鱼集群游动的节能机理研究综述
2021-04-24张天栋
张天栋 王 睿 程 龙 王 宇 王 硕 ,
集群是鱼类生物中一种常见的现象[1],研究表明,鱼类集群游动时效率通常比单独游动更高,在自然界中超过50%的鱼类会在某一时刻表现出同步、协调的集群游动[2].当迁徙时,许多鱼类会成群结队地朝同一方向游动,并且与邻近的同类保持接近恒定的间距[3],除了躲避天敌[4-5]、提高捕食成功率[6-8]等社会学优势外,集群游动还被认为可有效降低能耗[9-13].
鱼类集群游动高效节能的特点吸引了诸多学者的研究兴趣.科研人员开展了大量研究工作以期揭示鱼集群游动节能特点的内在原因,并提出了多种研究节能机理的方法,包括早期的鱼集群观察分析,或利用计算流体力学(Computational fluid dynamics,CFD)仿真研究鱼集群的流场结构,以及近年来通过仿生机器鱼等装置进行实验研究.在节能机理方面,目前存在的涡流假说(Vortex hypothesis)和槽道效应(Channeling effect)这两种主流假说[14],均从20 世纪70 年代Weihs 开创性地提出的两种节能假说发展而来[1].节能机理的研究一方面有助于设计高效节能的仿生水下机器人,另外一方面为水下机器人集群编队设计和控制提供启发与帮助,通过提升作业效率来适应军事和民用的需求,从而更加高效地开发利用海洋资源.
本文针对鱼集群游动节能机理的研究现状进行综述和分析,从三个典型方法,即观察分析法、计算流体力学仿真法和实验装置研究法的角度,概述了国内外已有的研究进展,并建立了统一的方法评价指标对各个研究方法的优劣性进行评估.在此基础上,总结分析鱼集群游动节能机理研究中的主要问题以及未来主要研究方向,为开展后续研究工作提供参考.
1 研究进展概述
关于鱼集群游动的节能机理,目前存在两种主流假说:涡流假说和槽道效应[14].其中,涡流假说认为,鱼类可置身于前方鱼的尾部涡流中,通过调整姿态利用尾涡降低与迎面而来的水流的相对速度.涡流假说如图1(a)所示,当前方鱼在游动时,脱落的尾涡会在身体后方形成反卡门涡街,并诱导出一个后向射流,因此在鱼群中,后方鱼会位于前方两条鱼的中间,避免处于前方鱼的正后方而遇到增大的来流,同时还能利用尾涡提高游动效率.槽道效应则指出鱼的推力因其近邻鱼和它们尾迹的靠近而增加,如图1(b)所示,鱼群中相邻鱼的靠近,可以促进两鱼之间水的流动,鱼类可以有效地利用旁边涡街诱导出的流动来提高游动效率.
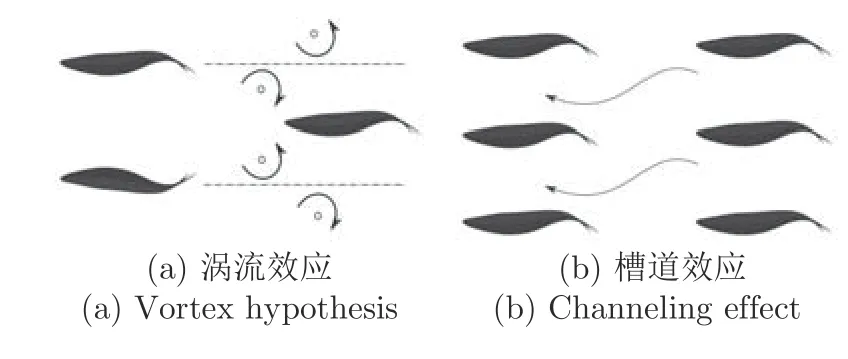
图1 两种节能机理假说示意图 [14]Fig.1 The schematic of two hypotheses of energy-saving mechanism[14]
基于研究方法的不同,本文将已有的鱼集群游动节能机理研究分为鱼群观察分析、计算流体力学仿真和实验装置研究三类,并结合研究结论支持的节能假说对研究现状进行概述和分析.
