三相直接矩阵变换器模糊滞环控制策略*
2021-04-29张建伟王佳宇
张建伟 王佳宇
(1.内蒙古自治区电能变换传输与控制重点实验室 呼和浩特 010080;2.内蒙古工业大学电力学院 呼和浩特 010080)
1 引言
作为间接AC/DC/AC 变换器的有效替代方案,矩阵变换器具有以下“绿色”变频器的特点:①输入输出电流波形正弦;② 输入功率因数可控并且可控制到单位功率因数;③能量可以双向流动(四象限运行);④ 输出电压和频率可大范围自由调节;⑤ 电路简单且体积小,容易维护[1-2]。近年来涌现了大量有关矩阵变换器的相关研究,从各种角度证实了矩阵变换器的优越性能[3-6]。
有效的控制方法是实现矩阵变换器优越性能的重要条件。针对矩阵变换器的控制方法存在大量的研究[7-11]。很多有关矩阵变换器控制的研究都是以输出电压的调制为控制目标,如广泛使用的空间矢量调制(Space vector modulation,SVM)等。另外由于矩阵变换器中的开关数量众多,对应的开关状态也较多,因此开关函数的计算比较复杂,计算量也比较大,调制复杂是众多矩阵变换器的控制方法普遍存在的问题。
滞环电流控制是使用较为广泛的一种电流控制方法,具有响应速度快、不需要调制环节、结构简单且自带限流功能等优点[12-15]。滞环控制在逆变器上得到了广泛的研究与应用,但是有关矩阵变换器的滞环控制的研究还较少。
文献[16]将直接矩阵变换器的控制分为虚拟整流器和虚拟逆变器的控制,虚拟整流器采用的是相控方式,虚拟逆变侧采用的是滞环控制方法。这种控制方法并不是采用滞环控制方法直接对矩阵变换器进行控制。文献[17]利用滞环控制策略对使用矩阵变换器的永磁同步发电机进行控制。