一种适用于多极旋变的高精度编码器跳码监测评估方法
2021-04-30侯锦,王鹏
侯 锦,王 鹏
(1.中国电子科技集团公司第39 研究所,陕西西安 710065;2.陕西省天线与控制技术重点实验室,陕西 西安 710065)
利用多极旋转变压器作为角度传感器的轴角编码器广泛应用于各种测控、遥测、遥感和通信天线,对于卫星测控、遥测接收和卫星通信轴角编码器读取多极旋变的精通道和粗通道的数据进行组合,获得满足测角精度要求及指向控制的高精度的角度数据[1-8]。
多极旋转变压器是一种获得天线角度的传感器设备,可以提供较高的角度分辨精度。轴角编码器通过采集旋转变压器的返回信号,经过编码芯片的解码,组合不同通道的采样值获得天线运动轴上的绝对位置。它是天线系统实现控制和完成测角任务的重要设备。
角度跳码是使用多极旋转变压器编码经常遇到的问题,角度组合、安装结构、旋变或者旋变编码信号采集通路出现问题时均可触发跳码,此时设备处于故障状态,不能进行角度闭环,对于遥测接收和卫星测控中的角度引导工作方式将不能工作,引起目标丢失、数据丢失,导致工作异常或任务失败。由于缺乏对于角度编码的监测,设备状态恶化到一定程度才出现故障,角度跳码常常作为一种突发故障,对于设备和任务影响大、危害大[9-12]。
1 多极旋变的高精度编码原理
多极旋转变压器是由一对极旋转变压器组成的粗测量通道和P对多极旋转变压器组成的精测量通道组成,P值越大,极对数越多。高精度编码器使用多极旋转变压器进行角度位置测量以提供高精度的编码,为保证编码精度,测控站多选择64 极的旋变作为编码感应器件。
以多极正余弦旋转变压器为测角元件,高精度编码器使用RDC 转换器实现正、余弦模拟电信号向数字信号的变换,根据数字化编码位数精度匹配关系,获得方位轴、俯仰轴位置角度编码。
编码过程为激磁信号发生电路的振荡器经过功率放大器将输出信号作旋变的激磁信号源,并通过调整电路给RDC 转换电路作基准信号,RDC 器件将来自旋变的模拟信号转换为二进制数字角度信号。单片机CPU 负责角度数据的处理,读取的二进制数字角度原始信息,依据角度编码规则(编码角度范围与采样位数的对应关系)对二进制数据进行组合,分别得到系统内每个旋变对应的角度信息。最后通过数据总线将数据按照接口要求送至外部设备,如图1所示。
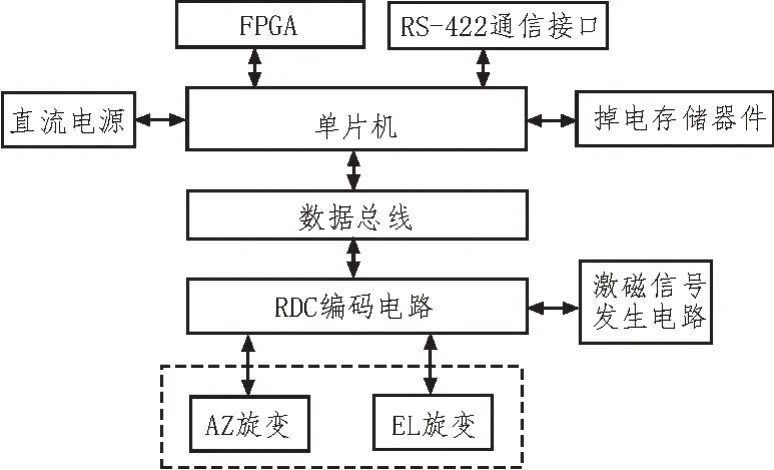
图1 编码器组成
为获得满足精度要求并提供测量坐标系内的角度值,在编码的过程中需要进行粗码和精码的角度组合以及编码零值校正。
角度组合模块在每个控制周期中根据旋变极数和编码精度要求将RDC 采样编码得到的二进制原始数据和对应的编码位数要求,进行精粗通道的组合,形成覆盖运动轴(如转台式天线的方位和俯仰轴)运行范围的角度值。零值校正模块根据初始化读取的角度零值对编码后的角度值进行角度标定的修正,得到满足测量坐标系要求的系统轴系工作角度值。
