火星环绕器环火轨道的角动量管理方法
2021-04-25信思博郑艺裕赵训友
信思博,顾 强,郑艺裕,赵训友
上海卫星工程研究所,上海 200240
0 引 言
深空探测器受运载发射能力限制,携带的燃料有限,在任务末期往往所剩无几,为延长工作寿命应节约使用.例如卡西尼、伽利略等探测器均因燃料耗尽,防止污染地外天体被迫结束任务[1].
中国首颗火星探测器包括环绕器和着陆器两部分,环绕器在完成制动捕获、两器分离后,进入任务末期的中继通信和科学探测任务阶段,此时环绕器运行在偏心率约0.6的椭圆轨道上.由于火星上磁场极其微弱,磁力矩干扰可以忽略不计[2];大气较地球稀薄很多,气动阻力微乎其微;此时重力梯度力矩和太阳光压力矩是主要的空间干扰力矩,除必要的轨道维持外,燃料消耗主要用于卸载二者引起的角动量累积[3-4].
不同于常规地球低轨卫星磁卸载是主要的角动量管理方式,火星的磁场微弱,探测器只能采用喷气卸载,因此在满足任务需求的前提下尽可能减少喷气次数,可以大大延长探测器工作寿命.戴居峰等[5]提出了利用卫星两翼帆板不同角度偏置,产生绕对日轴的涡轮力矩实现角动量平衡管理,并在嫦娥二号上进行了相关测试,辨识出了帆板反射系数等参数,但该方法牺牲了探测器业务工作能力,仅能维持安全状态.赵晓峰等[6]通过主动控制姿态机动改变卫星迎风面面积,利用气动阻力进行被动式轨控,实现卫星编队伴飞运动的长期稳定.该方案仅适用在500 km以下高度飞行的地球卫星,其他轨道环境运行的卫星因大气稀薄而无法适用.薛锐等[7]在嫦娥五号飞行试验器的试验任务中,采用了在+z对月姿态下进行俯仰偏置,根据惯量参数将作用在探测器y轴上的重力梯度力矩配平至零,其余2个轴角动量每圈平衡.该方案适用于运行在圆轨道、始终保持轨道系姿态的卫星,重力梯度力矩保持恒定,对于椭圆轨道和经常姿态机动的卫星无法适用.
考虑到火星探测任务在着陆器分离后,环绕器除少数时间机动对火用于和着陆器通信,大部分时间保持对日定向用于对地数传通信,姿态仅需满足天线电轴波束覆盖地球即可,本文提出绕对日轴姿态偏置,以调节光压力矩的作用方向,实现光压力矩和重力梯度力矩相互抵消,减少空间力矩累积量.再在对火姿态下绕中继天线电轴方向姿态偏置,进一步减少重力梯度力矩的影响.通过仿真表明,该方法有效地减少了空间环境力矩的引起的角动量累积,进而减少喷气卸载次数,节约燃料消耗,延长环绕器寿命.
1 火星环境力矩建模
由于环绕器运行在近火点高度265 km的椭圆轨道上,远高于125 km的火星大气厚度(约等效于地球卫星1000 km处的大气密度),因此气动力矩可以忽略.火星的空间干扰力矩只需要考虑重力梯度力矩和光压力矩.
1.1 重力梯度力矩
环绕器处于火星中心引力场,所受重力梯度力矩和环绕器惯量特性以及距火星中心距离相关.环绕器本体对其质心的重力梯度力矩的一般表达式为

(1)
式中,μ为中心天体的引力常数,E=-r/r为环绕器指向天体质心的单位矢量,I为环绕器的惯量阵,且重力梯度力矩和惯量阵定义在同一星体坐标系中.对运行在近地近圆轨道上的对地观测卫星而言,大部分时间保持+z对地姿态,重力梯度力矩在y轴上累积,其余2个轴上的力矩在1圈内平衡,无累积.而火星环绕器的环火轨道为大偏心率椭圆,且因任务排布,每个火星日需要在+z对火姿态和-z对日姿态之间来回姿态机动,分别完成对着陆器的中继通信和对地通信任务,因此重力梯度力矩的干扰不仅和轨道高度有关,还和当前惯性姿态相关,引起的角动量累积远比地球卫星复杂.

(2)
式(2)为重力梯度力矩角动量累积表达式,Cbi为当前卫星惯性姿态.考虑到火星环绕器重力梯度力矩的复杂性,相应的角动量管理应结合任务作业规划实现多圈平衡,减少喷气卸载.