该文献只利用了矩阵变换器输入电压的最大值和最小值,因此是二位式滞环控制器,并且滞环宽度固定。文献[18-19]对矩阵变换器的滞环控制策略开展了仿真和试验研究。其控制方法与文献[17]中的类似,只利用了输入电压的最大值和最小值,属于二位式的滞环控制器。ZHANG 等[12,20]对矩阵变换器的滞环控制进行了详细说明,研究了固定环宽和正弦环宽的滞环控制策略,但也并未对三位式的滞环控制和变环宽滞环控制策略进行研究。
滞环控制器结构简单,不需要调制环节并且可直接控制矩阵变换器的输出电流,因此在矩阵变换器的控制中具有重要的研究意义与实用价值。考虑到上述问题,本文针对三相直接矩阵变换器的输出电流的控制,在二位式滞环控制器的基础上设计了三位式的电流滞环控制器。三位式的滞环控制器将输入电压分为最大、中间与最小,从而提高了控制的灵活性与准确性。考虑到固定环宽带来的问题,本文提出一种基于模糊控制器的在线调整滞环宽度的方法来提高控制器的性能。
2 矩阵变换器
三相直接矩阵变换器的主电路如图1 所示。矩阵变换器主要由九组双向开关元件(S1~S9)构成,每组双向开关由两个带有反并联二极管的半导体开关器件(如IGBT)组成,通过双向开关器件任一相负载可以和三相电源的任何一相连接。根据特定规则控制九个开关元件的导通和关断,可控制矩阵变换器的输出电压和输入电流,即
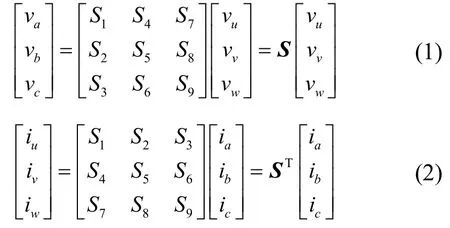
