全自主智能无人机在河道治理工程中的应用
2021-05-06严国辉
严国辉
(中水兴锋盈控股有限公司,福州 350821)
0 引 言
近年来,无人机技术被广泛应用于遥感测绘领域,针对很多复杂工程都能进行有效的辅助工作,如电力巡航、环境工程、地质灾害普查等。无人机技术是一种采集空间数据的关键技术,不仅可对地形广泛区域影像进行实时采集传输,而且具有采集快速高效的优点[1]。现阶段,国内外均对无人机航测技术等不同领域进行了系统性分析,同时提出增强无人机测量准确度的方法。无人机航测技术在西方发达国家应用较早,发展时间较长,总体上已经处于比较成熟的阶段。2007年森林大火肆虐时,美国学者就开始使用“伊哈纳”的无人机来评估大火的严重程度以及灾害的损失估算工作,但其航测成本以及后续数据的处理分析和应用价格都十分高昂。在国内,我国学者孙瑞提出了无人机航测在水利工程勘测中的应用探讨,创造了更加便利的勘测条件,提高勘测外业的作业效率;熊一提出了无人机航测技术在矿山测绘作业中的运用,分析和介绍了无人机在生产技术方面的必要性。
目前在河道治理工程中,存在测量区域广泛、限制因素较多、测量精度要求高、技术难以实现、涉及因素多、人为干预大等问题。在此背景下,将全自主智能无人机应用于河道治理工程中具有重要的现实意义。本文通过无人机进行航拍,能够快速采集全景图像,获取对应地形污染源数据,有助于辅助河道治理,提高河道治理工程进度。
1 基于无人机航测技术的河道数据采集与处理
1.1 推测返航位置
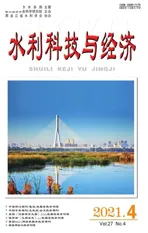
将无人机应用到河道工程治理中,首先要对无人机的返航位置进行推定,计算出应飞航向,引导飞机安全返航。无人机返航推测示意图见图1。
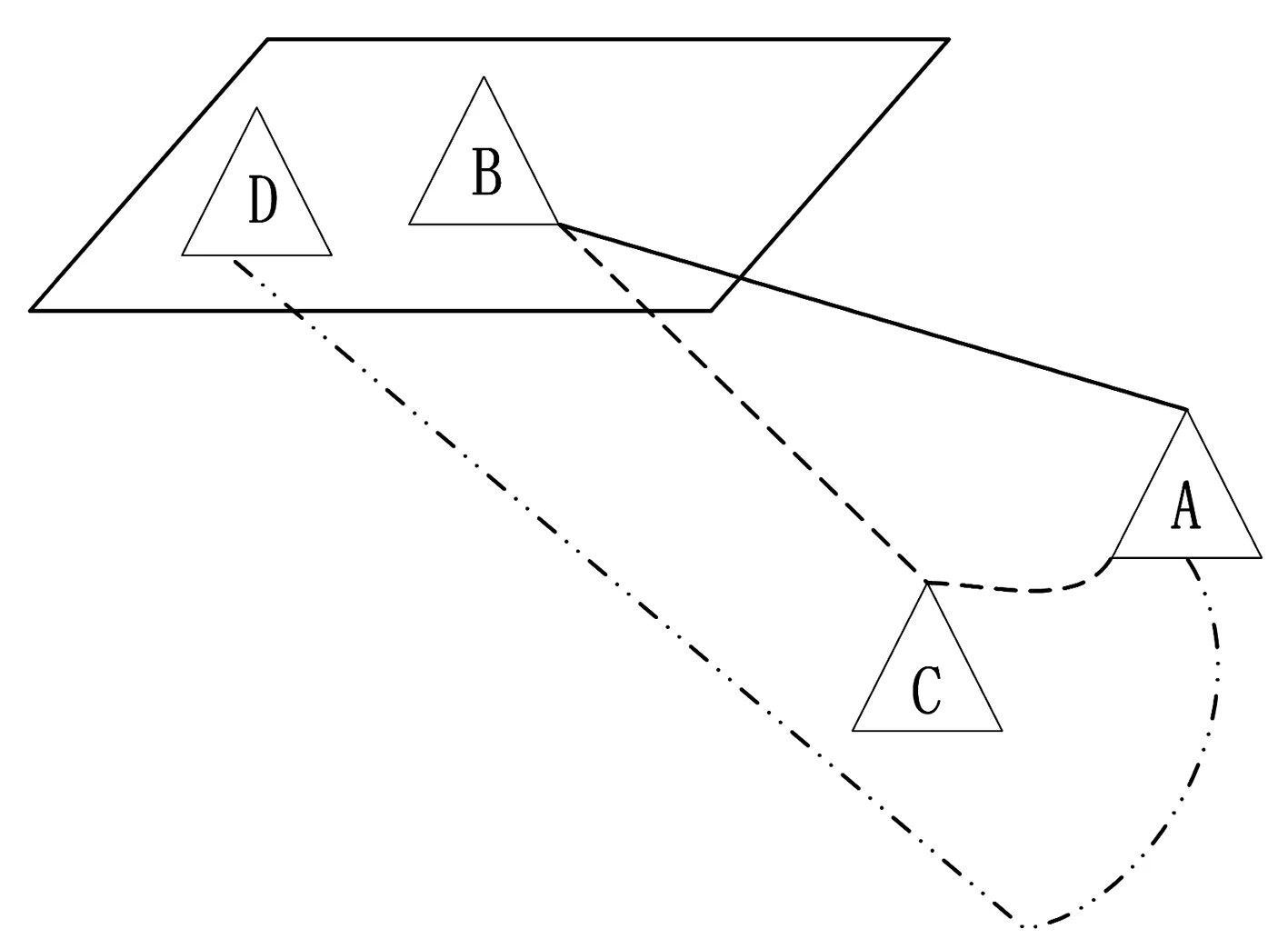
图1 返航推测示意图
图1中,A、B两点的连线为期望航向指引无人机飞向定点C,当无人机到达C后、将C和B的连线作为期望航向,引导无人机飞回起点B。但是由于全自主智能无人机在进行航行拍摄的过程中,可能会发生由于突发情况造成航飞中止或者返航位置错误的现象,导致无人机飞向错误返航点D。为了避免以上问题,可通过回归算法从全自主智能无人机航飞位置对返航位置进行推测,同时继续执行航行拍摄任务。
回归技术一般被应用于预测和发现变量间的因果关系[2]。断点续飞回归算法按照数据统计学原理可以对大规模数据进行处理,获取因变量和部分自变量的相关关系,因此本文采用该算法构造相关优化回归方程。
