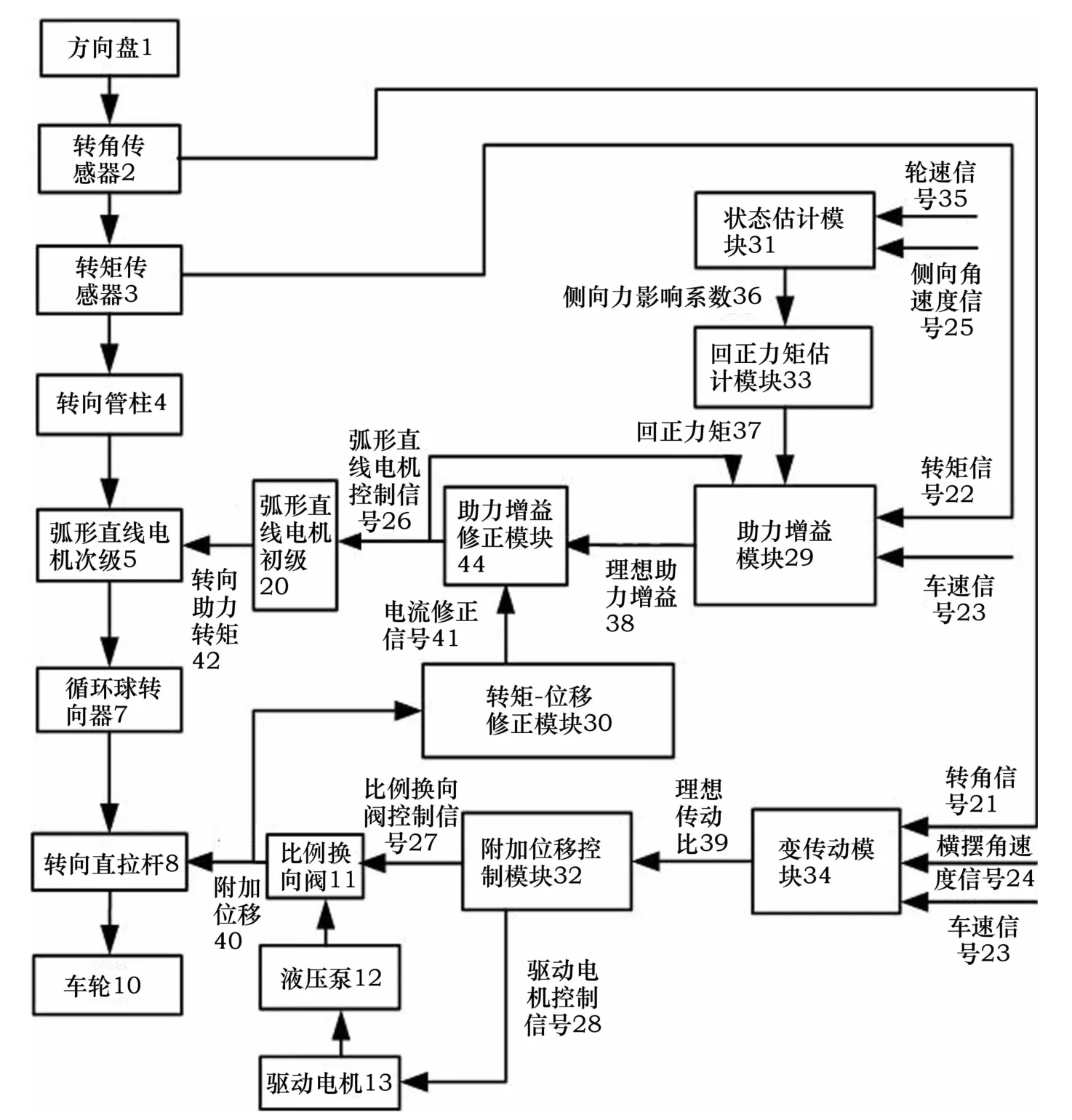
图2 电液主动转向路感系统的控制原理框图
4 结束语
本文介绍的电液主动转向路感控制系统,可根据汽车不同行驶工况,改变转向系统传动比大小,在执行主动转向的同时,克服变传动比模块造成的力矩传递特性变化对转向路感的影响,根据路面实际情况施加合适的助力力矩,给驾驶员反馈真实准确的路面信息。
系统采用弧形直线电机助力,直接驱动转向管柱提供转向助力,减少了采用普通电机需要搭配减速机构产生的摩擦损耗,结构简单,易于控制且启动稳定性较好。
系统采用在循环球转向器前的转向管柱进行助力的方式,弧形直线电机输出的助力转矩经过循环球转向器向车轮传递,传动比较大,所需提供的助力转矩较小,电机体积和质量可以减小,方便在驾驶室布置。