式中,S是开关传递函数,ST是S的转置。Si(i=1,2,3,…,9)的值为1 时,对应的开关导通,为0时则关断。通过控制开关传递函数,即开关S1~S9的状态即可实现对矩阵变换器的控制。为了避免输入电压源的短路而引起的过电流和输出感性负载开路而引起的过电压,往往需要添加开关约束条件,即(S1+S4+S7=1,S2+S5+S8=1,S3+S6+S9=1)。
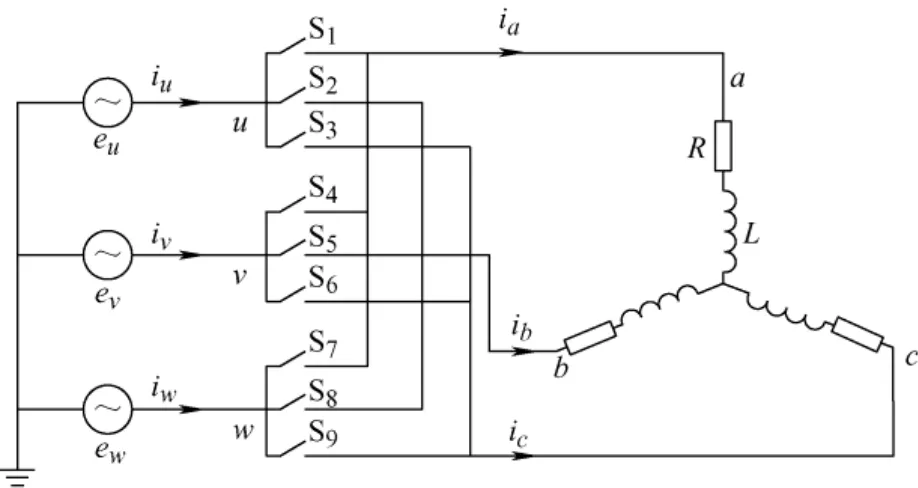
图1 三相直接矩阵变换器的主电路结构图
3 矩阵变换器的滞环控制
3.1 二位式滞环控制
利用滞环控制器可以确定矩阵变换器中的开关状态,从而实现对矩阵变换器输出电流的控制。考虑输出中的一相,矩阵变换器的二位式的滞环控制器的控制规则可以表示为
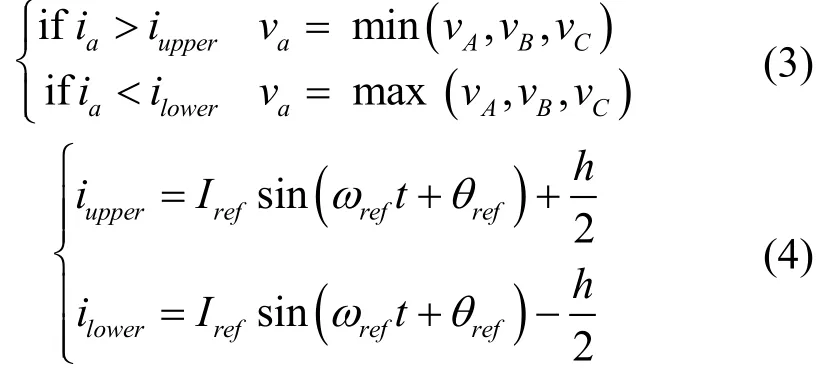
式中,Irefsin(ωref t+θref)=ia*为给定的参考电流;ia是测量的负载电流;h表示滞环宽度,环宽上、下限为[ilower iupper]。max/min(vA,vB,vC)选取当前时刻(vA,vB,vC)中值最大/最小的电压。该控制逻辑可以表述为当实际的电流超过上边界时,应该选择输入电压中最大的电压施加到该相的输出从而使该相的输出电流增加;当实际电流低于下边界时,应该选择输入电压中最小的电压施加到该相的输出从而使该相的输出电流减小。由此得到的控制结构框图如图2 所示。
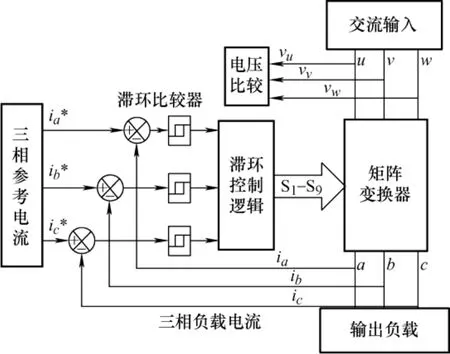
图2 二位式滞环控制系统结构图
3.2 三位式滞环控制
上述即为二位式的滞环控制,其中只用到了当前时刻最大或最小的电压。由于矩阵变换器的输出是三相,因此可以在二位式滞环控制的基础上设计三位式的滞环控制使电压的选择变为三种,以此来增加控制的灵活性与准确性。