本节按照全自主智能无人机航行轨迹、中断位置等自变量与返航位置因变量间的相关关系,构造下述线性回归方程:
(1)

通过上述数据,可以达到无人机断点续飞的目的,提高拍摄效率,保障无人机顺利航行。
1.2 无人机航线设计
在确定航行位置、保障航行不断点的情况下设计航测路线。为了建立完整的模型,通常要求超过60%的航向重叠度与超过30%的旁向重叠度。航线弯曲会对航向重叠的一致性产生影响,若弯曲程度大,那么在一定程度上会导致航拍漏洞[3]。全自主智能无人机体积小,质量轻,在空中的抗风能力相对较差,提高抖动幅度。经大量数据表明,全自主智能无人机航拍偏航可达15 m,像片旋转角约为10°,为后续立体测图带来困难[4]。本研究通过飞控定位定姿数据,对全自主智能无人机航拍航线进行整理。
全自主智能无人机飞控数据会对拍摄时相机地理位置、航向角、俯仰角、翻滚角进行记录。为了便于分析,把经纬度坐标(B,L,H)转变成大地坐标(Xs,Ys,Zs),其中L代表经度,B代表纬度,H代表高度。也就是获取所有照片的大概位置元素,然后结合相机参数,通过共线条件方程把像方坐标转变成物方坐标,公式如下:
(2)
式中:f为相机焦距;Z为测车辆区域平均高程;Xs、Ys、Zs为相机映射中心物方空间坐标;α、β、γ为通过影像的3个外方位角元素构成的9个方向余弦;(x,y)为像点坐标;(X,Y)为对应地面坐标。
将全自主智能无人机起降与转弯时的像片删除,通过剩余像片形成航线[5]。在形成航线时,利用求解像片中心点偏转角δ判断像片是否属于某条航线,在δ低于既定阈值的情况下,把像片添加至航线中,阈值依据全自主智能无人机航摄技术规范获取。通过像片中心点偏转角形成航线,见图2。

图2 航带形成示意图
依据飞行顺序对预处理后像片进行排序,记作(l1,l2,…,ln),n为预处理后像片总量。通过像片中心点偏转角形成航带,详细过程为:
初始取i=1,j=2,k=1,把li与lj添加至航带Qk。
1) 对像片li与lj的中心点方向角φi,j进行求解,取下一个像片lj+1,同时求解像片lj与lj+1的中心点方向角φi,j+1,获取φi,j与φi,j+1的夹角公式为:
δ=|φi,j-φi,j+1|
(3)
2) 如果δ低于阈值,那么把lj+1添加至航带Qk,再假设i=j,j=j+1,重复进行步骤(1)。
3) 如果δ超过阈值,那么假设k=k+1,新建航线,把φi,j+1添加至新建航线Qk,再取j=j+2,i=j+1,重复进行步骤(1)。
