前向毫米波雷达系统自动校准功能
2021-05-07朱龙
朱 龙
(徐州徐工汽车制造有限公司,江苏 徐州 221100)
随着经济的快速发展和道路状况的改善,中国汽车保有量持续攀升,交通事故总量呈上升趋势,据统计,中国万车死亡率已居世界首位。面对交通安全问题的严峻形势,汽车主动安全越来越受到国家和众多主机厂的广泛关注。前向毫米波雷达传感器作为主动安全技术(ACC、FCW、AEB)的核心组成部分,在越来越多的各类车型上得到应用。
依靠发射特定频率 (76~77GHz)的电磁波,接收和处理回波信号来侦测前方目标的特性参数,如距离、相对速度、角度和反射功率等。由于天线对发射的电磁波做了聚波处理,因此雷达的探测有一定的方向性,探测范围在垂直于天线面的一定开角内 (Field of View Fov)。因此雷达的安装有一定的误差要求,当安装偏角度过大,致使天线波束无法照射到上层功能重点关注区域,重要目标检测性能受损。
行业内针对雷达安装偏差的校准方式大致分为两类:第一,整车产线下线校准,该方法借助整车生产线上的工装设备及定位系统,确认雷达初始安装误差量并做机械校准或软件补偿;第二,自动校准方案,该方法在整车离开生产线后进行,不依赖于特定的装置或设备,只需在正常道路环境中运行一定时间,雷达自动校准算法以环境中特定目标作为参考,以自学习的方式,便可完成雷达安装初始误差的校准补偿。