三位式滞环控制器的输出,有-1、0、1 三种状态。与二位式的滞环控制相比增加了0 状态的输出,通过该状态选择三相输入中处于中间位置的电压。三位式的滞环控制器是在二位式的基础上改进的,该控制器可以看作两个二位滞环控制器的结合[13]。三位式滞环控制器的输入输出关系为
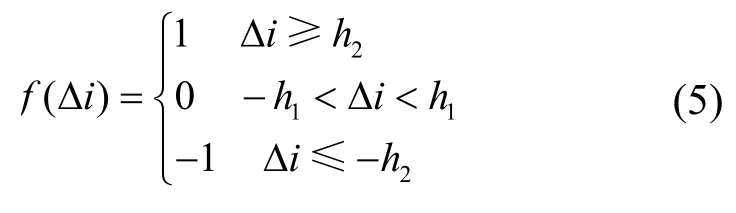
当输入Δi介于[-h2,-h1]和[h1,h2]时,f(Δi)输出保持前一个状态的值,这与二位式滞环控制器区间[-h/2,h/2]中的情况是一致的。式(5)中,Δi=ia*-ia为三位式滞环比较器的输入,f(Δi)为输出,h1和h2为两个滞环控制的滞环宽度。三位式滞环控制器的传输特性如图3 所示。
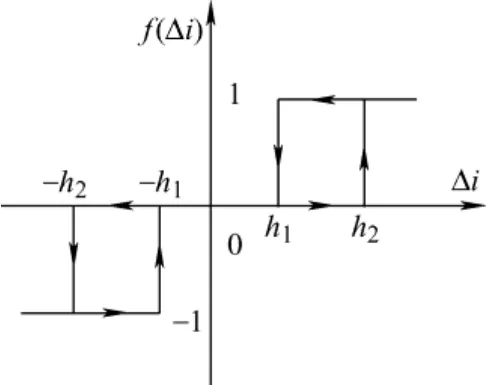
图3 三位式滞环控制器输入输出关系图
4 基于模糊控制的变环宽滞环控制
滞环宽度是影响控制效果的关键因素。以上二位式和三位式的滞环控制中的滞环宽度都是固定的。定环宽滞环控制方法具有动态响应速度快、鲁棒性好的特点,但是由于环宽固定,不能随系统运行情况进行调整,所以定环宽滞环控制方法的控制精度、开环器件的开关频率以及THD 值受环宽影响较大,从而不能精准地实现逆变器输出电流的控制。如果环宽选取得偏小,控制效果与精度较好,但是开关器件的开关频率较高,开关损耗也会较高。如果环宽选取的偏大,开关频率和损耗会降低,但是控制效果和精度会随之下降。针对上述问题,本文基于模糊控制器来设计滞环控制器,使滞环宽度能够随着系统工作状况的改变而在线调整。