以极对数为1∶64 的多极旋转变压器为例,粗通道为1 对极,精通道为64 对极,转子在空间绕轴旋转一周,定子绕组中的粗通道电势则按正、余弦规律交变一周,而精通道的电势则按正、余弦规律交变64 周,粗通道输出电压的有效值变化周期为360°,而精通道的输出电压有效值变化周期为360°/64=5.625°。
根据设备编码精度需要和旋变极数,采样RDC的二进制数与精粗角度产生对应关系,在此基础上,对精粗数据进行组合,获得需要的角度值。在组合的过程中,由于旋变安装、传输线路等因素,精粗数据存在一定的不同步,这里称之为相位差,当差值异常时将产生角度组合匹配异常,可引起跳码。
2 多极旋变的编码评估方法
根据前文的分析,精码和粗码的相位关系即相位差可作为跳码实时监测的特征项,依据组合编码的原理,相位差还可作为故障分析、状态评估的特征项,系统通过采集角度数据的原始数据并根据其组合方式,对原始数据和相位差进行分析。通过对特征项的期望值和实际采集、计算数值之间作差生成残差信号,并用残差信号表征相对于标准运行状态的偏差,基于此残差即可对系统当前状态进行判断[9-14],如图2 所示。
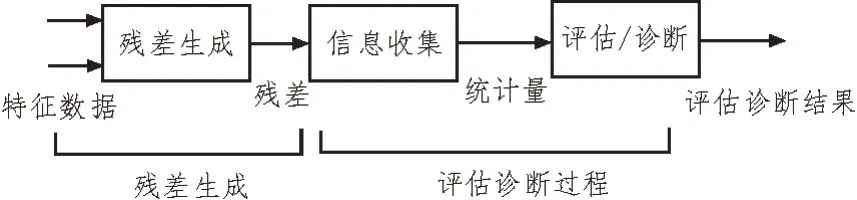
图2 系统故障诊断、评估模式
跳码评估预警方法主要功能为通过对旋变精、粗采样编码的原始数据进行处理和分析,在特征项相位差的基础上结合编码模型,获得当前编码的状态,并根据数据变化的规律和趋势,完成编码、监测、评估和由相位匹配产生跳码的预警。通过对测量计算产生的处理结果进行存储,并在编码过程中对测量数据分析形成数据变化的规律和趋势,作为模型参数,经过模型和参数对比得出结果。测量数据在编码器的掉电可存储器件中进行存储,以便于在编码过程中进行读取和分析比对。
对于设备首先需要以一个正常的状态作为初始状态,以此为基础,对设备其后的运行状态进行监测和评估。以64 极旋变为例,根据编码精粗数据组合原理,360°被划分为64 个编码段,在每个编码段内,粗码角度与精码角度值对应,并由精码提供更高精度的编码数值,可以取粗码在64 个编码段上的角度值,与精码值比较,计算两者的角度差,并将该值归一化到以0~360°表示的相位值,这样就计算出了粗码对精码的相位差。
在整个编码范围内测量并记录Φ值,形成一组Φ(Φ1~Φn),Φ的采样点数不少于编码范围对于5.625的整数倍,根据硬件设计提供的存储空间确定采样点数,提高采样密度可增加分析评估对不同原因引起角度跳变的适应性。对整个Φ的数据队列,根据Φ的最大值和最小值确定用于设备初始编码的修正值Φ0,一般来说由于结构加工及安装的不同心,产生的相位差为近似的正弦曲线,其曲线越平坦则表明同心度越好,链路相位的一致性较好,如图3、图4所示。
