合成孔径声纳重叠相位中心与惯性导航系统联合估计运动误差算法
2021-05-06张羽王朋刘纪元钟荣兴韦琳哲迟骋
张羽, 王朋, 刘纪元, 钟荣兴, 韦琳哲, 迟骋
(1.中国科学院 声学研究所, 北京 100190; 2.中国科学院 先进水下信息技术重点实验室, 北京 100190;3.中国科学院大学, 北京 100049)
0 引言
合成孔径声纳(SAS)是一种高分辨率成像声纳,其原理是利用小孔径基阵沿方位向匀速直线运动、形成一个虚拟的大孔径,对虚拟大孔径内的回波解耦进行匹配滤波处理,从而得到不随距离变化而仅与基阵尺寸相关的方位向高分辨率。SAS实现高分辨率成像的关键是平台沿着理想直线航迹做匀速运动,但在实际工作中,海浪、暗涌或自身运动不稳定等因素会影响声纳平台的航行轨迹,导致其产生运动误差。运动误差会造成声纳成像结果出现畸变、散焦、重影等现象,降低图像质量。因此,需要对运动误差进行补偿[1]。运动补偿按照运动误差数据源的不同,分为基于运动测量系统的运动补偿、基于回波数据的运动补偿和图像域自聚焦。基于运动测量系统的运动补偿是利用安装在声纳平台的高精度运动传感器测量并记录声纳的姿态、速度等信息,通过坐标转换、积分等运算获得声纳的运动轨迹,从而得到运动误差。其中,运动测量系统通常包括惯性导航系统(INS)、多普勒测速仪(DVL)、全球定位系统(GPS)和深度计等。基于回波数据的运动补偿是对前后两帧回波信号做相关运算,利用相关系数反演出运动误差,称为基于重叠相位中心(DPC)算法。图像域自聚焦则是在图像域提取相位误差并将其消除[2-3]。
近年来,国内的SAS运动补偿研究主要沿着运动测量系统和回波数据两个方面分别展开。文献[4-5]分别研究了改进型粒子滤波和卡尔曼滤波在SAS运动测量系统中的应用,通过多传感器数据融合方法提高运动误差的估计精度,该方法难点在于选取合适的系统模型。文献[6]考虑了回波沿斜距向的空变性,对传统基于回波数据的DPC方法进行改进,采用分段DPC拟合出运动误差,对大测绘带成像声纳的改善效果较好。文献[7]针对双侧成像声纳,提出了基于双侧回波DPC方法,区分出不同类型的运动误差,获得了比单侧补偿更好的成像结果。
国外的SAS运动补偿研究则以运动测量系统与DPC方法相结合为主。文献[8-9]将DPC看作辅助传感器,对其数据预处理后输入滤波模型,与INS、DVL、GPS、深度计等多种运动传感器数据进行融合估计运动误差,甚至在某些水声环境良好的时刻,直接用DPC取代运动传感器计算运动误差。文献[10-11]认为DPC结果中包含着海底地形起伏和介质传播特性等信息,是实现精确补偿必须要考虑的关键要素。因此,使用DPC数据与INS数据之间的差值修正INS,得到了更准确的运动误差估计结果。文献[12]基于拖曳式低频SAS开展了DPC、INS与GPS 3种传感器数据融合的运动补偿研究,其中GPS数据来自水面舰。虽然在外参标定过程中采用了较多的近似处理,融合过程略显粗糙,但是成像结果依然表明了数据融合的有效性。
