一种测量人体脉搏波的方法、装置及系统
2021-04-27王彩霞田杨萌张潇艺崔丽兰
刘 琳,王彩霞,田杨萌,张潇艺,崔丽兰
(北京信息科技大学 理学院,北京 100192)
0 引 言
近年来,随着医疗技术的快速发展,人们对医用的脉搏测量仪要求越来越高。脉搏是人体的动脉搏动,脉搏次数在一定程度上反映了人体的生理健康状况。人体脉率和脉搏波的测量是衡量人体是否健康和进行病理分析的重要数据。但是脉诊的定性化和主观性影响了脉象判断的科学性[1]。准确监控脉搏、心音、血压、心电等生理信号可以有效获得心血管系统的健康状况。同时,人们也试图根据脉搏波的变异性来评价和诊断人体心血管系统的病变[2]。
目前,脉搏测量主要有压电式、压阻式、光电式等方式[3]。其中,压电式和压阻式是通过压电片、电桥等微压力型材料将脉搏转化为信号输出;光电式则通过反射或对射方式,将血管中脉搏跳动过程中透光率的变化转换为信号输出,但光电式脉搏测量方法在测量时要求有较强的光强且光强可调,点光源光强随距离平方衰减,因此操作难度大。
随着对脉搏测量设备精度要求的不断提高,当前所使用的脉搏传感器在灵敏度、信噪比、功耗及成本等方面依然面临严峻的挑战。目前大量的研究工作聚焦于寻求功耗与灵敏度之间的平衡。现有技术已无法满足当前对脉搏测量设备的精度要求[4]。如何设计一种精确测量人体脉搏波的方法成为本领域技术人员研究的重点。
随着激光技术和IC的飞速发展,莫尔条纹技术发展迅速,被广泛应用于计量测试部门、航天航空领域、科研教育行业等。该项技术主要用于微小位移(长度、角度)测量、运动比较(两个相关运动部件的关系)以及莫尔偏析法等。使用光栅检测装置进行线性位移的测量,包括位于同一轴线上的发光装置、透镜、长光栅、指示光栅以及硅光电池[5]。莫尔条纹技术具有高分辨率和高精度等优点,可实现动态测量、自动测量及数字显示,抗干扰能力较强,测量速度较快。目前利用莫尔条纹技术的测量精度已超微米级,是位移测量领域各工业化国家具有强竞争性的关键技术。
本文利用莫尔条纹原理,通过平面连杆机构将脉搏跳动信号转换为方便测量的脉搏位移信号并将其传输到信号数字化处理装置,最终传输到预设的显示电路进行数字化显示。本设计方法利用莫尔条纹原理对微小的脉搏振动信号进行有效放大,并将脉搏波的机械振动信号转化为电信号,使脉搏测量具有极高的灵敏度和准确度。
1 莫尔条纹原理
莫尔条纹是光栅位移精密测量的基础[6]。光栅的刻线相交处形成亮带,而在一块光栅的刻线与另一块光栅的缝隙相交处形成暗带,与光栅刻线垂直的方向将出现明暗相间的条纹,这些条纹就是莫尔条纹[7]。形成莫尔条纹的原理如图1所示。若将两块光栅(指示光栅1、主光栅2)叠合,中间留有适当的微小间隙并使两块光栅刻线之间成微小θ度,则在a线上,两只光栅栅线彼此错开,光线从缝隙中透过形成亮带,其中透光部分由菱形图案形成;在b线上,两只光栅栅线相互交叠,相互遮挡缝隙,光线不能透过从而形成暗带。从技术角度上说,莫尔条纹是2条或者2个物体之间以恒定角度和频率发生干涉的视觉结果[8]