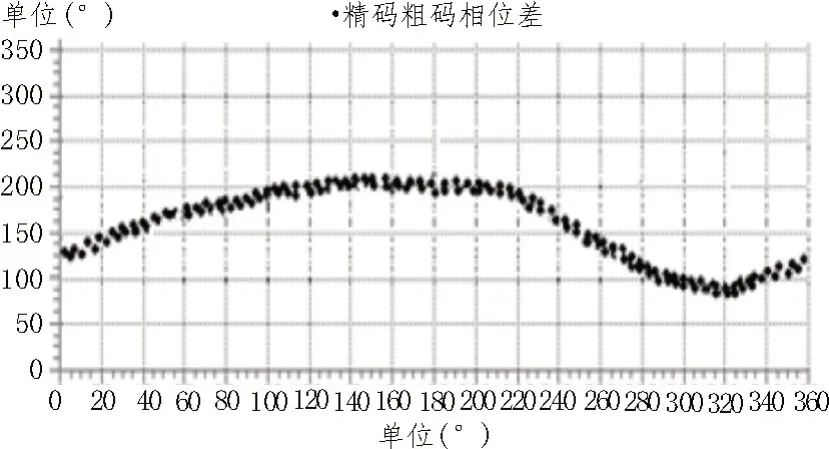
图3 粗精相位差(方位支路)
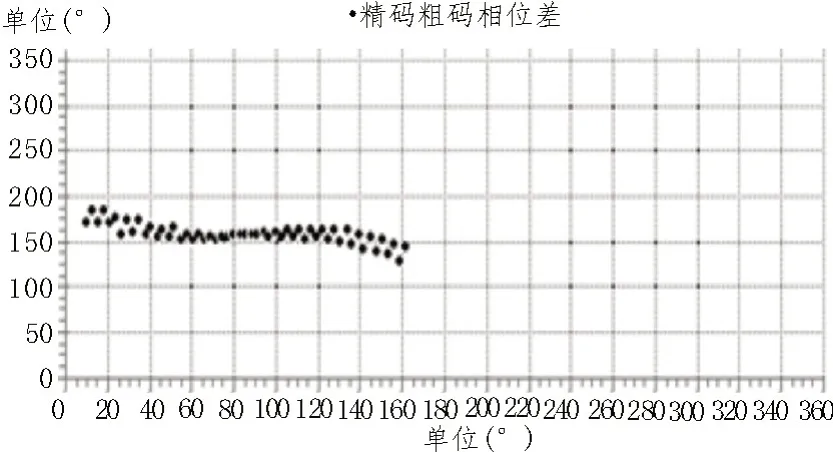
图4 粗精相位差(俯仰支路)
在系统编码测试和调试阶段,一般会对精粗组合时的相位进行叠加数值修正,通过填入一个固定的Φ0,对精粗组合的角度进行整体修正,可使该曲线位于相位180°位置,使角度组合时上下相位处于裕度最大的位置,以使设备在初始状态下在任意位置的角度组合满足编码规则不发生跳码,并保证系统对于可能产生的结构变形、传输相位变化等问题具有最大的适应性,Φ0一般可取最大与最小值的均值。
如图5 所示相位差不满足组合要求,对其进行相位修正,叠加一个相位值使初始相位差满足要求,如图6 所示。
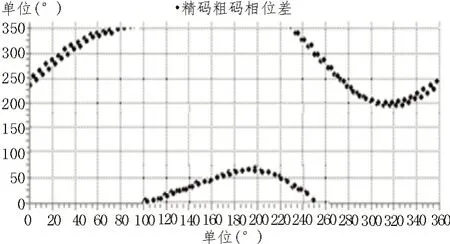
图5 修正前粗精相位差(方位支路)
在此基础上获得修正Φ的数据队列在编码范围(如方位为0~360°、俯仰为0~180°)角度上的相位差值Φi和角度值θi,作为设备评估的初始参考值,作为系统进行条码监测、评估和预测的基础数据进行记录,在设备启动时读出并在设备运行编码时进行实时相位计算并比对。
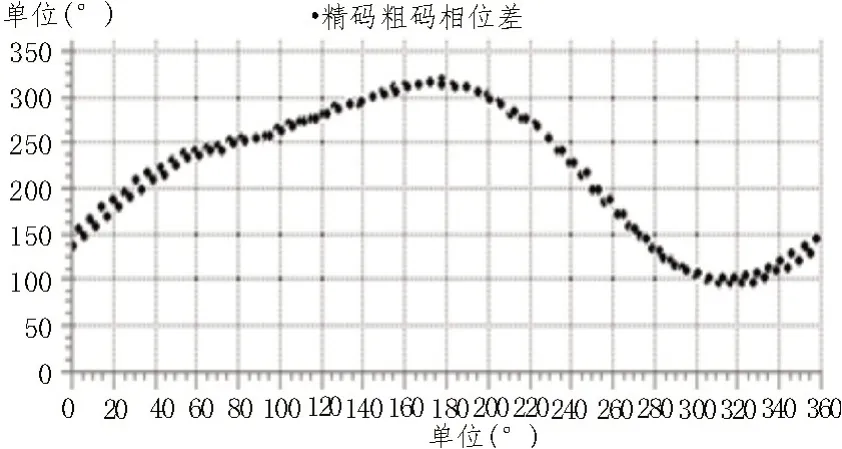
图6 修正后粗精相位差(方位支路)
在设备运行时,根据读取的实时数据计算当前精、粗采样编码的相位来对编码原始信息进行实时监测和评估,当前精、粗采样编码的相位值Φj与初始记录的Φ队列进行数据拟合计算当前的理论相位差ΦT,计算两者的差值,同时以ΦT作为基准计算可能产生跳码的相位门限ΦΔ,最后借助精粗角度变化协助进行预警。考虑到编码设备为小型化嵌入式系统,其计算和存储有一定的限制,并且拟合精度不需要很高,保持在1 度的分辨率即可,因此拟合方法可采用常用的线性拟合,如下:

其中,Φ为相位差,θ为角度;可根据计算评估给出设备状态:
1)健康:ΔΦ小于门限的20%;
2)正常:ΔΦ小于门限的80%,大于门限的20%;
3)异常:ΔΦ小于门限的100%,大于门限的80%;
4)故障:ΔΦ大于门限的100%。
3 工程应用和编码器设计实现
由于结构变形、设备长时间运行、电缆短线或老化引起的跳码均可在粗、精的相位差上表现出来。目前,这种方法已在包括二代导航在内的多套固定和车载测控、遥测设备上进行了测试验证并开展了工程应用。这些设备的天线控制单元利用串行接口读取编码设备的粗支路和精支路的原始数据实现精粗数据组合,在对精粗通道的相位差进行计算和分析的基础上,实现编码状态的实时监测、相位曲线的回执及修正值的确定。