此外,国内外一些机构还开展了DPC联合INS服务于导航系统的研究,其目的是将DPC技术应用在水下导航领域。虽然应用背景有别于运动补偿,但二者技术手段非常相似,都采用多传感器数据融合的方法,利用DPC估计横荡误差和纵荡误差精度高的特点,弥补INS长时间工作容易产生积累误差的缺点。文献[13]研究了搭载SAS的水下无人平台在无GPS情况下的自主导航问题,使用DPC辅助INS获得了比DVL辅助INS更准确的航行轨迹。类似地,文献[14]比较了DVL、DPC、陀螺仪、INS等多种传感器不同组合方式对导航结果造成的影响,研究结果验证了DPC辅助INS的可行性和优越性。
运动补偿的好坏与运动误差估计的准确性直接相关,无论是运动测量系统还是DPC,本质上都是为了获得声纳的实际航迹,从而计算实际航迹与理想航迹的偏差。随着对声纳回波研究程度的不断加深,越来越多的DPC相关算法被相继提出,鲁棒性和准确性也在逐渐提高[15]。文献[16-17]充分利用多子阵优势,使用回波数据空间互相关矩阵估计声纳前行速度,可以达到与DVL测速相近的结果。另外,考虑到运动测量系统往往包含多种传感器,系统复杂度高且存在数据冗余。如果声纳自身数据能够辅助测量运动参数,代替功能重复的传感器,则不仅有利于降低系统复杂度,还可以节省空间、节约成本。
基于以上背景,本文提出一种SAS DPC+INS运动误差估计算法,首先使用DPC声相关测速取代DVL多普勒频移测速的核心功能,获得声纳的前行速度,然后根据矢量运算法则换算出声纳在载体坐标系下的三向速度,最后建立卡尔曼滤波模型,融合DPC的速度与INS的加速度,获得声纳速度的最优估计值,用于计算运动误差。通过分析试验数据发现,DPC+INS方法可以有效提高运动误差估计准确度,改善目标重影、散焦的情况,提高图像质量。
1 多子阵SAS声相关测速
为了提高测绘效率,SAS通常采用多子阵的配置,即单个发射阵和多个接收子阵搭配的模式。多子阵的配置促使SAS领域产生了利用回波数据的相关性估计声纳运动参数的DPC方法。沿距离向对等效相位中心的两帧回波数据分析,重叠相位中心的相关函数峰值到相关序列中心的偏移量反映了前后两帧信号之间的时延,换算成空间的距离就是声纳的横荡误差。沿方位向对等效相位中心的两帧回波数据分析,通过相关函数最大值确定重叠的等效相位中心的位置,根据等效相位中心之间的间隔计算出声纳沿方位向移动的距离,即可得到纵荡误差。本文使用的DPC方法属于后者,对回波信号沿方位向处理获取纵荡误差,进而换算成声纳前向速度。
根据波形不变性理论[18],只要SAS相邻两帧的等效相位中心存在重叠,通过对这两帧回波数据求相关,利用相关系数即可解析出声纳的运动参数[19-20]。在多子阵空间互相关矩阵中,重叠相位中心对的个数与脉冲重复周期以及SAS基阵的前向速度,三者之间存在等式关系。通过等式关系得到声纳基阵的前向速度后,按照速度矢量分解法则,结合偏航角和俯仰角,便可计算出声纳前向(方位向)、距离向和垂向3个方向上的速度。
1.1 等效相位中心假设