本文聚焦于雷达横摆向自动校准功能,从功能模块设计、校准流程、校准原理、功能测试4个方面进行解析,为后续类似系统开发和应用提供参考。
1 自动校准模块
车辆在安装预警系统下线后,通常会做一次下线校准。检测此时雷达横摆向的安装状态,如果有偏差,通过手工调节雷达法线朝向或系统自动做出补偿。在日常使用过程中,雷达会在设定的时间节点上,重复检测自身状态,保证雷达在全生命周期中的探测姿态误差始终在要求的范围之内。
雷达中自动校准功能模块与ADAS系统、整车系统数据流和接口如图1所示。数据流主要描述:用户特定情况下给出输入、给出什么输出、可以实现的精度。自动校准模块需要通过ADAS系统接收开始校准指令、车辆信息,同时输出校准结果。
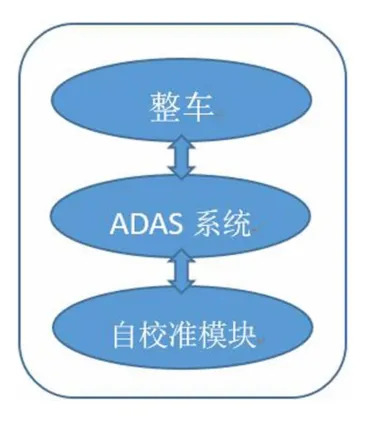
图1 数据流框图
2 自动校准流程
整体流程如图2所示。
步骤1,触发自校准。雷达安装完成后,车辆驶离工厂线。驾驶员向雷达发出第一个自动校准命令,当车辆达到规定速度,目标量满足校准要求后,校准模块开始工作。
