基于创新工程实践课程的战场无人救助车机构设计*
2021-04-28韩校粉孙立明董双领曹财铨李鑫虎
韩校粉,孙立明,杨 明,董双领,曹财铨,李鑫虎
(陆军工程大学石家庄校区车辆与电气工程系,河北 石家庄050003)
综合创新能力是大学生素质教育的核心,是大学生获取知识的关键和终身学习的保证[1]。创新工程实践课程是培养学生创新能力的主要课程之一,新时代军事教育方针提出要培养高素质、专业化新型军事人才,因此要对课程进行改革,将改革内容与新一轮的军事变革要求相联系,引入无人系统的设计理念,以提高课程内容的科学性与先进性;将创新工程实践课程的项目与科技竞赛相联系,以激发学生的战斗力,指引学生利用创新的思维发现并解决装备中的问题,逐步提高学生的各项素质,为造就无人领域高素质人才夯实理论基础。
1 战场无人救助车的研制背景
创新工程实践课程是依托机械结构设计拓展学生思维和培养学生创新实践能力的一门公共选修课程,主要采用项目管理的方法来锻炼和提升学生的综合实践能力。对于军事院校的学生来说,设计的项目必须立足于服务部队,与武器装备相关。当前,无人装备已成为武器装备发展的重要趋势,因此,要强化作战需求的牵引,充分利用各种资源,基于无人系统对创新工程实践课程进行科学改革,其目的意义主要体现在两方面。一是可以逐步培养无人作战领域高素质人才。无人系统技术综合性强,涉及的学科多,可以通过创新工程实践课程中的实际应用来引导学生学习所需的知识,通过项目来锻炼学生发现问题、分析问题和解决问题的能力。通过课程学习,逐步实现学生知识、能力、素质的一体化发展,为造就无人作战领域高素质人才奠定坚实的基础。二是为学生参加科技创新竞赛做铺垫。创新工程实践课程的设置目的是培养学生的创新思维、提升学生的实践能力。结合无人系统深化课程改革,可以调动更多学生参与到无人系统的创新和实践活动中,依托课程基本完成项目,然后将创新成果加以完善,参加各类科技竞赛,进一步提高战斗力。
在此背景下,学生在无人装备的设计领域开展研究,战场搜救领域的无人搜救系统成为讨论热点。战场搜救是指对战场伤员或失踪人员进行的搜寻和救援行动,高风险性与高时效性并存。目前我军前线伤员的搬运方法主要有单人搬运法和担架搬运法,其中担架搬运法是最常用的搬运方法,需要两个正常兵力配合完成救护工作,存在浪费兵力和增加人员危险性的问题,而且一旦出现大规模群死群伤情况,救护问题就显得很棘手。为了提高作战前沿的伤员救治水平,减少伤死率,适应现代战争战伤无人化救护的新要求,一组学生团队提出了一种战场无人救助车的研制课题,该救助车在探测到伤员后,可以自动搬运伤员,减少人力、物力,提高战斗力。
根据文献查询结果可知,目前美国和欧洲多个国家的应急救援组织都对无人机搜救系统进行了研究,对伤员的一线救助主要采取的是无人机救助。据悉,以色列正在研制一种空中无人驾驶医疗系统,用于战场伤员的现场急救、后送和治疗[2]。美军有一种智能型担架,它是一种运送伤病员的新颖平台,相当于一间小型的重症加强护理病房(Intensive Care Unit,ICU),可置于野战救护车、直升机和固定翼飞机内作后送伤病员用[3]。目前国际上尚未有成熟的无人机战场救援应用案例,也没有建成拥有完整体系的无人机搜救系统,但国外的研究成果可提供有益的借鉴。
2 战场无人救助车的设计思路
