基于三维激光扫描技术在滑坡变形监测中的应用
2021-04-27孔文琼张瑜都赵瑞英
孔文琼 张瑜都 赵瑞英
摘 要:以兰州某滑坡体为例,运用中海达HS1200三维激光扫描仪进行滑坡体数据采集、处理,与同期全站仪测得数据进行比较,并进行点位误差分析,建立了数字高程模型(DEM),生成等高线,利用相应软件HD 3L SENE计算滑坡体的体积。结果表明,两种方法变形量基本相同,三维激光扫描技术效率高,无需接触被测物体,点位误差为9.92mm,体积误差为0.45%,满足监测精度要求,对滑坡体采用三维激光扫描技术进行变形监测具有可行性。
关键词:三维激光扫描;滑坡变形监测;点云数据;对比分析
中图分类号:P642.22 文献标识码:A 文章编号:1001-5922(2021)07-0097-04
Application of 3D Laser Scanning Technology in Landslide Deformation Monitoring
Kong Wenqiong1, Zhang Yudou1, Zhao Riuying2
(1.Shaanxi Railway Institute, Weinan 714000, China; 2. China Railway Lanzhou Bureau Co., Ltd.,
Lanzhou 730000, China)
Abstract:This paper takes a landslide in Lanzhou as an example, Using the Haida HS1200 3D laser scanner to collect and process landslide data, coMPares with the data measured by the total station in the same period, and analyzes the point error. Establishes a digital elevation model (DEM), and generate contour lines. Calculate the volume of the landslide body with the corresponding software HD 3L SENE. The results prove that the deformation of the two methods is basically the same, the 3D laser scanning technology is highly efficient and does not need to touch the object to be measured. The point error is 9.92mm and the volume error is 0.45%. It can meet the monitoring accuracy requirements, and it is feasible to use 3D laser scanning technology for deformation monitoring of landslide body.