图1 莫尔条纹原理示意图
莫尔条纹特性有位移放大作用。当两光栅沿垂直于刻线方向相对移动时,莫尔条纹将沿刻线方向移动,光栅左右移动ω距(栅距),莫尔条纹上下移动间距B。相邻两条莫尔条纹间距B与ω距及两光栅θ角的关系为:
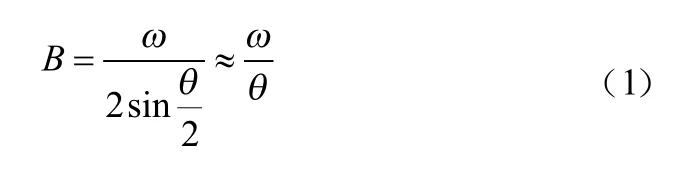
由公式B=ω/θ可知,间距B由ω距和2个光栅间的θ角决定。此时,当θ很小时,B远大于ω,将条纹间距与光栅间距之比称为莫尔条纹的放大倍数。令放大系数为k,则有:

只要对莫尔条纹的移动量和方向进行测定,就可确定主光栅的移动量及方向。一般情况下θ很小,所以放大系数k较大,如θ角为0.1°,k约为573。尽管光栅ω距很小,主光栅移动量很小,但通过莫尔条纹的放大作用亦清晰可辨。对于100线/mm的光栅,栅距为0.01 mm,当夹角为0.06°时,莫尔条纹间距B可达10 mm(放大了1 000倍)。
2 系统整体设计方案
2.1 设计方案
本文基于莫尔条纹原理设计的测量人体脉搏波的系统主要包括连杆装置、光栅检测装置、信号数字化处理装置、处理模块、脉搏信号传输装置、LED显示装置以及供电装置,如图2所示。

图2 测量人体脉搏波系统的设计方案示意图
信号采集单元。第一信号采集单元:平面连杆机构采集脉搏跳动信号并转变脉搏跳动信号的方向,使信号易于测量。第二信号采集单元:转变方向后的脉搏信号会触发光栅检测装置使其产生的莫尔条纹发生相应的位移变化,对其进行精密测量计算即可获得相应的脉搏位移信号。
信号数字化单元。利用放大电路对脉搏位移信号进行放大处理并滤波,然后传输到信号数字化处理装置,获得相应的脉搏跳动数字信号。数字化处理装置用于对脉搏位移信号进行转换处理后输出脉搏跳动数字信号。
信号处理及传输单元。该单元用于对脉搏跳动数字信号进行分析处理,并输出相应的目标脉搏数据,将目标脉搏数据传输到预设的显示电路。
信号显示单元。LED显示装置用于接收传输的目标脉搏数据并显示。
供电装置。供电装置为连杆装置、光栅检测装置、信号数字化处理装置、处理模块以及LED显示装置供电。
通过LED显示脉搏跳动频率、脉搏波形图、脉搏跳动正常指示数据或脉搏跳动异常指示数据等。
信号数字化处理装置和处理单元作为该系统的信号处理模块,在课题组现有的应用中已经有成熟的技术方法,这里不做详细解释。
2.2 平面连杆结构
平面四连杆结构由若干个刚性构件通过低副(转动副、移动副)联接,构件上各点运动平面均相互平行的机构称为平面低副机构,如图3所示[9]。低副具有压强小、磨损轻、易于加工和几何形状能保证本身封闭等优点。

图3 平面四连杆机构的结构示意图
脉搏跳动的方向垂直于皮肤表面,通过平面连杆机构可将脉搏的运动信号转化为平行于皮肤表面的运动信号。基于平面连杆机构采集目标对象产生的脉搏跳动信号转变方向后,可进一步通过与所述平面连杆机构连接的光栅检测装置采集运动信号。
本设计所用的平面四连杆机构中,可将L2贴近皮肤,L3连架杆连接长光栅,脉搏上下跳动带动长光栅左右移动,使其产生位移,后续可进行测量。