1.2 光压力矩
通常作用在航天器上的光压和航天器受照面积、受照角度、表面材质反射率以及太阳光强相关,当太阳照射在面积为S的物体上时,其压力的一般估计式为
F=-p(1+ν)Scos2σn+p(1-ν)Ssinσcosσt
(3)
其中,n、t为受射面积的法线和切线单位矢量,ν为表面反射系数,σ为阳光入射角[8].相应的光压力矩由各个部件的光压力矩合成得到,即
Ts=∑(r-r0)×F
(4)
由于航天器受照面积很难准确量化,表面反射系数和材质特性以及材质的退化情况相关,需要大量在轨数据反演,且各个航天器有各自的结构材料特性,难以做到准确统一.为了便于分析,通常将航天器的光压模型简化为一个长方形箱体和一对太阳帆板(Box-Wing模型),以保留影响光压的主要部分[9].
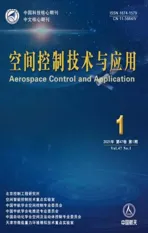
火星环绕器主要构型如图1所示,主体部分为六棱柱构型,两翼帆板对称安装在y轴上,可绕y轴转动以跟踪对日.此外在-z轴方向伸出高增益对地天线,可以二维驱动,实时保证对地指向,转动轴与本体系x轴和y轴平行.
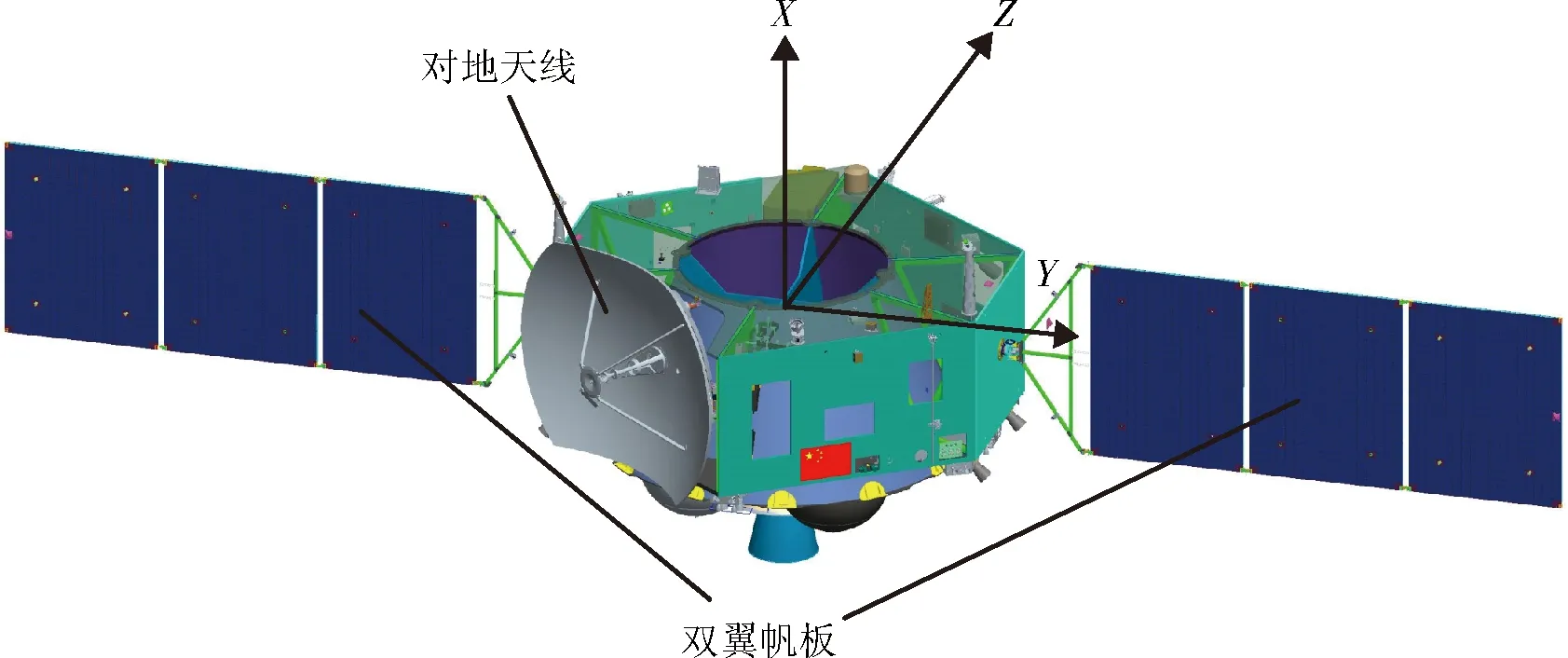
图1 火星环绕器构型示意图Fig.1 Configuration of Mars rover
按照Box-Wing模型分析方法,将火星环绕器简化为“中心箱体+双翼帆板+高增益天线”的构型,六边形星体按照投影面积进行等效.