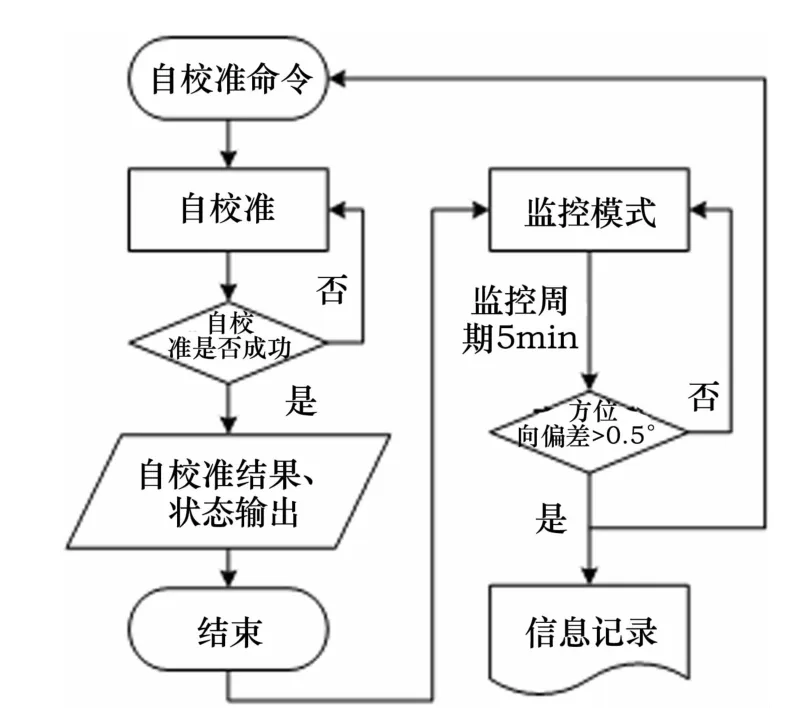
图2 自动校准系统状态转换流程
步骤2,自校准完成。自动校准算法检测到偏差后,进行补偿。
步骤3,触发监控模式。补偿成功后,将功能转换为监视模式,在不干扰雷达正常功能的情况下检测到角度偏差。当偏差超过定义的阈值时,将提示警告。
3 自动校准算法原理
根据静止目标的绝对速度应等于零的事实建立方程,优化求解雷达横向偏角(图3)。
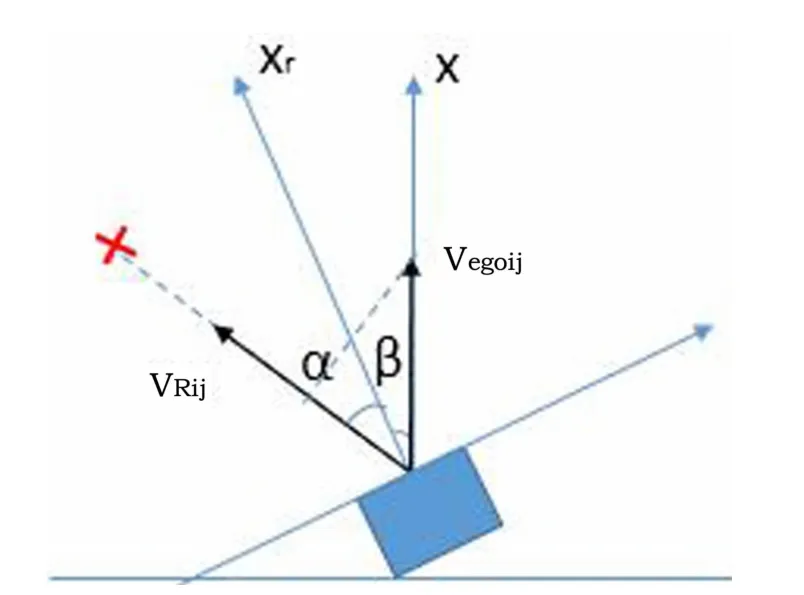
图3 雷达横向偏角示意图
其中,vego表示本车车速,vR表示目标的径向速度,α表示目标的方位角,β表示雷达相对于车头正前方的横向偏角,将vego向径向速度方向投影,对于每帧中的每个目标,均可建立各参数间的关系方程如下:

式中:i,j——分别代表帧号和目标在当前帧的编号。
由于车速存在不可忽略的误差,将车速vego也作为一个待优化参数参与计算,给定其模型为正比例模型,式(1)变为:

公式(2)是一个关于变量para={β,α}的超静定非线性方程组,可用高斯-牛顿法进行迭代求解。
图4为自校准的工作算法流程图。