SAS一般采用单发多收的配置,其中发射阵与接收阵是分置的。为了处理方便,引入“等效相位中心”假设,把分置的发射阵和接收阵等效成一个收发共置的虚拟阵元,该虚拟阵元的位置处于发射阵和接收阵的中心,即假定声波的发射路径和接收路径是一致的。如图1(a)所示。图1中,A点为发射阵T和接收阵R的等效相位中心,rt为真实的发射路径,rr为真实的接收路径,声程r′的2倍近似为rt与rr之和,d为发射阵和接收阵之间的间隔,B为目标。由等效相位中心假设所引入的声程误差与d和r′有关。对于收发间距分米量级,探测距离百米量级的成像声纳,声程误差一般较小,可忽略不计[21]。图1(b)给出了单发多收阵的一系列等效相位中心示意图。

图1 SAS等效相位中心Fig.1 SAS equivalent phase center
1.2 多子阵空间互相关矩阵估计前向速度
选取合适的前行速度,保证SAS等效相位中心在前后两帧之间存在重叠,即可利用回波数据的相关性解算出声纳斜距向和方位向的位移。如图2所示,假设声纳存在N个等距排列的等效相位中心,编号依次为{1,2,3,…,N-1,N},相邻两个相位中心之间的间距为l. 声纳以vy(y表示方位向)的速度沿方位向匀速前进,从第k-1帧时刻到第k帧时刻,声纳沿方位向产生了位移Δy,由于运动误差的存在,声纳同时在斜距向上产生了位移Δx′(x′表示斜距向)。

图2 重叠相位中心声相关测速原理Fig.2 Principle of acoustic correlation velocity measurement by DPC
假定在这两帧时刻之间有p对相位中心完全重叠,定义PRT为第k-1帧与第k帧的时间间隔,称为脉冲重复周期,则重叠相位中心对的个数、脉冲重复周期以及声纳前进速度存在如下等式关系:
Δy=(N-p)·l=vy·PRT,
(1)
因此,只要确定了等效相位中心重叠的个数,就可以计算出声纳的前向速度。
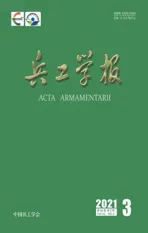
根据波形不变性理论,如果前后两帧有重叠的等效相位中心,则这两个相位中心的回波数据具有较大的相关性。按照(2)式对第k-1帧第i个通道的回波信号与第k帧第j个通道的回波信号取互相关,得到互相关系数ci,j,
(2)
式中:1≤i≤N;1≤j≤N;corr[·]表示相关运算;si,k-1(m)表示第k-1帧通道i接收到的回波信号,m为距离向时间变量;sj,k(n)表示第k帧通道j接收到的回波信号,n为距离向时间变量。

(3)
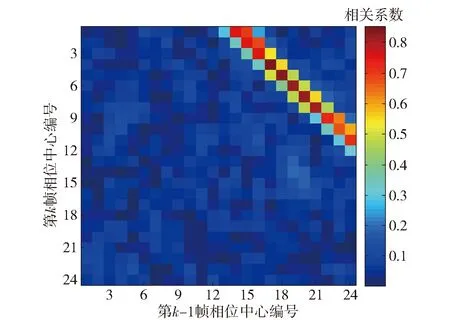
图3 脉压后回波信号互相关矩阵Fig.3 Spatial mutual correlation matrix of echoes after pulse-compression
必须指出,利用回波数据空间互相关矩阵仅能估计出声纳的前向速度。当声纳在前后两帧出现如图2所示的不平行情况时,该方法等效为把第k帧时刻基阵的位置(实线)近似为与前一时刻平行的位置(虚线)。
1.3 声纳三向速度关系式
实际工作中,声纳在前后帧之间不仅会产生方位向的位移,而且受水流或自身运动不稳定等因素的影响,声纳还会产生斜距向的位移,该位移由横荡误差和升沉误差组成,分别沿着声纳载体坐标系的距离向和垂向。将一对重叠的等效相位中心得到的两组数据进行相关,通过相关峰与相关序列中心之间的偏移量可计算出斜距向位移,但传统的DPC方法并不能够直接区分出横荡误差和升沉误差。文献[6]采用分段DPC和最小二乘法拟合出横荡误差和升沉误差,文献[7]采用双侧DPC方法通过解方程的形式计算出横荡误差和升沉误差,均增加了计算量。考虑到DPC方法本身存在一定的估计误差,多次运算叠加容易产生积累误差,而SAS配备有高精度INS,能够输出角度误差数据,结合1.2节计算出的前向速度,对速度矢量按照矢量运算法则进行分解,利用前向速度和角度误差解算出距离向速度和垂向速度。