光压是一种面力,与航天器形状密切相关.计算出光压后,与相对质心的力臂叉乘即得光压力矩.通常为简化计算,将各部件的光压作用点视为部件的几何中心,同时根据航天器本体上的光照角度确定受照象限.表1给出了各主要表面部件的建模参数[11].
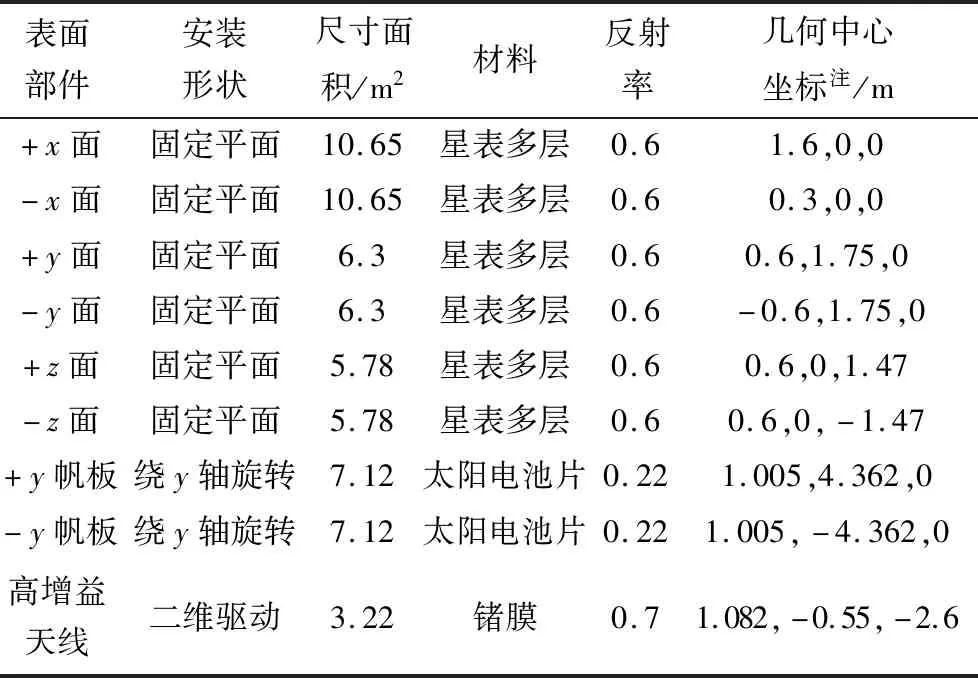
表1 火星环绕器表面部件建模参数Tab.1 Model parameter of Mars rover surface
2 任务需求和姿态机动优化
根据火星探测任务规划,环绕器在和着陆器分离后,变轨进入中继通信轨道,在此期间完成对着陆器的中继通信和对地数传任务.中继通信轨道周期为7.8 h,1个火星日飞行3圈,根据业务作业表规划,1个火星日完成1次近火中继通信和1次远火中继通信,通信时间分别为20 min和1 h,在中继通信时段环绕器保持+z轴对火的轨道系姿态,同时绕+x轴偏置35°,以保证中继天线指向着陆点.对火姿态如图2所示.

图2 +z对火姿态示意图Fig.2 +z axis towards Mars
其他时间段环绕器保持在-z轴对日模式,+y轴垂直火星公转轨道面,同时高增益天线通过二维驱动始终指向地球,以进行能源补充和对地数传业务.姿态如图3所示.
图3 -z对日姿态示意图Fig.3 -z axis towards Sun
按照任务规划,排布1个火星日的环绕器作业表,相关仿真参数如表2所示.