该战场无人救助车的设计主要包括控制部分和机械结构部分,本文着重讨论机械结构的设计。机械结构设计按照以下步骤进行:首先,确定无人救助车的设计任务为在战场环境下实现对伤员的自动搬运和快速撤离,设计的结构要求符合人机工程学原理,在救助的过程中尽量减小对伤员的二次伤害;其次,利用功能分析法对总的设计任务进行功能分解,大体上可以分为车体移至合适位置、自动搬运伤员上车和运送伤员离开3项分功能;再次,利用调查分析法、设计目录法等科学的分析方法对各个分功能进行求解;最后,将分功能的解法组合起来,形成实现总功能的原理解法[4]。根据以上步骤确定了无人救助车的设计思路,该战场无人救助车主要采用履带式的行进方式,运行平稳,可以安全地运输伤员,在实施搬运过程中,首先根据指挥中心通报的坐标位置或者求救者发出的信号进行精确搜寻,待确定目标后移动至伤员附近,然后利用可动式车板和机械手结构的协调运动将伤员搬运上车,最后将伤员送到安全区域,整个工作流程设计见图1。为圆满完成设计任务,拟在研究过程中采用理论研究和模型制作相结合的方法。
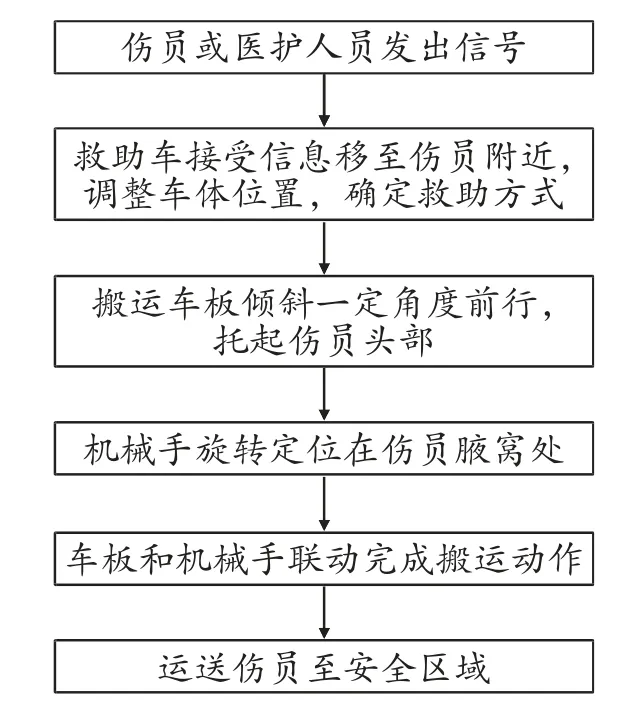
图1 战场无人救助车工作流程设计图
3 战场无人救助车的设计方案与实现原理
3.1 整体结构设计
该战场无人救助车属于无人作战范畴,可在战场环境下代替人力进入前线,自动对伤病员进行侦测并完成搬运救助任务。学生在提出设计任务后,积极查找资料,进行可行性分析,利用创新方法设计机构运动方案,并利用慧鱼创意组件搭建传动模型进行方案的验证和完善。慧鱼组件是一种工程积木,慧鱼构件的工业燕尾槽设计使它的6个面都可以和其他零件连接,实现任意的组合和扩充,从而展示机械设计的过程,增强学生对知识的综合应用及动手能力,利用慧鱼创意组件搭建的战场无人救助车整体结构模型见图2。救助车整个系统采用模块组合式结构,主要包括底盘传动模块、搬运车板模块、机械手模块和控制模块4个部分。救助车工作时,首先移至合适位置,然后搬运伤员,有意识的伤员可借助机构自行上车,对于伤情较重和失去意识的伤员,机构采用拟人式拖拉形式将其搬运上车,快速撤离至安全区域。

图2 战场无人救助车整体结构示意图
3.1.1 底盘传动模块
该战场无人救助车采用履带传动方式,可以缓冲、吸振,保证运送伤员时车体不产生剧烈抖动而对伤员造成二次伤害。从图2可以看出,履带传动模块位于车体两侧,共采用4个履带轮和2条履带,运行时,履带链的两个链节之间的孔依次与履带轮上的齿相啮合,从而保证传动的平稳进行。车体左右两侧的履带轮各用1个电机驱动,通过控制电机的运动实现整个车体的前移、后退、转向等动作,使救助车在执行任务时根据情况灵活运行。
3.1.2 搬运车板模块
搬运车板模块是救助工作中的核心模块,主要承担搬运伤员和承载伤员的任务,该模块的尺寸设计符合我国成年人人体尺寸的标准,能够保证搬运时伤员的安全舒适。整个模块采用了螺旋传动、链传动和摇块机构,利用慧鱼创意组件搭建的搬运车板正面结构模型见图3。

图3 搬运车板正面结构示意图
螺旋机构有两组,对称布置在车板两侧,靠链条和链轮组成的链传动实现同步运转,车板铰接于螺旋机构的下位螺母上,当螺杆在动力源作用下转动时,相对于车板对称分布的两个下位螺母带动车板前进和后退,前进和后退的距离根据伤员的位置和搬运进度而具体确定。摇块机构位于车板下方,作用是实现车板的倾斜,当确定伤员位置后,车体移动到合适位置,倾斜车板至救援的合适角度,其工作原理见图4。可以看出,机架与上位螺母固定连接在一起,当气缸内充气体时推动活塞杆移动,车板便绕着回转副中心B(车板与下位螺母的铰接点)倾斜一定角度[5]。在搬运过程中,螺旋机构和摇块机构按照时序要求动作,共同作用。