声纳与INS之间属于刚性连接,运动过程中具有相同的角度误差,包括偏航角、俯仰角、横滚角。下面将声纳看成1个点,在载体坐标系下对其速度矢量v进行分析。如图4所示,声纳前进方向指向y轴,φh、φp分别表示偏航角与俯仰角,可将速度矢量v分解为沿距离向x、方位向y和垂向z3个方向的速度,分别为vx、vy、vz,其与v之间的等式关系可表示为
(4)
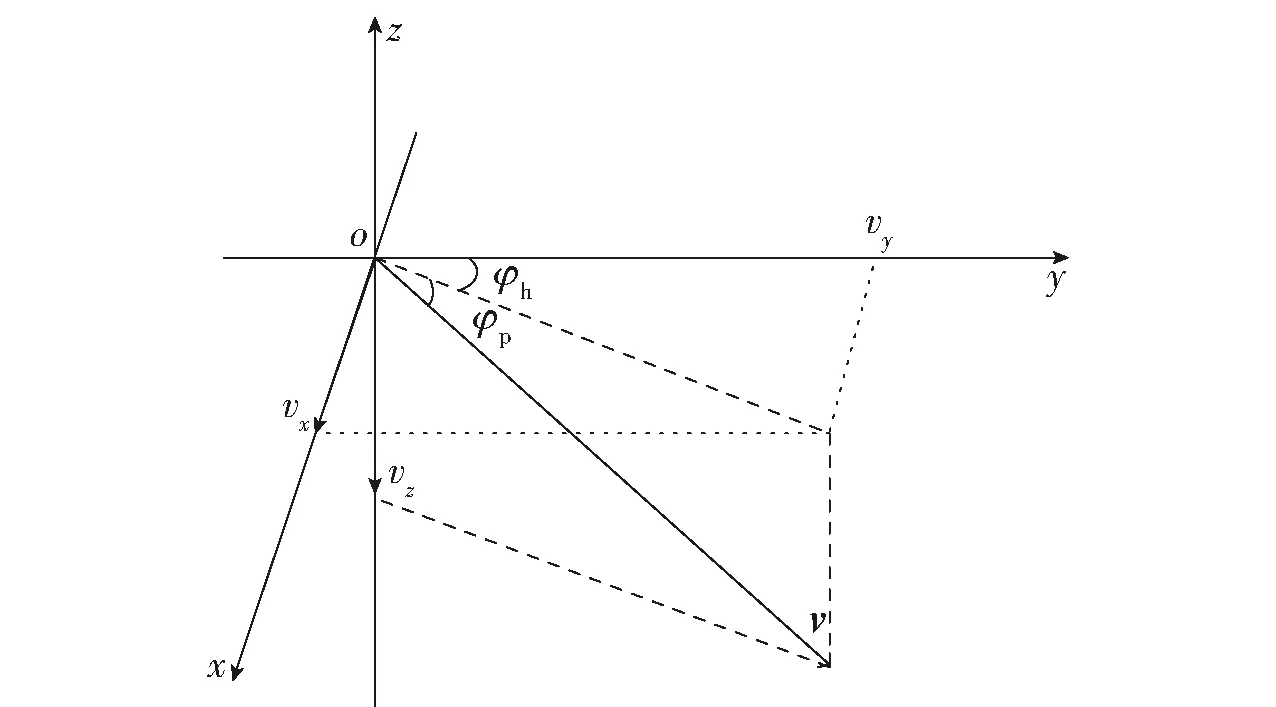
图4 声纳速度矢量分解图Fig.4 Vector decomposition diagram of sonar velocity
由此,根据1.2节计算的前向速度vy可以得到
(5)
2 DPC+INS算法
准确地,vx、vy、vz是DPC方法估计出来的速度,相比于声纳真实速度仍存在误差,而INS可以输出声纳的加速度。按照多传感器数据融合的思想,采用卡尔曼滤波技术对二者的数据进行融合,能够克服单个传感器的不确定性,提高速度数据估计的准确度,称为DPC+INS算法。对速度积分得到声纳的实际航迹,采用最小二乘法拟合出理想直线航迹,运动误差即为实际航迹与理想航迹之间的偏差。
2.1 DPC+INS模型
图5 DPC与INS数据融合模型Fig.5 Data fusion model of DPC+INS
DPC联合INS的目的是将DPC估计的方位向、距离向、垂向速度与INS测量的方位向、距离向、垂向加速度进行融合,图5给出了DPC+INS数据融合模型。首先对回波数据进行相关运算,估计出声纳的方位向速度vy;然后结合INS输出的姿态角对速度矢量分解,解算出声纳的距离向速度vx和垂向速度vz;接着将距离向、方位向、垂向三向速度连同载体坐标系下INS输出的距离向、方位向、垂向加速度ax、ay、az以及姿态角一并输入卡尔曼滤波器进行滤波;最后输出声纳速度估计值,同样包括距离向、方位向和垂向3个方向的数据。
2.2 DPC+INS数据融合方法
在数据融合前需要对数据进行预处理,由于载体坐标系是随着平台的运动而变化的,为了方便后续计算运动误差,需要使用固定不变的坐标系。因此,按照(6)式将载体坐标系下的速度数据vx、vy、vz和加速度数据ax、ay、az分别与姿态转换矩阵相乘,得到地理坐标系下的速度数据vn、ve、vu和加速度数据an、ae、au:
(6)
式中:vn、ve、vu分别表示北向速度、东向速度和天向速度;an、ae、au分别表示北向加速度、东向加速度和天向加速度;Th、Tp、Tr分别为偏航角φh、俯仰角φp和横滚角φr的转换矩阵,角度误差数据来自INS.
根据速度与加速度之间的关系,DPC+INS系统方程可描述为线性方程,量测量为DPC的三向速度和INS的三向加速度,滤波时间间隔为1个脉冲重复周期PRT.