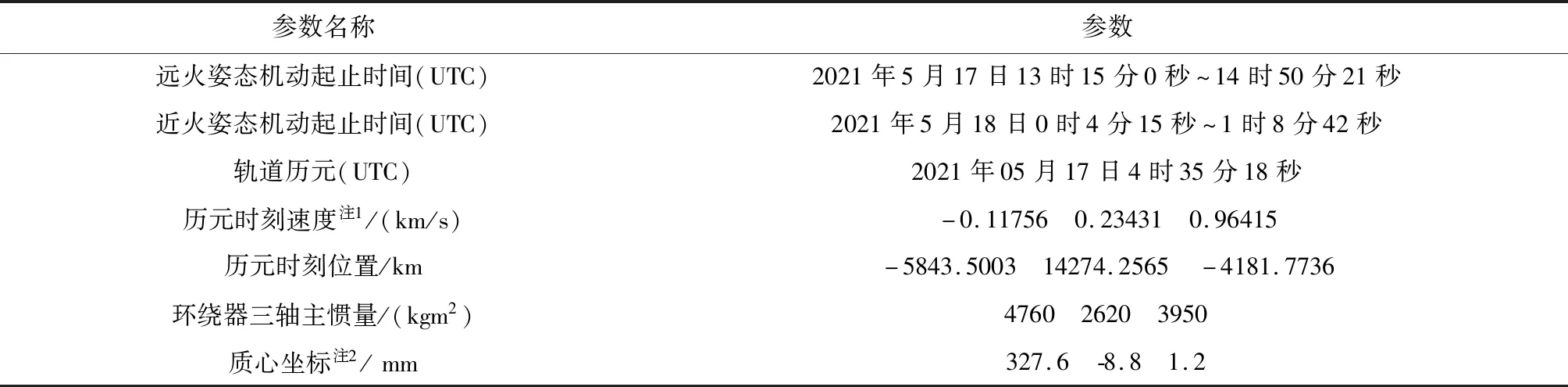
表2 空间力矩仿真参数设置Tab.2 Emulation parameter of space moment
2.1 原姿态机动方式
按照1个火星日的标称环绕器作业表,分析重力梯度力矩的光压力矩特性,1个火星日内空间力矩和角动量积累情况如图4~5所示.
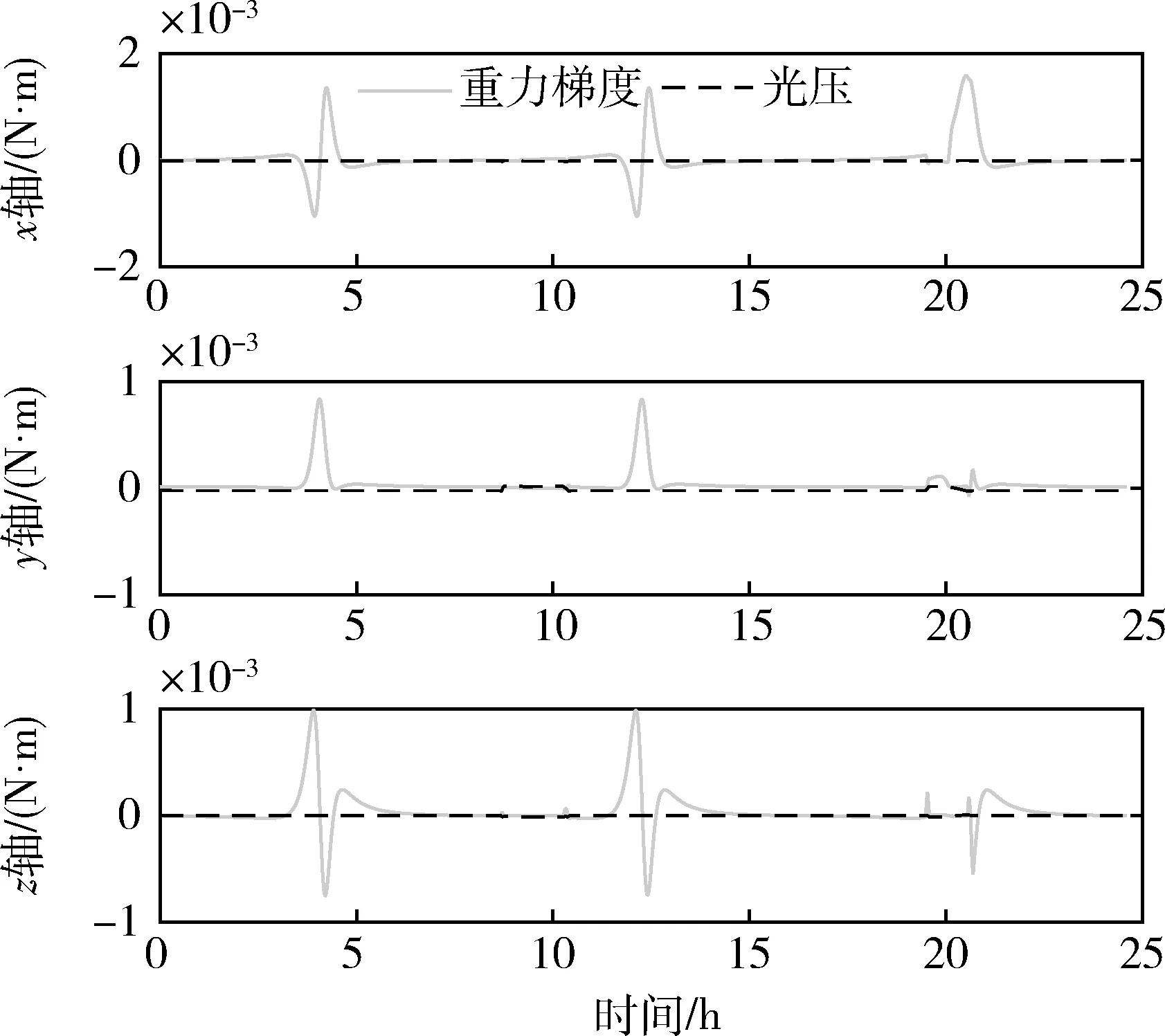
图4 空间力矩(本体系下投影)Fig.4 Space moment of base coordinate
按照标称作业规划,1个火星日后重力梯度力矩和光压力矩累积量分别达到3.04 N·m·s、1.98 N·m·s,二者三轴合成后角动量为2.77 N·m·s,该值即每天累积量.从图5看出重力梯度力矩主要作用在近火弧段,前2圈近火点无对火姿态机动作业,和第三圈的累积特性有所差别.由于环绕器大部分时间保持对日姿态,惯性姿态角几乎无变化,光压力矩表现为常值累积.