Key words:3D laser scanning; landslide deformation monitoring; point cloud data; coMParative analysis
中国是一个多山、地质灾害多发的国家,滑坡预报的技术手段之一是滑坡监测,传统的测量方法是利用全站仪、GPS等测量仪器进行观测,都属于单点监测,存在监测点较少、造价高、自动化程度低等问题[1]。三维激光扫描技术是近年出现的高新技术,又被称为“实景复制技术”[2],具有效率高、精度高、非接触性等优势[3],它可以获得滑坡体的三维坐标点云数据,从而能够详细的得到滑坡体细节和整体的变形信息。
1 三維激光扫描技术原理
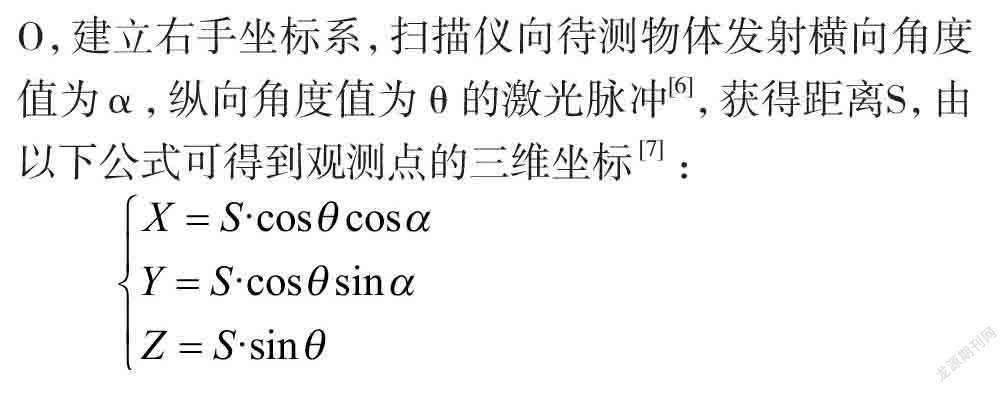
三维激光扫描是一种高速激光测距的测量技术[4],探测方法有多种,工程应用中一般都采用脉冲法进行测量,其原理是根据激光测距[5],以测站点为坐标原点O,建立右手坐标系,扫描仪向待测物体发射横向角度值为α,纵向角度值为θ的激光脉冲[6],获得距离S,由以下公式可得到观测点的三维坐标 [7]:
2 滑坡变形监测实例分析
变形监测分析是滑坡变形监测的重点工作,其中主要包括以下两方面的内容:通过监测滑坡体特征点的不同时段的形变量,分析其变形的情况;根据点云数据生成DEM模型和TIN数据分析不同时刻相同区域的体积、等高线等变化的情况。
2.1 滑坡区域概况
该滑坡体位于兰州市某盆地的东面,滑坡表面植被较少,且坡度较陡,该试验区域主要是黄色粉质黏土,容易发生滑坡。因为旁边工程的修建,该滑坡体坡脚遭到严重的破坏,增加了该区域发生滑坡的可能性。利用三维激光扫描仪定期对该区域进行滑坡监测,能够及时掌握该滑坡的信息,预防滑坡灾害的发生[8]。
2.2 点云数据采集
本试验使用中海达HS1200三维激光扫描仪对滑坡体表面进行扫描,为了对监测数据在统一的坐标系下进行对比分析,在滑坡体周围埋设5个控制点用于观测定向及设站,控制点选取在通视良好、稳定且离滑坡体150~200m的公路两侧,滑坡体观测采用自由设站的方法,每次观测2个测站,具体监测网如图1所示。
2.3 点云数据处理
采用中海达HS1200地面型三维激光扫描仪对滑坡体进行监测,得到5期扫描的点云数据,将现场扫描的数据导入配套的软件HD 3LS SCENE中,应用该软件对点云数据进行点云拼接、去噪处理、数字高程模型的建立等[9]。