使用完全状态法建立状态方程如下:
(7)
式中:
(8)
(9)
(10)

建立量测方程如下:
(11)
式中:Z6×1表示vn、ve、vu、an、ae、au的量测值;H6×6表示6×6阶的量测系数矩阵,
(12)
η6×1表示量测噪声,为白噪声。

图6 卡尔曼滤波流程Fig.6 Kalman filtering process
根据线性系统理论,把状态方程和量测方程离散化,选定部分参数初始值。卡尔曼滤波遵循最小均方误差准则对量测值进行递推滤波,按照图6所示的流程迭代,不断更新状态估计值。一个滤波周期包括了时间更新和量测更新两个过程,分别体现了状态预测和状态估计的思想。图6中:0为状态量初始估计值;P0为估计均方误差初始值;下标k为采样时刻;Pk为估计均方误差;Φk|k-1为一步转移阵,由F6×6离散化得到;Γk-1为系统噪声驱动阵;Qk和k分别为系统噪声方差阵及估计值;Pk|k-1为一步预测均方误差;k为状态量6×1离散化的结果;k|k-1为状态一步预测值;Zk为量测量Z6×1离散化后的结果;Hk为量测阵;Rk和k分别为量测噪声方差阵及估计值;Kk为滤波增益;I为单位矩阵。
经过卡尔曼滤波后得到状态量的估计值,即为DPC数据与INS数据融合后的结果。选取状态量的前3个变量{n,e,u}作为声纳东北天三向的速度,相当于把DPC作为主数据源,而INS的作用是在DPC的基础上不断增补和丰富一些信息。
2.3 运动误差的计算与补偿
多子阵SAS的运动误差分为角度误差和平动误差,对其中单个阵元而言,角度误差本质上是以平动误差的形式影响回波数据。因此,运动补偿的关键是计算出平动误差。根据文献[6]的分析,平动误差中横荡误差和升沉误差对回波相位影响最大,相位误差Δψ近似表示为
(13)
式中:λ为声波波长;Δx为横荡误差;Δh为升沉误差;α为声纳掠射角。