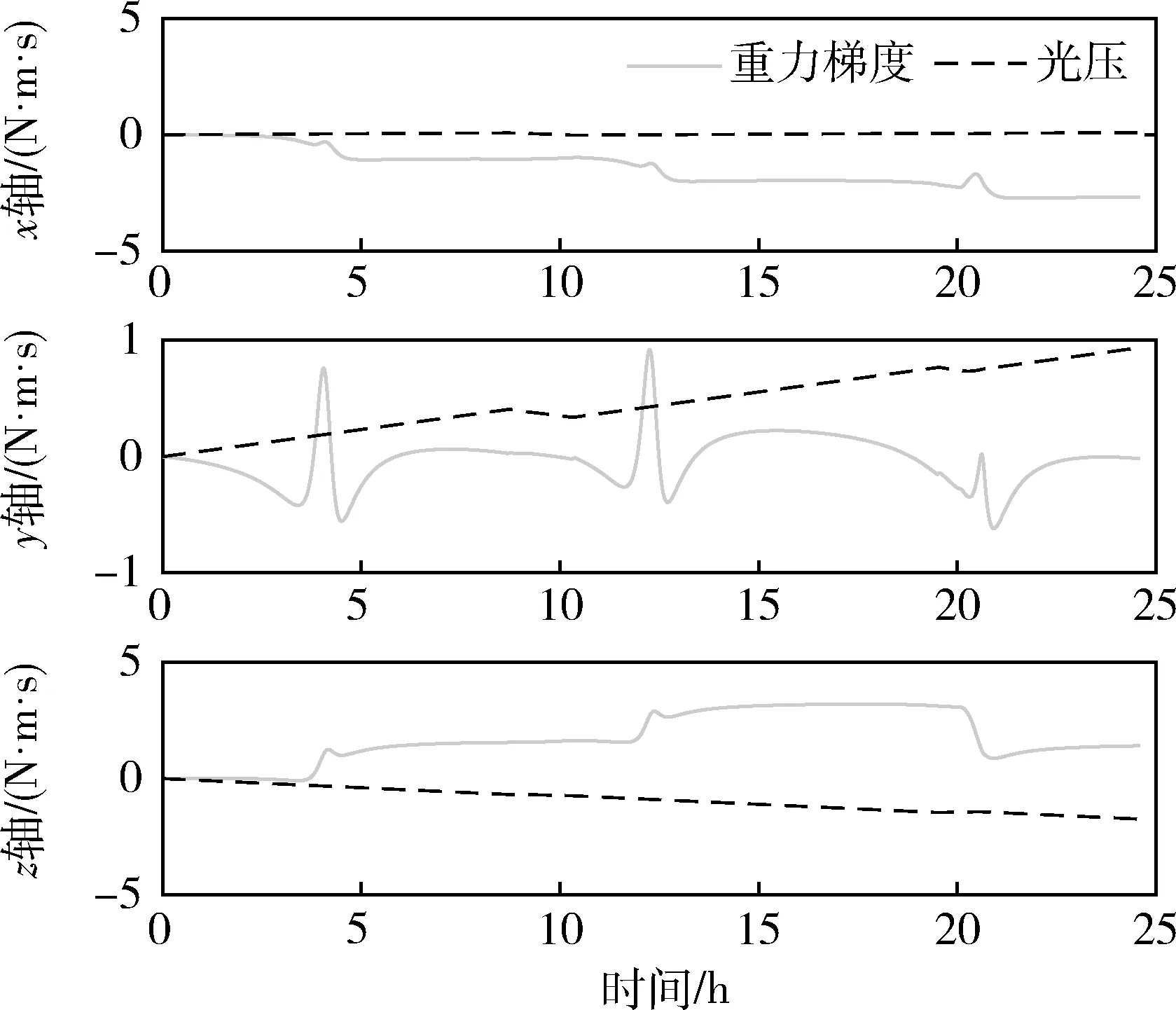
图5 空间力矩累积量(惯性系下投影)Fig.5 Intergration of space moment on Inertial coordinate
2.2 对日姿态偏置
环绕器在对日姿态下进行对地数传和帆板充电作业,此时天线实时跟踪地球,在小角度范围内转动,绕对日轴旋转不影响这2个任务.