(1)点云拼接。根据滑坡体的实际情况,一个测站很难采集到所有的点云数据,在外业数据采集时要从不同位置、不同角度进行扫描,再将不同测站的点云数据拼接到一起[10]。在观测过程中,由于采用独立的坐标系,最终要将采集的数据运用理论知识统一到同一个坐标系中。本试验采用HD 3LS SCENE软件,基于控制点的拼接,控制点选取3个以上、分布均匀且不在同一直线上的同名点。根据分析得到拼接时总体拼接精度为9.73mm,结果如图2所示。
(2)点云去噪。在进行数据扫描的过程中,原始数据中会包含大量无用的冗余数据,这些数据会对后续的数据拼接、建模以及分析产生影响,降低数据处理的质量[11],因此,在建模之前要进行剔除噪点处理,提高信息的准确性。本文先通过人工手动剔除一些明显的异常点,对于噪点难区分的云点时,需采用相应的软件进行去噪处理,去噪后的点云如图3所示。
(3)模型建立。根据滑坡体的实际形状和获得的点云数据建立数字模型。本文采用HD 3LS SCENE软件选择目标点云,进行投影、生成DEM、TIN模型,然后将DEM 模型导入到ArcGIS中加工处理,然后进行可视化分析。数字高程模型如图4所示。
2.4 滑坡分析
(1)基于特征点的变形分析。本次试验为了更好的反映滑坡体的变形情况,在使用三维激光扫描仪HS1200的同时,使用全站仪进行观测。在观测过程中,选取滑坡区域状态稳定且较为突出的有明显特征的岩石块作为监测点进行监测扫描,建立模型,提取这些特征点的坐标值进行分析比较。本试验分别于4月~8月进行5次观测,得到5期点云数据和全站仪观测数据,在扫描得到点云数据中选取7个特征点的点云数据为变形分析的数据。表1~2为处理后其中两期的坐标值和变形量。
根据监测方案得到5期滑坡体位移累积量,如表3所示。
表1和表2分别为4月和8月采用全站仪和三维激光扫描仪测得的滑坡体变形的基本情况,两种方法得到的变形量基本上一致。
由表3可以看出,特征点JC4、JC6在Z方向累计沉降量超过 40 mm,那么在今后的滑坡监测过程中,要重点对这两个监测点及周围做好加固措施。通过上面数据分析得到三维激光扫描仪可以应用到滑坡变形中,而且还可以反映滑坡体的变形情况。
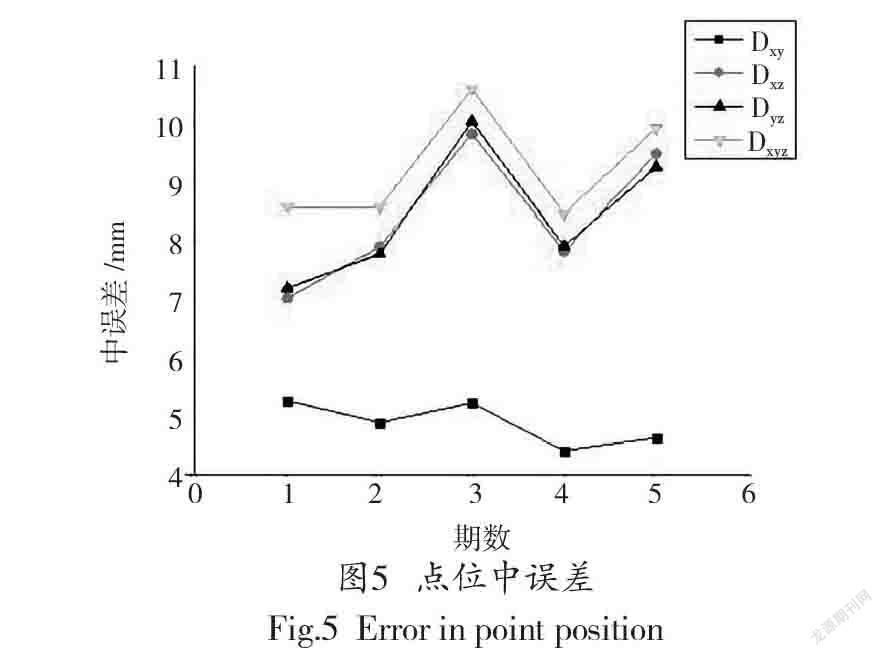
通过对比以上两种测量方法的数据,由点位中误差计算公式得到的误差结果如5图所示。
由图5可知,监测点误差MX=3.59mm,MY=2.92mm,观测点前五期点位中误差DXTZ=9.92mm,符合精度要求,可看出三维激光扫描仪能够满足滑坡体的监测精度要求。在进行三维激光扫描过程中,滑坡体上的激光光斑会随着扫描距离的增加而变大,误差也会随着距离的增加而增大,从而导致了扫描精度的降低;同时,由于特征点的选取会受到地面环境的影响,点云数据在进行处理时会降低测量精度。
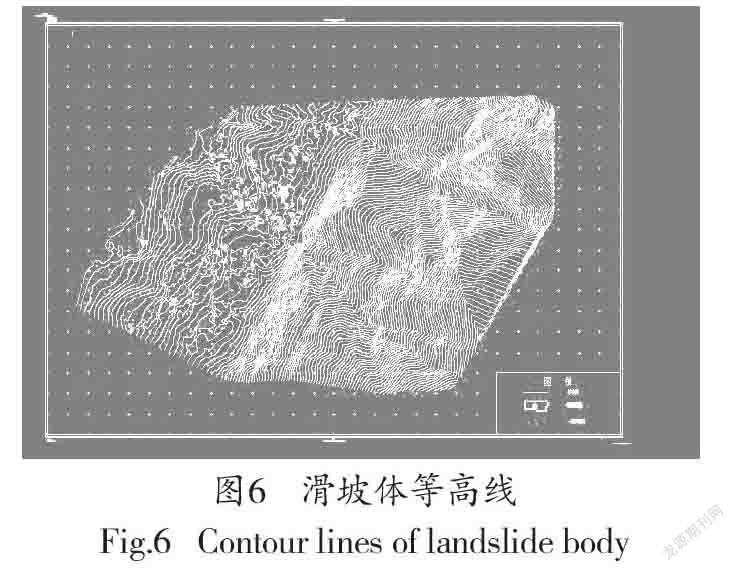
(2)基于特征线的变形分析。通过扫描得到点云数据,可以构建DEM、TIN模型,从而可以提取滑坡体的等高线、裂缝线等线性特征,根据这些线性特征,分析对应滑坡体在不同时期的变化。