模糊控制是一种非线性控制方法,并且不需要系统的模型。模糊控制中输入量的数量称为模糊控制器的维数。模糊控制器的维数越高,系统控制的效果就越好,但是控制器的复杂程度和实现难度也越大。模糊控制器的维数较低时,控制虽然实现较为容易,但控制效果也较差[21]。
本文用给定参考电流和输出电流的差值来控制滞环控制器的带宽。将偏差电流Δi划分为5 个模糊子空间,语言值分别为:负大(NB)、负小(NS)、零(Z)、正小(PS)、正大(PB)。将滞环宽度hf划分为3个模糊子空间,语言值分别为:零(Z)、正小(PS)、正大(PB)。则有
偏差电流Δi基本论域为[-1,1],滞环宽度hf基本论域为[0,0.5]。为确保模糊控制器具有较高的灵敏度,在基本论域边界处,各变量的隶属函数选择梯形函数,偏差电流的中间隶属函数选择灵敏度较高的三角形函数。Δi与hf的隶属度函数如图4所示。
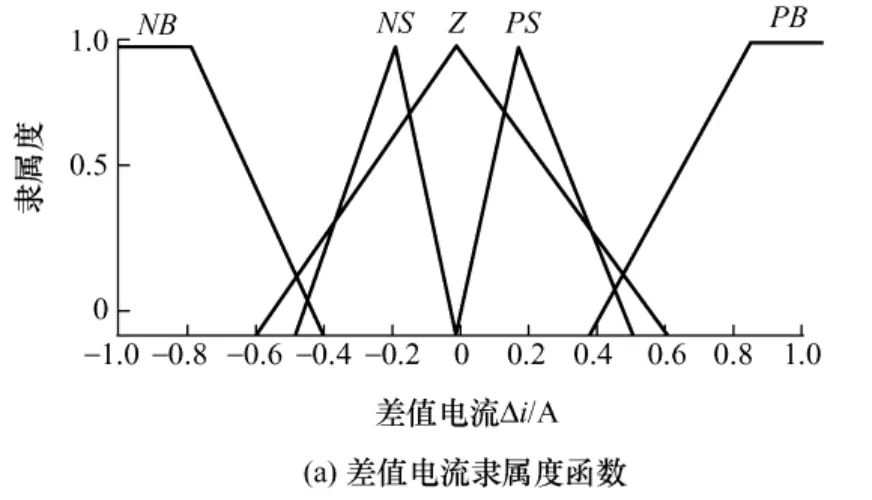
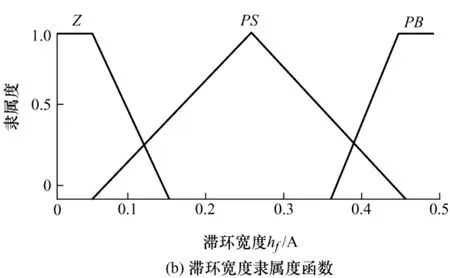
图4 隶属度函数
设计一维输入一维输出的模糊控制器,输入变量有5 个模糊语言子集,输出变量有3 个模糊语言子集,一共有5 条模糊控制规则,模糊控制规则如表1 所示。这样可以根据系统的运行状态在线调整滞环宽度,基于模糊控制的滞环控制器结构示意图如图5 所示。

表1 模糊控制规则表
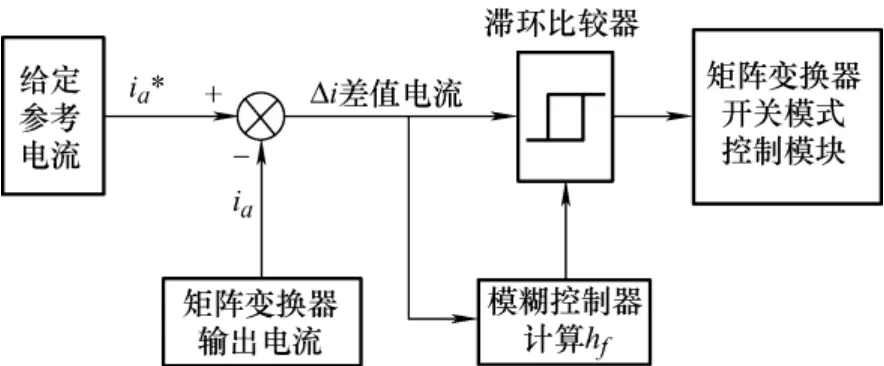
图5 基于模糊控制的变环宽滞环控制
5 仿真分析