4) 在j=n的情况下,也就是将全部像片添加至对应航线后停止。
按照设计的航行路线进行航拍任务,利用全自主无人机采集河道航测数据。对数据进行分析处理,进行三维建模。
1.3 航拍数据采集处理
针对复杂的河道,全自主智能无人机采集的图像数据量很大,测量范围很广,航摄路径长,同时结构复杂,当前通过传统河道测绘方式无法有效实现测绘数据的输出和整理[6-7]。通过全自主智能无人机对河道进行航拍,能够完成对航行轨迹和点位坐标的输出,是一种精准高效的方式。
航测数据是通过数值摄影测量得到的,也就是所有沿航行轨迹方向位置的差异均是因为视差造成的。其利用计算机完成相邻影像的匹配,判断所有像素视差,通过空中三角测量自适应求解,获取像方坐标,利用计算获取被拍摄物体的物方空间坐标,把视差转换至相对或绝对地面高程。
采集高精度三维河道信息的重要问题为影像匹配,也就是怎样通过计算机替代人眼完成立体观察,获取同名像点。针对全自主智能无人机相机,为了避免相机畸变产生的影响,按照相机检验参数与扫描坐标完成中心定位,同时获取准确的扫描坐标。为了获取可靠的影像匹配结果,需构建分层金字塔影像,形成近似核线。核线即通过左右摄站与被摄河道周围构成的平面和像平面的交线。若像点(p,q)属于左影像的相同核线,则其同名像点(p1,q1)在右影像上也属于该核线,上述核线被称作同名核线,则有:
(4)
(5)
其中:(u,v)与(x,y)分别为倾斜像片与水平像片坐标;λ、σ、θ分别为独立像相对方位元素的函数。
因为每条核线和u方向是平行的,同时左右核线的v坐标是一致的,所以降低了v方向的搜寻区间。引入金字塔降低u方向的搜寻区间,令整个搜寻空间尽量减小。借助分层金字塔影像与核线影像,即可对一些同名点进行采集,然后利用平差求解立体相对的相对方位元素与像方坐标,获取航测数据。
针对当前全自主智能无人机航测数据和影像,可按照相对定向获取的影像匹配点和矢量采集特征点实现三维影像配准。在此基础上,本研究利用Pix4Dmapper软件对全自主智能无人机航测影像与数据进行三维建模处理[8]。该软件基本流程用图3进行描述。
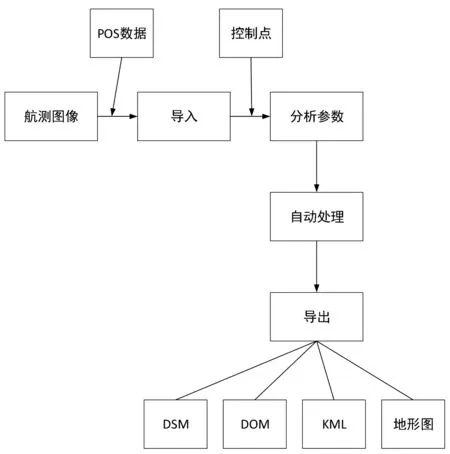
图3 软件基本操作流程
分析图3可以看出,通过全自主智能无人机对河道图像进行航拍,在保证航向与旁向重叠率的情况下,即可利用Pix4Dmapper软件实现对采集航测影像与数据的三维重建,利用三维建模可以辅助治理河道污染源。