可见相位误差是关于横荡误差和升沉误差的函数,下面将对实际航迹分析,计算横荡误差和升沉误差。如图7所示,设初始时刻的位置O为原点,对声纳东北天三向速度{n,e,u}积分可得到声纳的实际航迹{sn,se,su},记为曲线s,第k帧时刻的实际位置为Sk;利用最小二乘拟合方法,获得声纳理想的直线航迹{s′n,s′e,s′u},记为s′,第k帧时刻的理想位置为S′k;目标在B点. 则根据图 7虚线框内的几何关系,横荡误差和升沉误差分别为
Δx=|SkB|cosα-|S′kB|cosα,
(14)
Δh=|SkB|sinα-|S′kB|sinα.
(15)
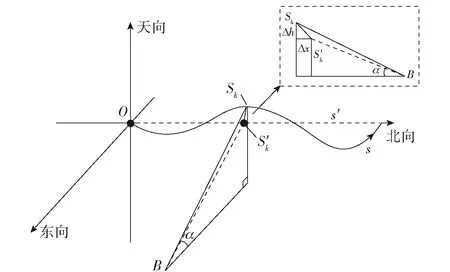
图7 声纳运动轨迹与误差模型Fig.7 Model of sonar trajectory and motion error
将横荡误差和升沉误差代入(13)式,得到相位误差,通过频域补相的方式补偿原始回波,即可实现运动误差的补偿。
3 数据分析
为验证DPC+INS算法的有效性,选取2018年项目组在某水库典型地貌区域采集的高频SAS数据进行分析。声纳系统参数如表1所示,根据表1中参数,结合第2节的知识可知,等效相位中心间距为0.05 m. 实际工作时,前后两帧的相位中心约有一半可重叠,为前向速度的估计提供了重要支撑。多子阵空间互相关矩阵结果参考图3,不难发现,前一帧通道1~通道11与后一帧通道14~通道24形成1条亮度最大的直线,表明该条直线上的相关系数最大。
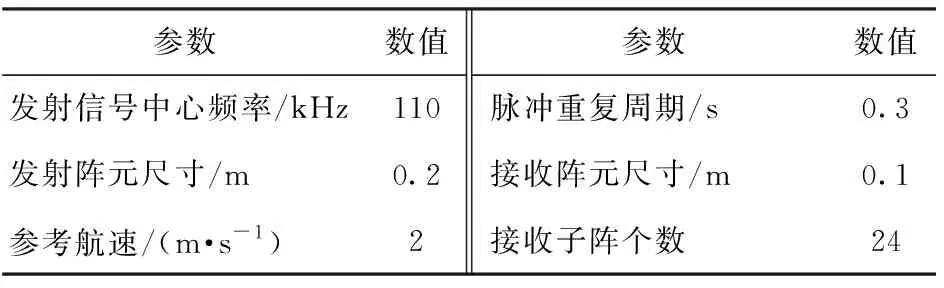
表1 SAS系统参数Tab.1 System parameters of SAS
图8给出了该航次的姿态角变化曲线。由图8可以看出,整段数据在80 s时间内航向角变化约15°,属于变化较大的情况,而俯仰角和横滚角的变化较小且相对平稳。
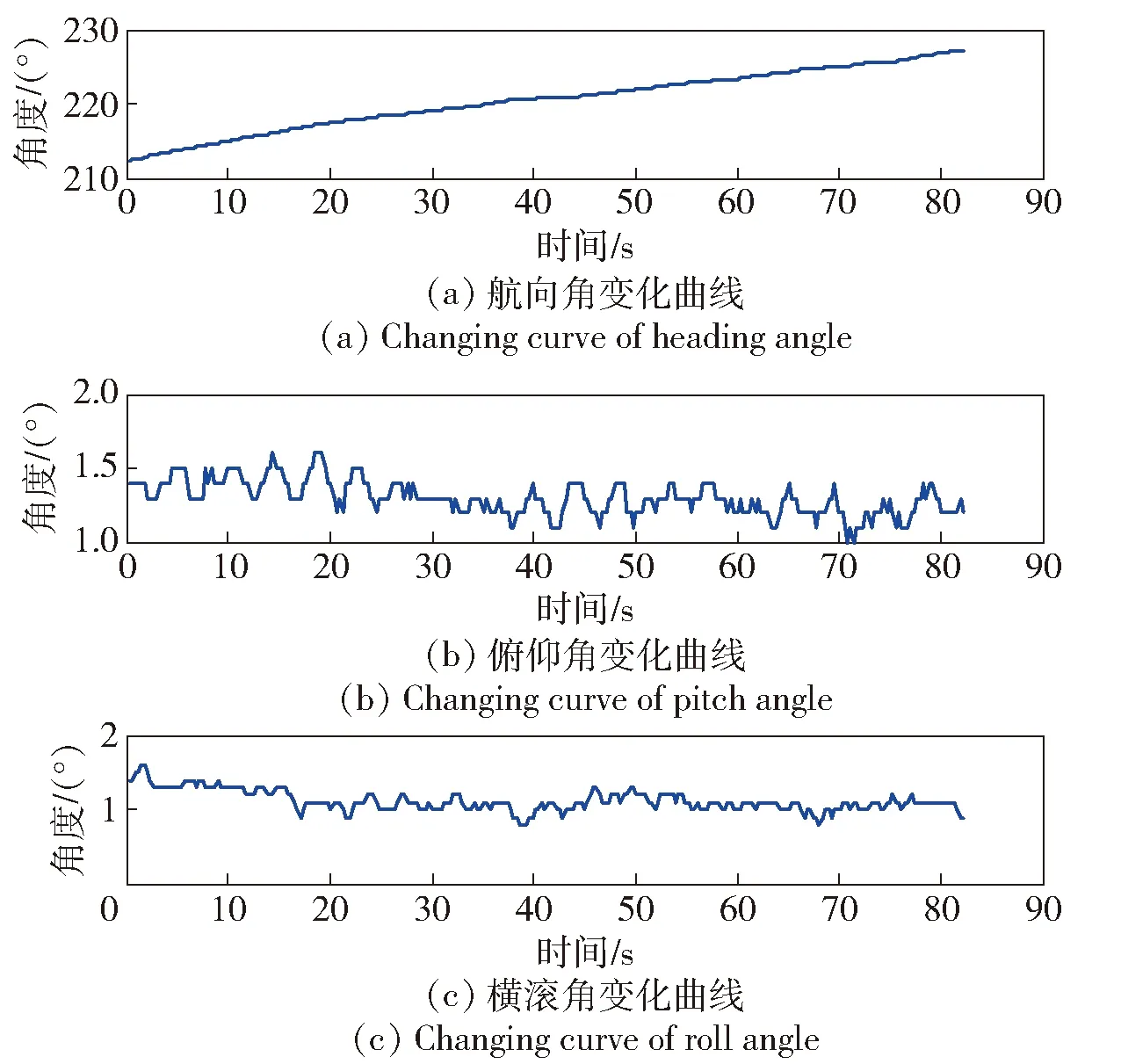