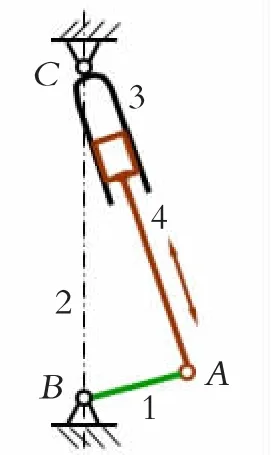
图4 摇块机构工作原理图
3.1.3 机械手模块
机械手模块的作用是配合搬运车板模块完成对伤员的搬运工作,主要包括机械手结构和位于车板两侧的平行四边形机构两部分。机械手结构连接在平行四边形机构的连杆上,见图5,可以实现两种运动:一是随着连杆一起运动;二是通过机械手舵机提供动力,使其相对连杆做往复摆动。
当救助车处于一般行走状态时,机械手结构升起,平行四边形机构处于压缩状态,连杆和机架重合在一起,见图2。当车体移动到合适位置后,通过控制内置机械手舵机,使机械手相对连杆摆动,夹持到伤员的腋窝处,调整摆角以实现最佳的夹持角度;两组平行四边形机构的曲柄刚性连接在一起,整个机构的自由度为1,因此,所有运动由一个舵机控制,通过刚性联动装置可实现两侧机构的同步运行。

图5 机械手模块示意图
当机械手夹持到伤员腋窝合适位置后,配合搬运车板模块的运动,平行四边形机构的曲柄向上转动,带动机械手按照一定的运动轨迹运动,和车板配合完成搬运伤员的功能,将伤员搬运到合适位置后,平行四边形机构处于伸展状态,可以充当护栏使用,避免在运输过程中发生伤员侧翻。平行四边形伸展状态见图6。
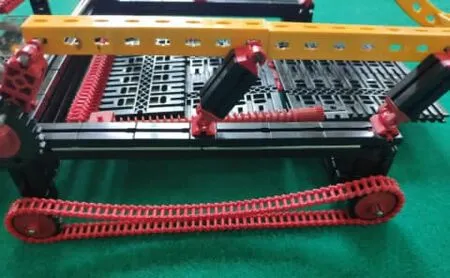
图6 平行四边形伸展状态示意图
3.2 实现原理
该战场无人救助车的机构设计采用了组合机构,整个技术方案可概括为:首先,探测到伤员位置后,车体在履带的驱动下移动到便于救助的位置;其次,采用螺旋机构实现车板的向前移动,采用摇块机构实现车板的倾斜,两者配合使车板前端抵住伤员的合适部位;最后,利用内置机械手舵机和平行四边形机构控制机械手的运动轨迹,使其实现拟人式手臂抱作用向上抬伤员,将重心置于搬运车板上,同时,机械手机构、平行四边形机构、螺旋机构等时序配合,实现快速安全的搬运救援。搬运动作归纳如下:车板倾斜拖住头部—机械手旋转抓住腋窝处—机械手和车板上拉下推共同动作—将伤员平稳搬运到车板上,从而完成救助搬运工作,搬运工作完成后,快速将伤员送至安全区域。
利用慧鱼创意组件搭建的机构模型已能完成基本动作,初步实现无人救助功能。
4 结束语
创新工程实践课程在组织教学内容时以产品创意设计实现的一般进程为主线,采用小组协同的形式开展教学,通过结合设计案例的讲授和课堂讨论环节的设计,让学生学会从关注现象入手,分析提炼现象背后的实质问题与需求,进而设计机构,解决问题。整个课程通过概念设计、方案设计、结构设计等创新实践过程和研讨答辩、实物模型制作、撰写技术文件等环节,激发学生的创造精神,锻炼提炼归纳能力,拓展思维空间,增强创新实践能力,为后续课程的学习奠定基础,为我军建设创新型军队提供强有力的人才和技术支撑。该战场无人救助车的机构设计工作主要是在创新工程实践课程中完成的,作品经过修改完善,配以控制模块,参加了陆军工程大学第三届“卓越杯”学生科技创新竞赛并获得了二等奖。事实证明,学生经过课堂学习、团队实践、竞赛升华等过程,切实提高了创新工程实践能力,达到了创新工程实践课程的目的。