1.4 河道面源污染辅助分析
面源污染通常是由于种植业、养殖业等农业污染造成的,污染物一般从支流或渠系流入河道干流,也就是污染主体沿河道分布,且涉及面积大,污染情况相对复杂,因此针对河道污染问题的测绘工作也非常复杂。
在上述算法和模型分析的基础上,给出河道治理时污染点位提取步骤:
1) 确定测绘区域,沿河道对测绘区域进行划分。
2) 沿着划分的河道测绘区域完成初步的航测,对核心部分进行检测。
3) 在初步航测的基础上,对面源污染部分进行识别,针对关键区域需完成进一步的交叉测量。
利用河道面源污染点采集和加权线性内插法完成测绘处理,加权线性内插法公式描述如下:
(6)
其中:G(S0)为S0点的预测结果,也就是插值;n为和S0点相邻的已知点的个数;ωi为参与预测的已知点的权重;G(Si)为当前样本点Si的测量结果。
权重值的计算公式如下:
(7)
其中:di0为已知样本点Si和插值点S0间的间隔。
上述插值技术为准确插值,适于数据分布相对密集、同时分布相对均匀的情况。完成对河道治理过程中面源污染点位的提取后,通过加权线性内插法完成求解,能够有效显示河道治理过程中关键测绘区域和其他区域的不同。同时对污染区域进行进一步的细化插值处理,便于重点分析,从而实现河道治理过程中面源污染处理。
2 全自主智能无人机在河道治理工程中的应用
本研究以某地区某河道治理工程为例,进行全自主智能无人机在河道治理工程中的应用分析。
2.1 河道淤积治理
针对河道清淤,调查目标河道淤积点时,需对淤积位置、高度和施工道路布置等进行分析。本研究通过全自主智能无人机采集研究河段三维地形数据,对不同淤积点特征信息进行分析,然后通过三维地形规划解决河道治理中的淤积物堆放问题。
首先通过本文研究方法对目标河段航线进行规划,并进行目标河段航拍处理。本研究处理河段采集的航拍图片共262幅,将采集图片导入Pix4Dmapper软件中进行处理。按照采集图像间的特征点完成对研究河段地形三维点云数据的解译,见图4。
图4 研究河段航拍图像三维点云数据
图4中标识部分即为淤积点位,通过软件对淤积特征进行提取,获取淤积特征信息,为后续淤积部分检测提供依据。通过D26-全自主智能无人机航拍技术对研究河段进行摄影,把处理形成的文件添加至地图软件中,通过相关测量功能快速采集河段中不同淤积点长度、宽度与面积等信息。通过地图软件的测量功能对上述淤积点关键指标进行测量,然后通过各淤积点三维航测数据对淤积点水平面上的平均淤积高度进行估测,最后依据水下淤积深度获取淤积点清淤放量,详细数据用表1进行描述。图4中从上至下标识依次记作淤积点1-淤积点6。