利用偏置对日轴角度的方法,改变光压力矩累积方向,实现与重力梯度的平衡.需要说明的是,由于环绕器前2轨的近火点不执行对火机动作业,仍旧保持对日姿态,对日姿态偏置也在一定程度上改变了重力梯度力矩的累积量.通过偏置角度遍历寻优,找到一个火星日内所有空间力矩累积量之和最小的数值.
由表3看出,在对日偏置7度时,空间力矩总累积量最小,为1.082 Nms,不到原先状态的一半.
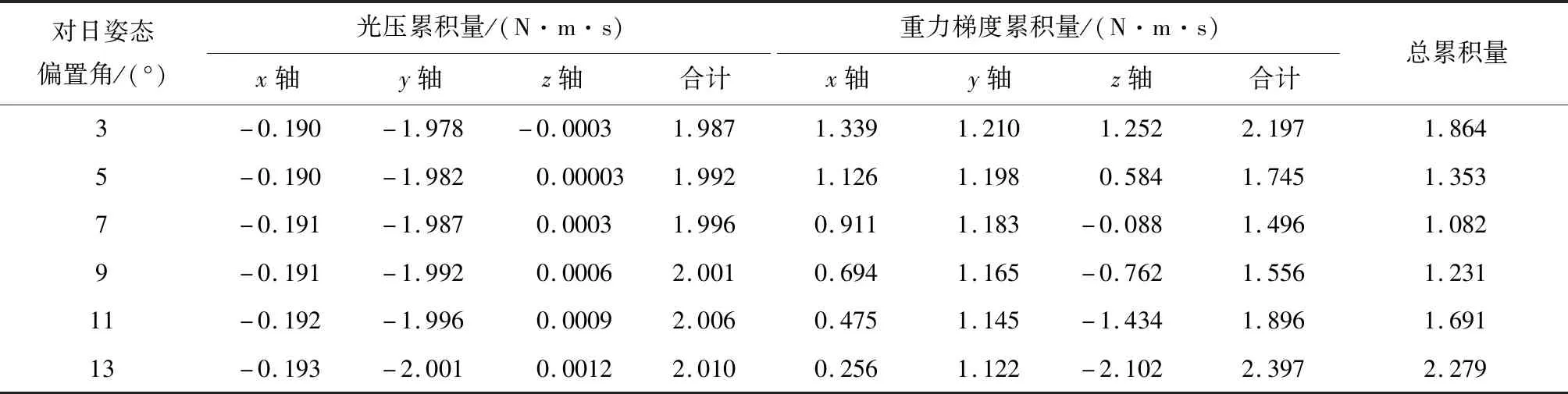
表3 对日姿态偏置时空间力矩累积量Tab.3 Intergration of Space moment on offset attitude towards Sun
图6~7为对日偏置7°时重力梯度和光压力矩在1个火星日的变化情况,以及相应角动量的累积.和原状态相比,重力梯度力矩累积量有所减小,同时光压力矩的累积方向发生改变,抵消了一部分重力梯度力矩产生的角动量.
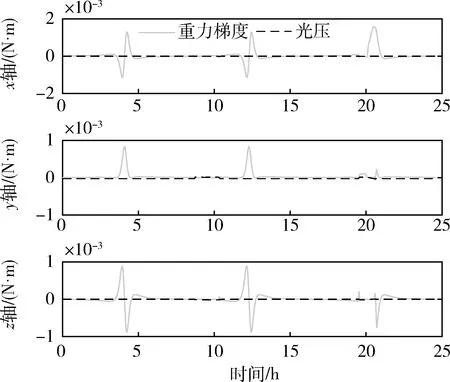
图6 对日偏置时空间力矩(本体系下投影)Fig.6 Space moment on offset attitude towards Sun(Base coordinate)
2.3 对火姿态偏置
根据式(1)可知,重力梯度力矩和航天器质量特性密切相关,在惯量积远小于主惯量的条件下,三轴惯量差和力矩大小呈正比[13].因此通过姿态偏置改变对火轴与其他两轴的大小比例,实现减小重力梯度力矩累积量.
由于环绕器用于和着陆器通信的中继天线安装在+z面偏+y方向,环绕器对火通信姿态为+z轴对火且绕+x轴旋转35°,姿态绕天线电轴方向旋转不影响两器通信作业.同时每天对火通信时间不足1.5 h,仅占全天工作时间的6%,其余时段保持对日数传状态,对火姿态的改变对光压的影响微乎其微.