为了验证所提方法的正确性和有效性,在Matlab/Simulink 仿真环境中搭建模型进行仿真分析。仿真参数设置如下:电源电压有效值为220 V,频率为50 Hz,负载为阻感负载,电阻值为10 Ω,电感值为30 mH,固定环宽滞环控制器中的环宽为0.02,采样时间为50 μs。
如图6 所示为矩阵变换器的二位式滞环控制的仿真结果。仿真中,输出参考电流的幅值为15 A,频率为50 Hz。图6a 为矩阵变换器的输出电流波形,可以看出二位式滞环控制器可控制矩阵变换器的输出电流并很好地跟踪参考电流。对应的谐波分析如图6b 所示,总谐波失真率THD 仅为1.75%,说明输出电流的波形较好。对应输出的线电压如图6c 所示,该波形由基波为50 Hz 的一系列的电压脉冲波形构成。

图6 二位式滞环控制器的仿真结果
三位式滞环控制的仿真结果如图 7 所示。h1=0.005,h2=0.01,其他系统参数与工况与前面二位式滞环控制器中的相同。由于在滞环控制器中增加了一种状态,对应的电压选择也增加了一种,因此控制的灵活性和准确性随之增加。通过对比图6 与图7 中的仿真结果,可以看出三位式的滞环控制器能够很好地控制矩阵变换器的输出追踪参考电流。而且与二位式的滞环控制相比,三位式滞环控制中的总谐波失真率THD 有所下降,变为1.28%。从电压波形上对比可以看出,三位式与二位式的滞环控制在开关频率上的差别并不大。
以上的二位式和三位式的滞环控制器中的环宽都是固定不变的。当系统运行状态改变时,固定的滞环宽度往往不能获得满意的控制效果。如果滞环宽度相对于参考电流太小,虽然电流波形比较好,但是将会导致过高的开关频率和开关损耗,过高的开关频率对半导体开关器件也是一个极大的挑战。反之如果滞环宽度占参考电流的比重过大,虽然开关频率和损耗会大幅下降,但是电流的波形就难以满足要求了。因而滞环宽度随着运行工况的改变而调整具有重要意义。