图4 自校准工作算法流程图
4 功能测试
测试原理:初装雷达安装在车辆中线上,使雷达波束法线与车辆中线存在夹角X,通过测量,保证此角度0.3°<X<3°。将车辆行驶至特定的校准环境中,自校准功能开启,接收到系统发出校准完成指令时,测量校准后雷达法线与车身中线的夹角。
在特定路段重复以上操作,求校准后夹角平均值。
4.1 自校准开启前提条件
1)车辆姿态:①车辆应该行驶在长直的道路上;②车速应该大于15km/h;③车辆可以提供车速和横摆角信息。
2)雷达姿态:①安装误差应该满足表1中的要求;②雷达可以探测到足够多的目标和足够强的目标。
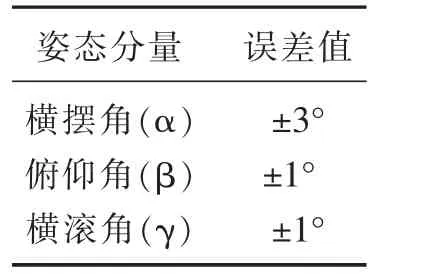
表1 雷达姿态
3)工作环境:①有护栏的直线道路,横向距离雷达2~3m;②连续护栏长度至少200m;地面平坦,无明显起伏;③自校准模式应激活传感器的特殊工作模式以实现自动对准功能。
4.2 自校准要求结果
自校准:0.3° @10min;偏差角度警告阀值>0.5°;监测周期:5min。
4.3 效果和精度验证