在上节所述的对日姿态偏转7°的基础上,在对火机动作业时,火星环绕器绕对火轴偏置不同角度,寻找空间力矩累积量最小的角度.
从表4看出,对火偏置-15°时,空间力矩总累积量最小,其中光压力矩累积量几乎没有变化,重力梯度力矩累积量从1.496 N·m·s减少到1.206 N·m·s,总累积量从1.082 N·m·s减少到0.902 N·m·s.在这种情况下1个火星日内空间力矩和角动量积累情况如图8~9所示.
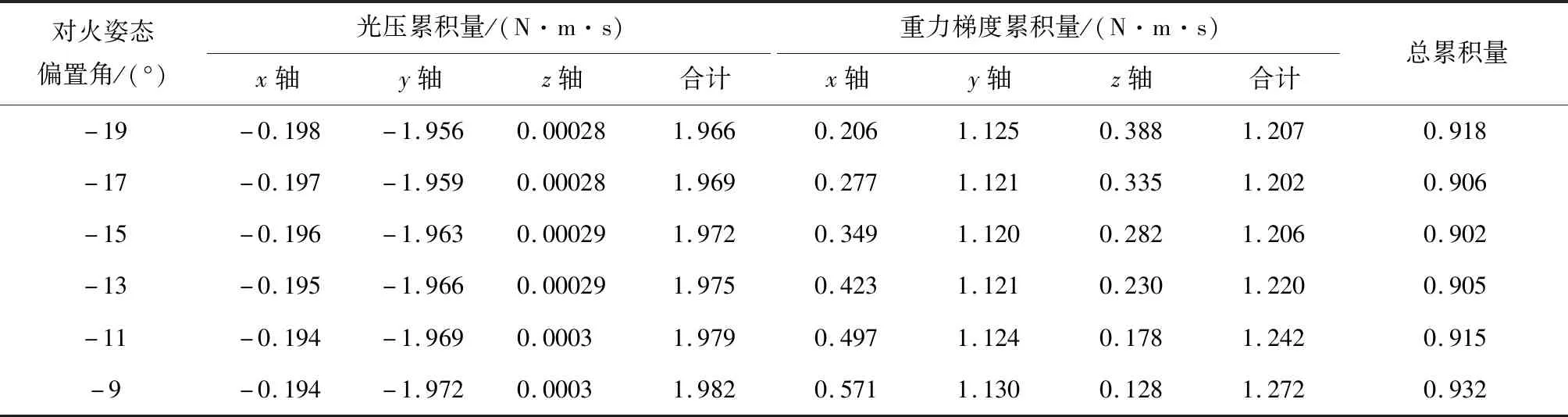
表4 对火姿态偏置时空间力矩累积量注Tab.4 Intergration of Space moment on offset attitude towards Mars
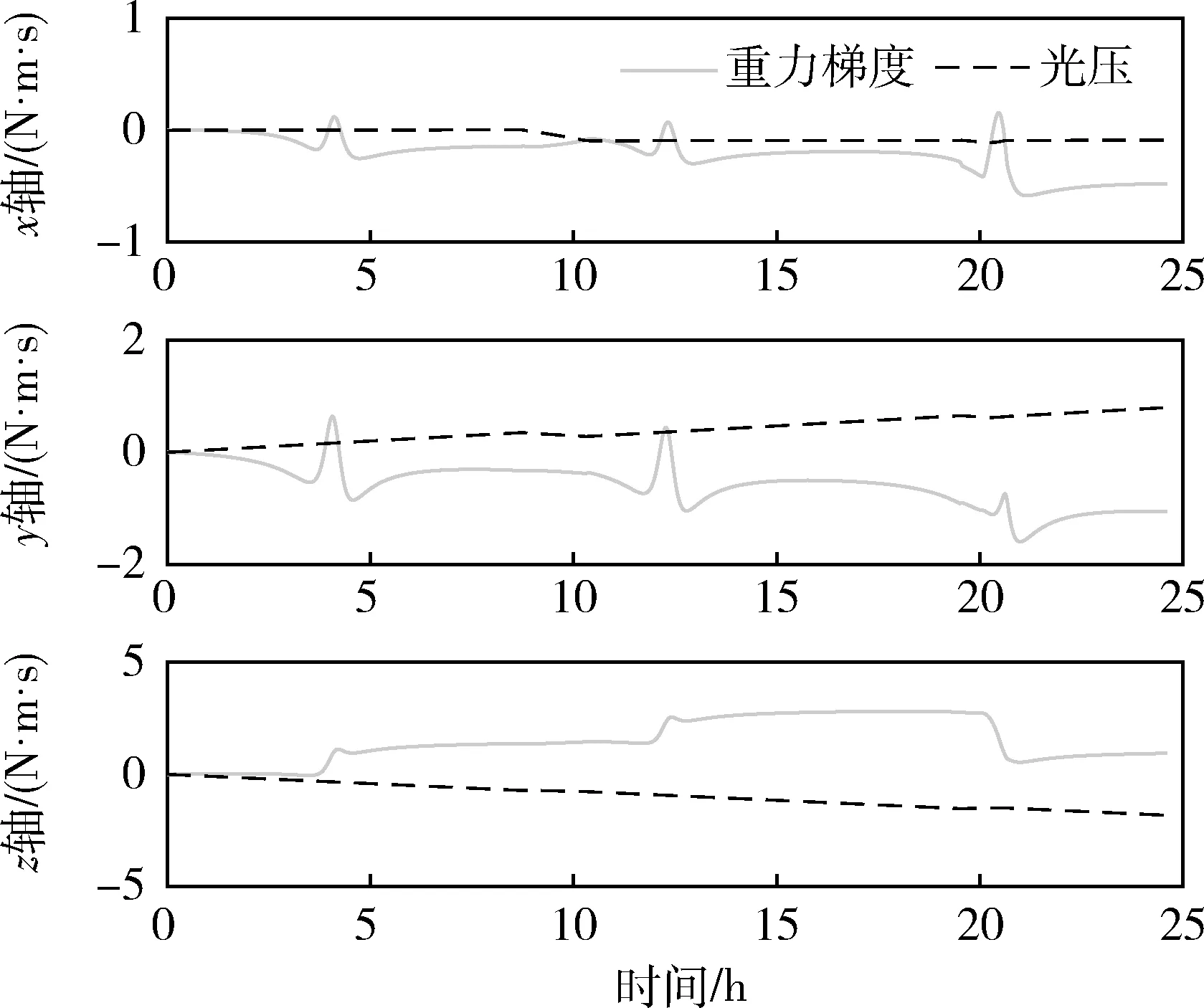
图7 对日偏置时空间力矩累积量(惯性系下投影)Fig.7 Intergration of space moment on offset attitude towards Sun (Inertial coordinate)

图8 对日对火偏置时空间力矩(本体系下投影)Fig.8 Space moment on offset attitude towards Mars(Base coordinate)
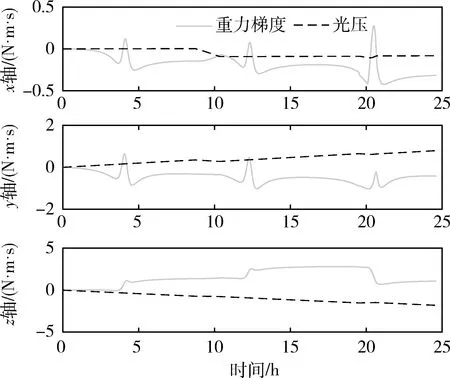