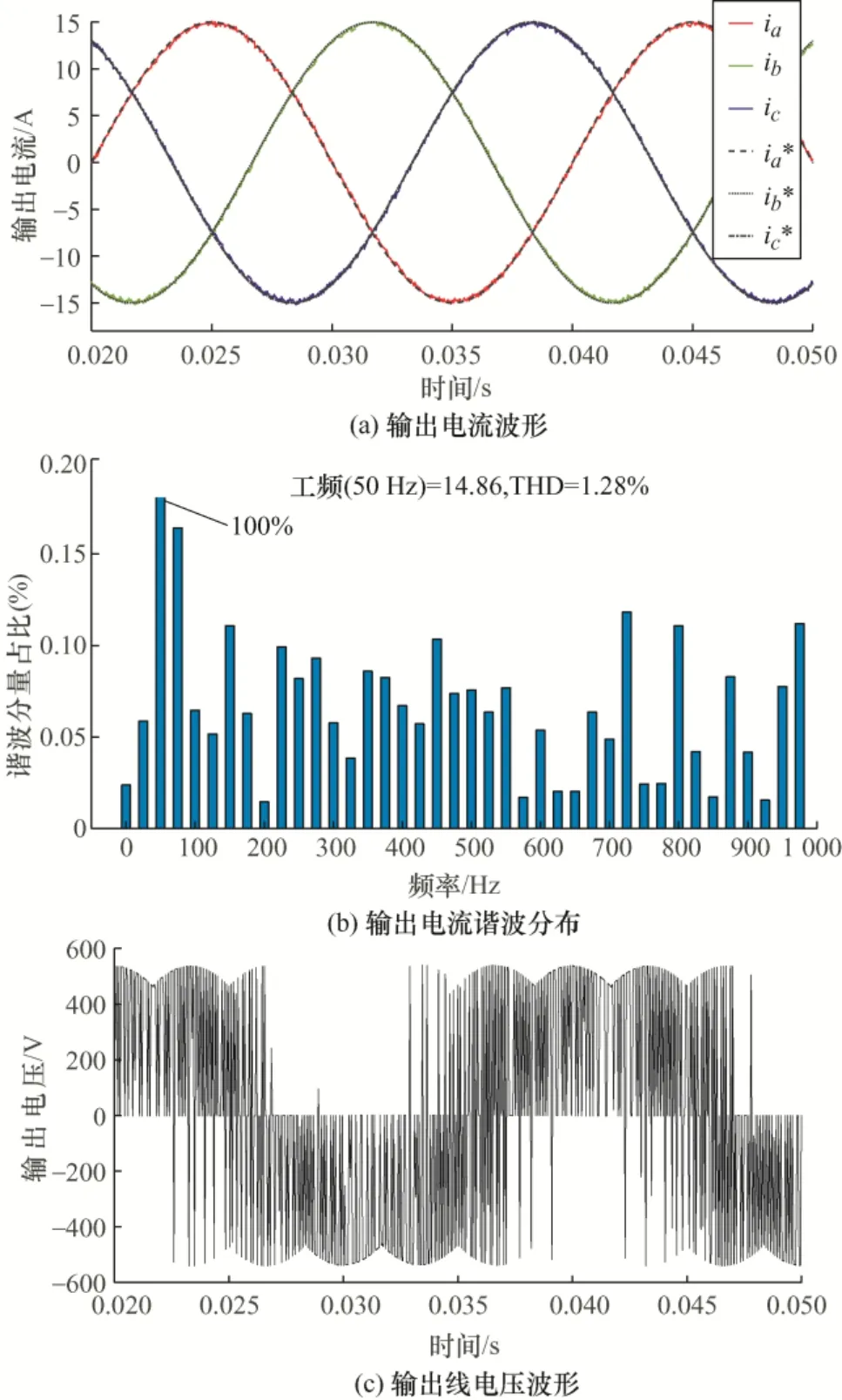
图7 三位式滞环控制器的仿真结果
基于模糊控制的滞环控制器可以根据系统的运行状况按照设计的模糊控制规则在线调制滞环宽度,相比固定环宽的滞环控制具有更好的适用性。基于模糊控制的变环宽滞环控制的仿真结果如图8 所示。图8a 所示为由模糊控制得到的滞环宽度,在实施三位式的滞环控制时,h1=hf/2,h2=hf。由图8b 和图8c 可以看出,基于模糊控制的变环宽滞环控制能够较好地控制矩阵变换器的输出电流。通过对比图6c 和图7c、图8d 可以看出,该方法中的开关频率要明显低于前面所述的固定环宽的滞环控制。
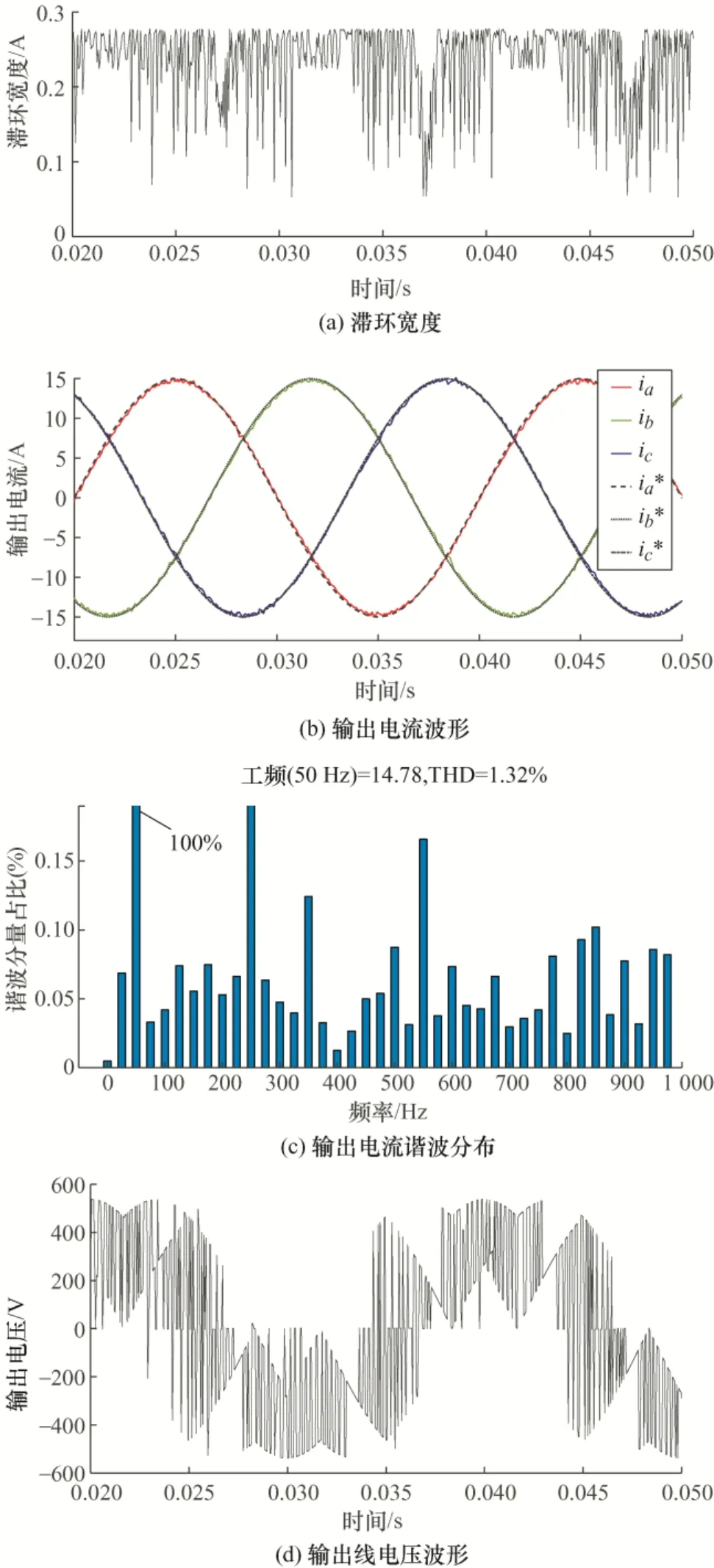
图8 基于模糊控制的变环宽滞环控制器的仿真结果
6 结论
滞环控制器具有结构简单、动态响应快、鲁棒性好而且自带限流功能等优点。但是有关矩阵变换器的滞环控制策略的研究还较少。本文针对三相直接矩阵变换器设计了滞环电流控制策略。研究结果表明二位式与三位式的滞环控制器均能够较好地控制矩阵变换器的输出电流。对比来看,三位式的滞环控制器比二位式的滞环控制器具有更好的灵活性与准确性。但是这两种方法中的滞环宽度不能跟随系统的变化而改变,因此当系统工况改变时,控制效果将受到较大的影响。针对以上问题,本文基于模糊控制研究了矩阵变换器的变环宽滞环控制策略,该方法中的滞环宽度能够跟随系统的运行情况在线调整,仿真结果表明模糊滞环控制方法可以有效地控制矩阵变换器的输出电流,并且具有更广泛的适用性。