使用同一个雷达,在同一日期、同样的场景和车速的情况下,多次安装不同初装误差角度进行自校准测试,每次安装都反复测试得到多组数据,不同角度安装的雷达精度统计表详见表2,校准偏角值如图5所示。大角度(3°)校准补偿后护栏的变化如图6所示。
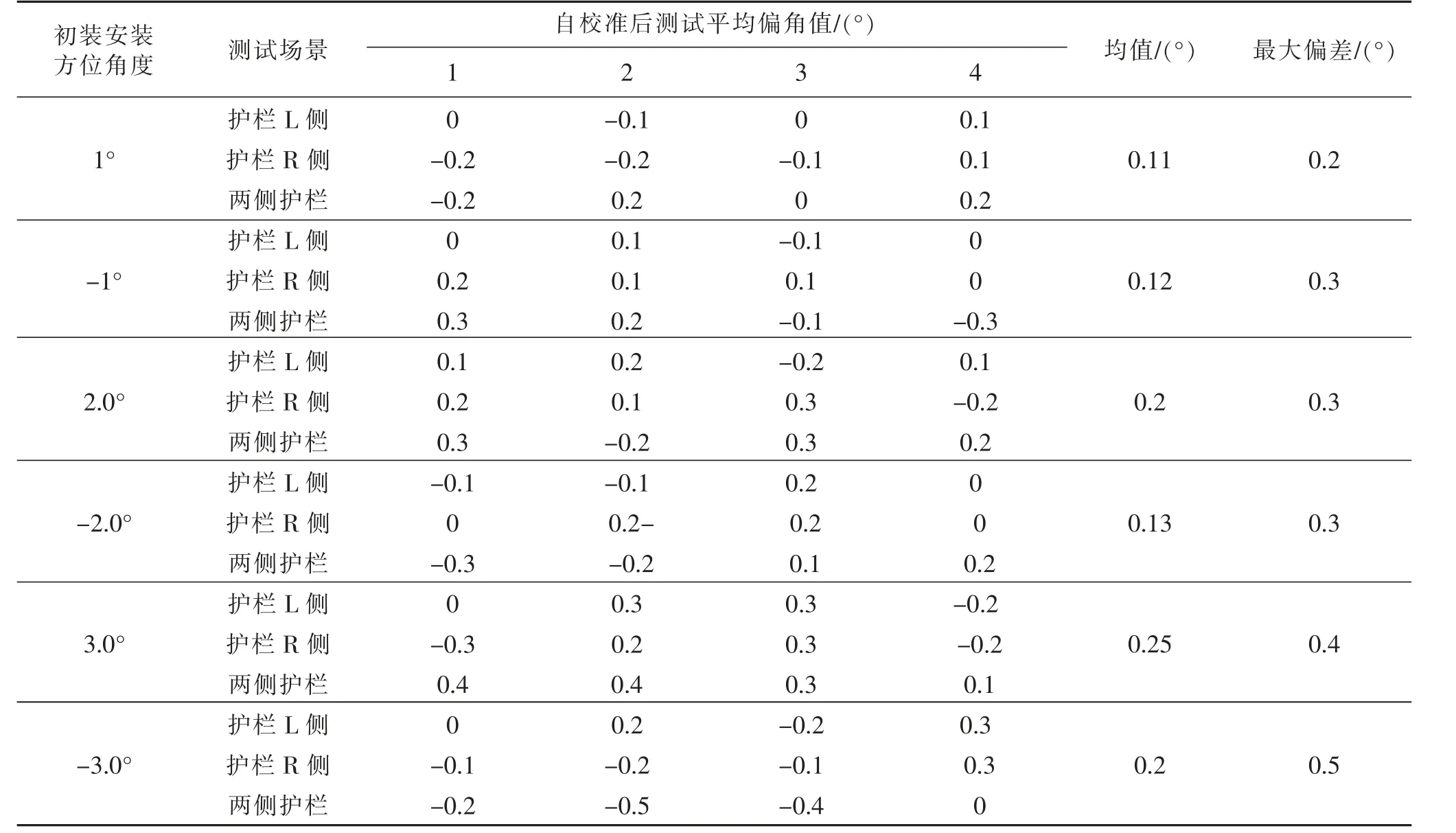
表2 不同角度安装的雷达精度统计表
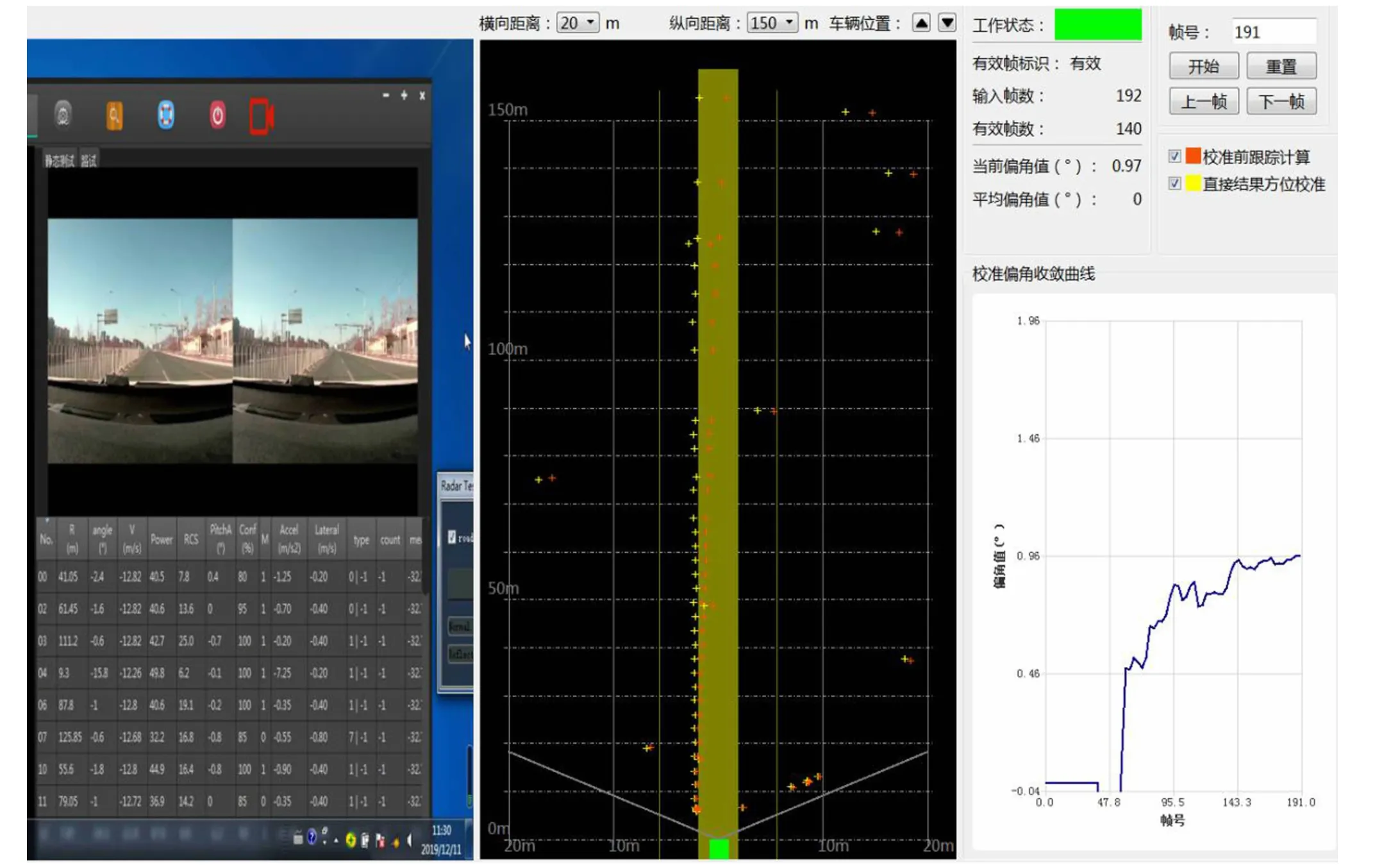
图5 校准偏角值
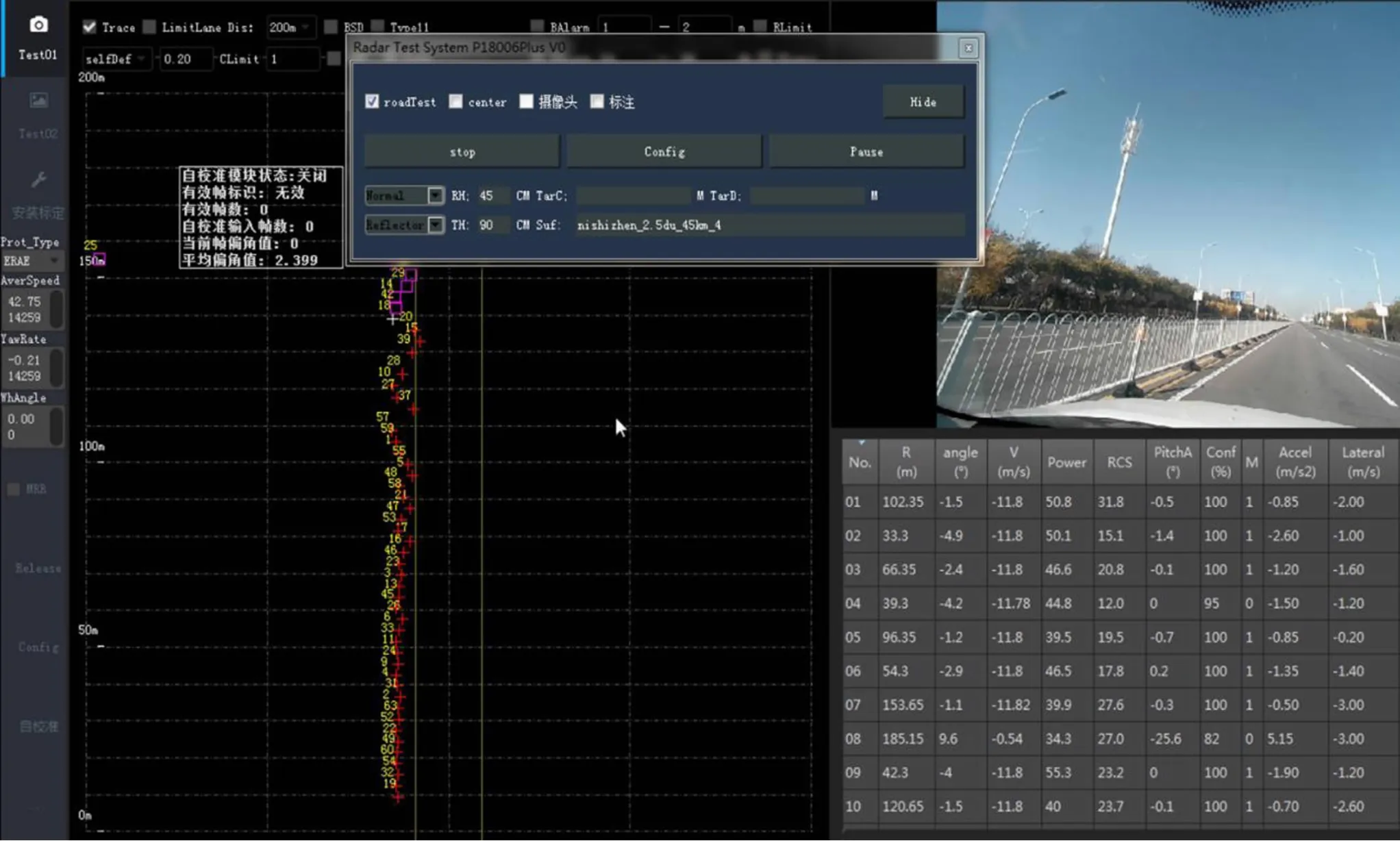
图6 大角度 (3°)校准补偿后护栏的变化
通过测试数据的统计分析,自校准模块对于小角度和大角度的校准精度基本一致,对0°~3°范围内、正负方向的雷达偏角均能有效实现校准,绝大部分场景下,校准误差在±0.3°范围内,两侧目标距离较近时存在干扰现象,效果可能较差。
4.4 测试结论
1)当前自校准算法不受本车速度的影响,可以适应多种较复杂的场景,并能兼容在干净良好场景和复杂场景下的校准精度,95%的结果精度可达到±0.3°;当前自校准模块的时间消耗不超过3min,满足嵌入式的运行要求。
2)前装毫米波雷达系统可以采用产线校准配合下线后自校准方式,减小雷达朝向角度偏差对上层预警系统性能的影响。