图9 对日对火偏置时空间力矩累积量(惯性系下投影)Fig.9 Intergration of space moment on offset attitude towards Mars(inertial coordinate)
比较图7和图9中重力梯度力矩累积量曲线,可以看出在第三轨的近火点附近,角动量变化有明显差异,其余时段曲线相似,表明对火偏置主要改变了近火弧段的重力梯度力矩.
3 结 论
根据中国首次火星探测任务规划,结合火星环绕器构型,分析了在中继轨道上执行中继通信作业时空间环境力矩特性,表明空间力矩每个火星日累积量达到2.77 N·m·s.由于火星上磁场微弱,使用磁卸载效率不高,只能通过喷气抵消空间力矩累积效应.在深空探测领域对燃料携带量极其严苛,使用喷气方式进行角动量管理会消耗宝贵的推进剂,且喷气会造成对轨道的扰动.
本文提出通过环绕器姿态偏置,改变光压和重力梯度力矩累积的方向和大小,使之相互抵消,达到减少总的空间力矩累积量的目的.并在姿态偏置方向上,选择了绕环绕器天线电轴方向旋转,避免对环绕器中继通信和对地数传作业的影响.通过角度偏置寻优在对日偏置7°、对火作业偏置-15°的情况下角动量累积量达到最小,和原先状态相比,1个火星日内空间力矩的累积量减少了70%.本方法在深空探测器角动量管理方面,提供了一种减少喷气卸载次数的设计思路,可节约燃料消耗,延长环绕器寿命.
由于姿态偏置角度的最优解和轨道参数、业务作业规划相关,在不同轨道条件下或任务作业更改时,地面需重新寻找最佳的偏置角度,以保证1个作业周期内的角动量最优.