图8 某航次声纳姿态角变化曲线Fig.8 Changing curves of sonar attitude angle

图9 声纳三向速度曲线Fig.9 Curves of sonar three-dimensional velocity
图9给出了使用DPC+INS算法得到的北向、东向和天向速度估计结果。为了便于对比,引入DPC方法形成对照。从图9中的曲线趋势可以看出,DPC+INS算法估计的结果与DPC方法估计的结果大体趋势相同。细致观察图9(a)和图9(b)不难发现,DPC速度曲线比较平滑,而DPC+INS相比于DPC,曲线上带有许多毛刺,这是因为DPC的速度融合了INS加速度,增加了很多细节成分。图9(c)的天向速度曲线中,DPC+INS算法振荡明显较大,经过分析,发现是INS天向通道数据不稳定引起的。但由于天向速度数值较小,天向位移(升沉误差)对回波的影响并不如东北向位移(横荡误差)大。
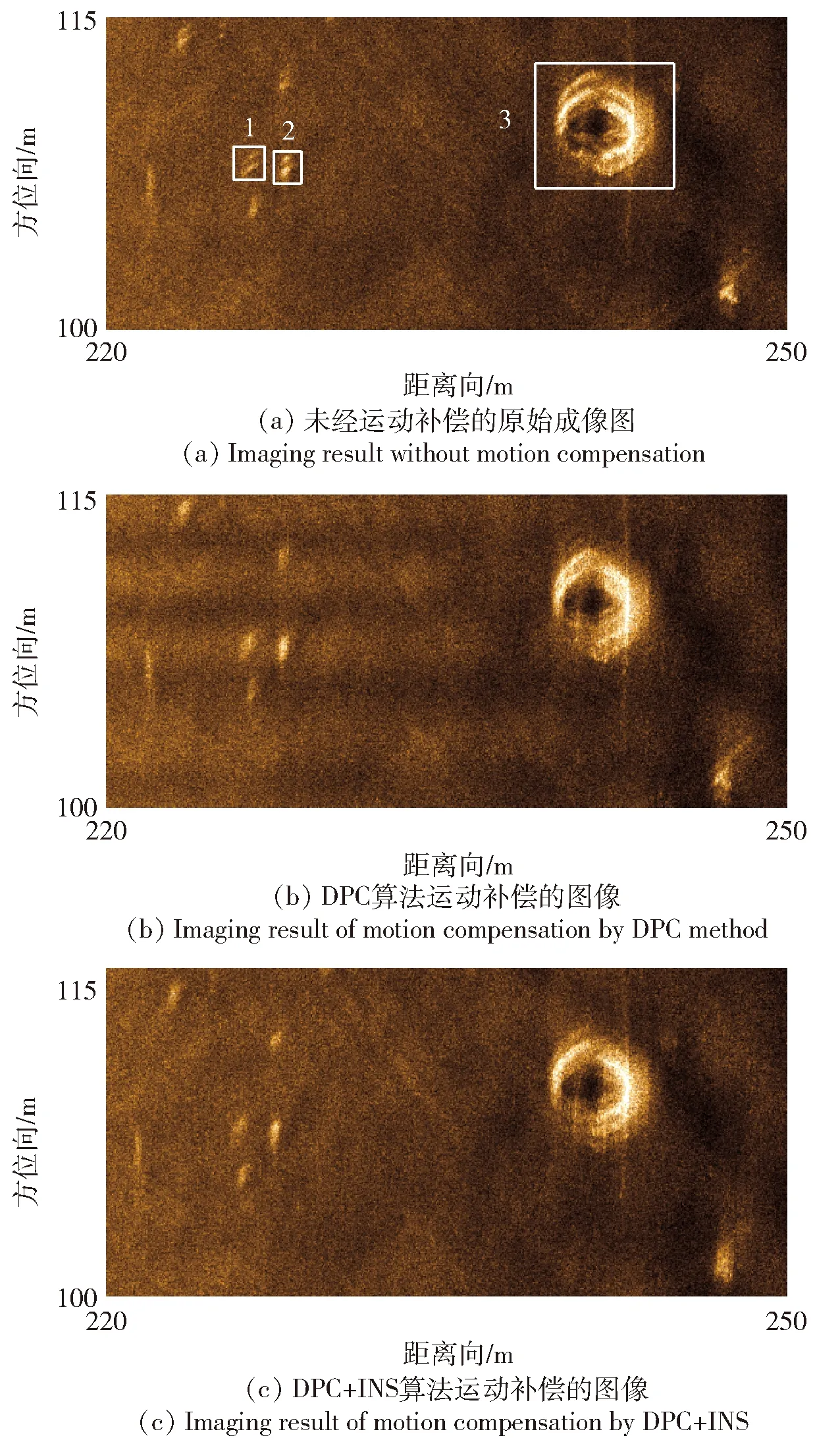
图10 地貌成像结果Fig.10 Topography imaging results
使用多子阵ωK算法[22-23]对该航次数据进行成像,结果如图10所示。其中图10(a)是未经运动补偿的原始成像图,受运动误差的影响。从图10(a)可以看到:框选区域1和2处目标均存在方位向的重影,单个目标成像结果却是2个,相当于引入了虚假目标;框选区域3的目标同时存在散焦和重影的现象。图10(b)为使用DPC方法补偿的图像,相比于图10(a),解决了框选区域1和2方位向重影的问题,但框选区域3的底部依然存在较严重的散焦。图10(c)是使用DPC+INS算法补偿的图像,整体成像效果较好,与图10(a)相比,解决了框选区域1和2处的目标方位向重影的问题;与图10(b)相比,框选区域3处目标散焦的情况也有所改善,表明DPC结合INS算法估计运动误差更准确。也就是说,将INS数据与DPC数据融合,可以达到比单独使用DPC算法更好的效果。