使用中海达的点云后处理软件,将三维激光扫描仪获得的点云数据的坐标信息自定义等高距,生成等高线。通过不同时期所生成的等高线的对比,就可以得到滑坡体的变化趋势,如图6所示。由第1期和第3期生成等高线对比分析,得到两期的变形量约为10cm。
(3)基于土方量的变形分析。对比滑坡体两期点云数据建立的模型的土方量来分析滑坡体的变形信息,在中海達HD 3L SENE软件中计算本试验滑坡体的体积。由处理好的点云数据,生成DEM和TIN数据,再计算滑坡体的体积。根据实际情况,该滑坡体以数据最低点设置试验基准面,输出最终滑坡体体积成果数据,2D面为28602.000m2,3D体积为1629831.467m3,与全站仪测量对比,结果如表4所示。
对比分析得到,与全站仪相比,三维激光扫描仪采集的点数量较多,且用时较少,由最终得到的结果来看,以全站仪为参照物,三维激光扫描体积误差为0.45%,满足一般要求。
3 结论
三维激光扫描技术配合相应的软件,相对于传统方法能够更形象直观的反映研究物体的特征。文章基于三维激光扫描与全站仪从特征点、特征线和土方量进行标胶分析,得到滑坡体实际的变形情况,最终得到了该滑坡体法人变化的趋势。结果表明,三维激光扫描技术在滑坡变形监测应用中有参考意义。
参考文献
[1]徐进军,王海城,罗喻真,等.基于三维激光扫描的滑坡变形监测与数据处理[J].岩土力学,2010,31(07):2188-2191+2196.
[2]马勇,梅泽.基于三维激光扫描仪测距精度分析[J].矿山测量,2018,49(1):71-74+104.
[3]焦晓双,胡海峰,廉旭刚,等.基于三维激光扫描技术的矿区建筑物变形监测方法[J].金属矿山,2018(04):150-153.
[4]郑德华,沈云中,刘春.三维激光扫描仪及其测量误差影响因素分析[J].测绘工程,2005,14(02):32-34+56.
[5]胡嫚,谢谟文,许波.一种基于三维激光扫描的滑坡变形固定桩点监测方法[J].西南大学学报(自然科学版),2017,39(10):155-163.
[6]刘春,陈华云,吴杭彬.激光扫描遥感的数据处理与特征提取[M].北京:科学出版社,2009.
[7]赵瑞英.三维激光扫描技术在滑坡检测中的应用研究[D].甘肃:兰州交通大学,2016.
[8]卢其垡.三维激光扫描技术在古建筑测绘中的应用[J].北京测绘,2020,34(05):623-627.
[9]张国龙,王同合,纪思源.三维激光扫描测量技术在滑坡整体监测中的应用[J].工程勘察,2017,45(07):54-58.
[10]马勇,韩超斌,石林峰.基于不同拼接方式的三维点云拼接精度对比[J].矿山测量,2018,46(2):100-103.
[11]裴东东,官云兰,张勇峰,等.基于车载三维激光扫描系统的滑坡变形检测方法[J].中国地质灾害与防治学报,2016,27(1):71-76.