图4中,L5即为长光栅移动的距离。

图4 平面四连杆机构几何变化关系示意图
进行机构运动精度可靠性研究时必须考虑杆件在外力和惯性作用下的结构[10]。而且还需要考虑脉搏跳动循环的特征,可在平面四连杆机构两侧添加轻质且灵敏度高的弹性装置(比如弹簧),用于实现平面四连杆机构的自动复位。
2.3 光栅检测装置
利用光栅检测装置的放大作用可以将长光栅的微小移动量ΔL1转化为易测的莫尔条纹移动量ΔS。
光栅检测装置结构如图5所示。短光栅(指示光栅)固定不动,长光栅(主光栅)与移动物体固紧,即与图3中L3杆的中部相连,并与平面连杆机构共面,两计量光栅有几微米到几十微米的间隔。光栅检测装置的长光栅和短光栅(示光栅)作用会产生明暗相间的莫尔条纹。脉搏振动带动长光栅移动,光栅检测装置产生的莫尔条纹会发生相应的位移变化ΔS。从光源发出的光经准直镜后,以平行光照射光栅,光束经过某组莫尔条纹后由硅光电池接收,并将光信号转换为电信号。长光栅移动ΔL1,莫尔条纹周期性变化,依靠光电方法可获取相应的莫尔条纹位移ΔS,硅光电池接收这一光信号的变化信息。

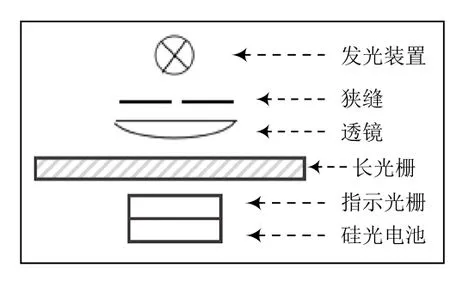
图5 光栅检测装置的结构示意图
在具体实施过程中,利用硅光电池进行光电读数通常不是针对某一点莫尔条纹进行的,而是一定长度内对若干个相同的点进行检测,这在很大程度上消除了局部以及周期误差的影响,使检测精度优于计算光栅本身的刻线精度。
根据几何关系可得脉搏跳动位移量ΔL:

将公式(4)代入上式可得:

只需知道两光栅夹角θ、平面连杆装置中连架杆L3的长度b,测出莫尔条纹的移动量ΔS,即可得到脉搏跳动的位移量 ΔL。
3 测量人体脉搏波装置及实物结构
整体装置和实物结构如图6所示。平面四连杆机构位于整体的左侧,光栅检测装置位于整体的右侧,各组成部分位于同一轴线。从空间的角度看,平面四连杆结构在XOZ平面,垂直于桌面(XOY面),本装置其他部分均在XOY面放置。光栅检测装置中的长光栅与平面四连杆机构的连架杆相连接,如图6所示。图4中的连架杆L5连接光栅检测装置的长光栅(长光栅与平面连杆结构共面),脉搏的上下跳动可以带动光栅检测装置中的长光栅左右移动,使长光栅产生位移,使莫尔条纹移动,通过测量莫尔条纹的移动量即可得到脉搏跳动位移量,最后对脉搏和脉搏波进行输出、显示。

图6 测量人体脉搏波的振动传感器装置结构示意图
需要说明的是,在实施过程中需将位移信号通过放大电路进行放大处理,但放大过程会产生其他信号的干扰,因此须对放大处理的信号进行滤波,去除呼吸颤抖等干扰信号。在利用预设的放大电路对所述脉搏位移信号进行放大处理后,须利用预设的滤波器对放大处理后的脉搏位移信号进行滤波处理。选用的简单整系数带阻滤波器滤波效果较好,能够减少计算量,利于数据的实时处理(滤波器是FIR结构,具有严格的线性相位特性,只需较少的计算,且系数均为2的整次幂,因此可用简单的移位运算代替乘法,用递归计算实现非递归的FIR滤波,进一步减少计算量)。数据传输到控制模块后进行处理,得出数字信号,由显示电路显示。
本设计利用莫尔条纹原理进行接触式人体脉率和脉搏波的测量,对微小的脉搏振动信号进行放大,实现信号采集,并将脉搏波的机械振动信号转化为电信号,提高脉搏测量的灵敏度和准确度。通过显示电路对人体脉搏进行实时监测,并以有线连接或无线连接方式远程监控人体的实时脉率以及脉搏波形图。
4 结 语
莫尔条纹技术已被应用在诸多领域,为测量人体脉搏提供了新的方法。采用此技术测量人体脉搏波的振动传感器测量准确度较高,达微米级以上。
人体脉搏的跳动以及波形图可以反映出一个人基本的健康状况,所以准确测量人体的脉搏对于人类健康发展具有十分重要的意义。此测量装置具有广阔的应用前景。