通过该方法已诊断并解决了多类跳码故障,在设备日常运行中对相位变化趋势的持续监测,可有效对编码跳码进行评估和预警,并对突发的编码跳码故障进行报警和诊断。
通过在嵌入式高精度编码器中集成该方法使常规的编码器具备评估、预警和故障诊断的能力,利于系统实现该部件的状态监测和故障预警等健康管理功能;同时利用编码器对外的数字接口,向外部设备上报相关的评估预测信息,可支持上位机及远程评估、预测和诊断[13-15],是天线系统实现健康管理功能的基础。其主要硬件组成及软件扩展如图7 所示。
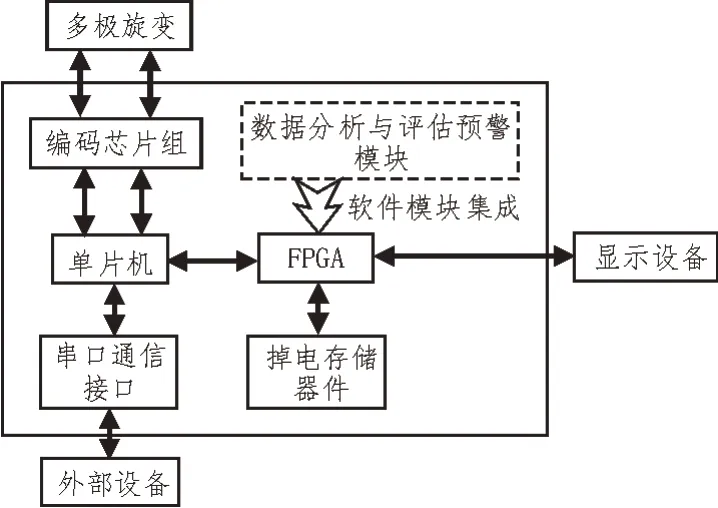
图7 主要硬件组成及软件扩展
在高精度编码器设计时,可根据跳码评估方法对数据处理的要求选择掉电存储器件的容量,以每度一点的记录采集为例,360 点的相位存储需要的容量约为720 Byte,在硬件设计上可利用现有参数存储的掉电存储数据接口按需扩展存储容量。软件监测与评估预警功能通过增加评估预警软件模块,在编码周期中将相位基于模型的估算与实际计算进行比对,这样在不改变原有高精度编码器的硬件结构、不影响原有软件功能和流程的前提下实现功能的快速部署[16-17]。
软件在读取精码和粗码的二进制数据组合成满足精度要求的角度时,可在精粗码组合前,增加一个模块,用于计算精码和粗码的相位差,并与初始的正常相位进行比对来实现在编码器工作过程中实时进行角度跳码监测和预警,其工作流程见图8,模块可生成编码状态标志,可作为编码状态的一部分向外部输出。标志为报警时,由天线控制单元根据标志决定采取哪些保护措施;当输出为角度可用时,编码器程序按照原有设计流程执行;在进行实时相位计算的过程中,还可根据编码原理,对实际的编码相位裕度进行比较和记录,当裕度小于门限时,表明需要对该编码支路上的旋变、线路、结构件产生的相差进行调整并据此进行维护检修[18-19]。
4 结束语
多极旋变的高精度编码器的跳码评估方法通过对编码原始数据进行监测和分析,可以对设备当前的编码状态进行实时监测和评估,对故障进行隔离和定位,利用与预警门限的比判实现对可能发展为跳码的故障进行预警,有效解决编码器角度跳码这一突发故障问题。
编码设备使用者可以通过评估和预警数据,在日常运行中及时对设备进行检查和维护,避免在任务或者日常运行中出现跳码故障,实现设备预防性维修,适应当前设备使用和维护需求。针对多极旋变的高精度编码器的跳码评估方法用于高精度编码器可保证编码精度和原有各项功能、性能的前提下,解决编码设备由于安装不合格、长期运行、突发故障等导致的编码器角度跳变问题,基于编码原理、数据分析和故障模型,实现编码监测和评估预警。为工程应用提供了一种低成本、易实现且高效的方案。