表1 研究河段淤积量统计结果
分析表1可以得出,研究河道的整体淤积方量采用无人机测量的方式效率高,淤积方量估算结果较为精确。
2.2 水体异常点检测
在进行河道治理的过程中,因为河道水环境问题非常复杂,针对各种类型水环境问题需进行详细的识别和分析,以完成对河道水环境综合问题的分析。针对各种涉及河道水环境的问题,需按照无人机轨迹确定结果对水体污染异常位置进行识别,同时获取异常点位置输出结果。按照得到的异常点位置输出结果,令无人机进行进一步航测,重点针对所有异常点完成全景航测。无人机全景航测图像可通过点云合成软件完成处理,按照无人机坐标点位对不同问题点信息进行采集识别,为河道治理提供依据。见图5。
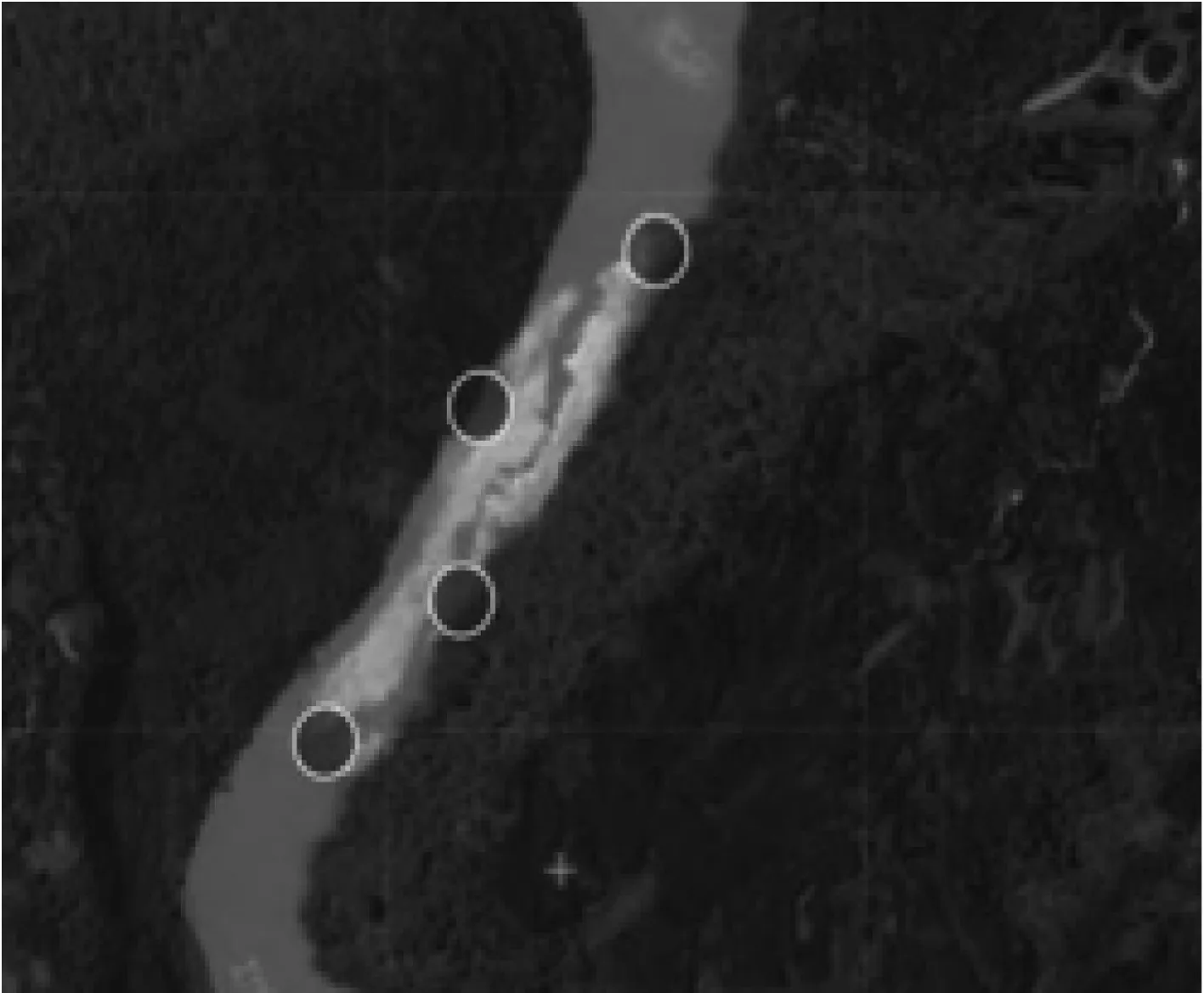
图5 水体异常标识
图5中,依据无人机巡航影像对4处河段水体异常部分进行了标识。利用无人机可更加直接地完成对水体异常位置的识别,对航测内容进行规划,并对无人机航测工作进行改进,提高在其在河道治理工程中的应用性。
2.3 无人机测量精度测试
将上述实验调查的统计结果指标作为衡量指标,验证本文全自主智能无人机航测数据精度,并将其和文献[9]方法、文献[10]方法进行比较,结果见表2。

表2 本文方法采集精度测试
分析表2可以看出,本文通过全自主智能无人机进行数据采集,90%以上的采集数据绝对差值低于2 m,占比为91.55%。而文献[9]方法只有59.75%的采集数据绝对差值低于2 m;文献[10]方法只有60.03%的采集数据绝对差值低于2 m。对比得知,本文方法采集数据精度可靠,质量好,能够达到河道治理工程应用的要求。
3 结 论
将全自主智能无人机应用于河道治理时,充分发挥了无人机的优势,解决了河道信息采集工作范围广、约束因素多、精度要求高等问题,有效避免了传统采集技术的不足,增强了河道治理可靠性以及效率,减少了人力物力资源的使用。全自主智能无人机不但能够在河道治理的前期工作发挥很大的作用,而且在后续河道治理方案规划以及实施等方面也有重要意义。
无人机的应用不只限于河道治理,针对其他复杂工程,如电力巡航、环境工程、地质灾害普查等,无人机也能够进行有效的辅助工作,未来在越来越多的工程领域,无人机应用将越来越广泛。但本文方法存在前期建设投资成本高、准备流程复杂的问题,后续研究中应该针对这一点进一步完善与提升。