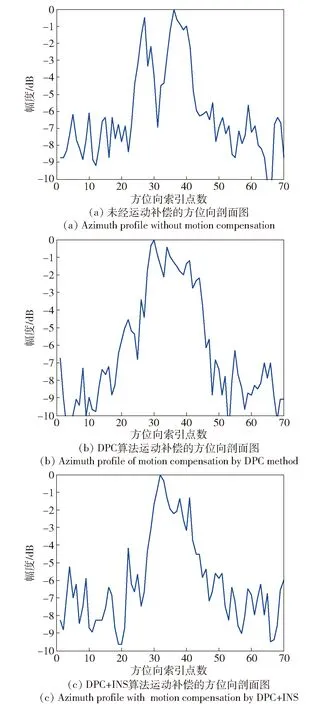
图11 目标2方位向剖面图Fig.11 Azimuth profile of Target 2
为了客观地评价不同算法的补偿效果,下面对目标的成像质量做进一步比较。参照合成孔径成像性能指标,给出图10中目标2的方位向剖面图,结果如图11所示。从图11(a)中可以看出,未经运动补偿的目标2在方位向上存在多个波瓣,能量较分散,且副峰的峰值较高,因此出现了图11(a)中目标重影的情况。观察图11(b)和图11(c)可以发现,经过运动补偿后,目标2的能量集中在主瓣,聚焦效果得到明显改善。相比之下,DPC+INS算法的补偿效果比DPC算法更好一些,不仅降低了峰值旁瓣比,还减小了主瓣宽度。
表2给出了不同情况下目标2方位向的性能指标,包括峰值旁瓣比和主瓣宽度。通过对比性能指标可知,DPC+INS算法运动补偿效果的最好。

表2 目标2方位向性能指标Tab.2 Azimuth performance index of Target 2
4 结论
为了降低系统复杂度,提高SAS回波数据的利用率,本文将DPC方法与INS相结合,提出一种DPC+INS算法。利用多子阵空间互相关矩阵解算出声纳前向速度,通过INS姿态角计算出DPC三向速度,并采用卡尔曼滤波融合DPC三向速度与INS三向加速度,求解声纳速度的最优值计算运动误差。基于湖试数据对算法进行了验证。所得主要结论如下:
1) DPC结合INS估计三向速度是可行的,DPC+INS算法相比于DPC方法,融合INS的加速度数据,增加细节信息,提高了声纳速度估计的准确性,为运动误差的计算提供了重要支撑。
2) 通过对比原始数据成像图,DPC+INS算法和DPC方法均能提高图像质量,解决目标重影的问题。相比之下,DPC+INS算法补偿效果更好,能够有效改善目标散焦的情况。