1.1 鱼群观察分析法
由于设备的限制,早期主要采用观察分析法研究鱼集群游动节能机理,通过直接观察鱼群游动的特点,并结合水动力学进行理论分析.随着观测技术的发展,在后期鱼群观察分析法中,主要运用高速摄像机、数字粒子图像测速技术(Digital particle image velocimetry,DPIV)、生物肌电信号测量仪、立体视频记录仪等技术手段对鱼群的生理信息、形态结构以及涡流特征等进行观测,再通过处理实验数据来揭示鱼群游动节能机理[15].其中,能量消耗主要通过理论推算[16]或DPIV 实验间接推算[17]给出.本节将依据研究结论所支持的节能假说,分成前后两部分介绍鱼群观察分析法的发展.表1 给出了鱼群观察分析法的发展历程.
据现有文献,最早进行鱼集群游动中节能机制研究的是Breder[18].通过观察发现,在鱼群中,鱼的侧向间距通常是从鱼侧面到其产生漩涡轨迹外缘的距离的两倍,这种分布确保了漩涡的完整性.他提出鱼群在游动时,维持这些漩涡的完整性对鱼类游动效率很重要,并认为这是决定一个鱼群中的鱼类相互接近程度的重要因素.
不同于Breder[18]只从定性的角度分析鱼集群游动的节能机制,Weihs[1,19]从定量的角度进行了开创性的研究工作,通过观察鱼群游动并从水动力学的角度构建鱼群二维编队水动力模型,他提出鱼集群游动时,最优队形呈图2 所示的菱形,认为在这种队形中,鱼既可避免遇到增大的来流,又可以有效利用涡街诱导出的流动,从而达到节能的目的,并预测处于最佳位置的鱼可节省40%~ 50%的能量.
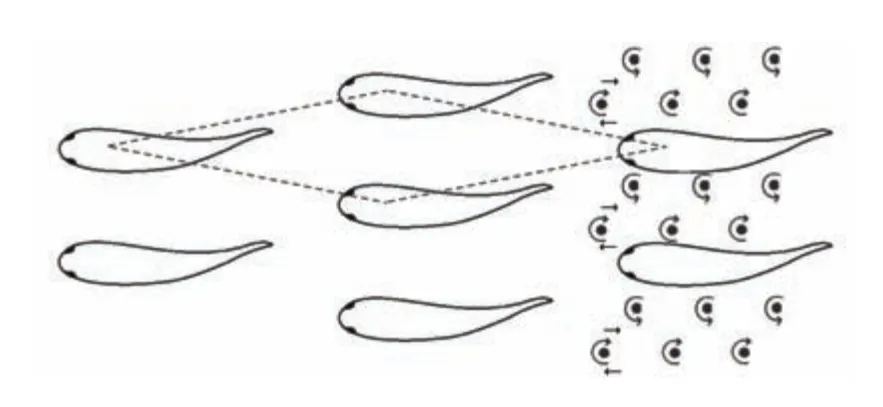
图2 鱼群菱形队形及涡街分布示意图,虚线表示菱形队形的形式[1]Fig.2 The schematic of fish schooling and near vortex streets.The dotted line shows a“diamond”pattern[1]
Fish 等[20]通过测量金体美鳊(Notemigonus crysoleucas)集群游动时的尾拍频率,发现集群中后方鱼的最大节能量超过20%.Herskin 等[10]通过测量9 条海鲈鱼(Dicentrarchus labrax)集群游动时的尾拍频率发现,在不同流速下后方鲈鱼的尾拍频率比前方鲈鱼降低9%~ 14%,对应耗氧率降低9%~ 23%.Svendsen 等[21]观察水槽中8 条大小均匀的拟鲤(Rutilus)组成菱形编队游动,分析每条拟鲤的位置和尾拍频率发现,在不同流速下,后方拟鲤的尾拍频率比前方拟鲤降低7.3%~ 11.9%.
Liao 等[22-25]开创性地提出鳟鱼的卡门步态(即利用涡流来保持在涡街中的稳态),同时利用DPIV观察涡流位置,并通过生物肌电信号测量仪测量鳟鱼游动时不同位置的肌电信号,来研究鳟鱼从涡流中吸收能量的机制.图3(a)为在匀速流动的水流中,鳟鱼自由游动时肌电信号的变化序列;如图3(b)所示,在鳟鱼游动前方放置一个D 形圆柱用以产生涡流,来研究鳟鱼在涡流中游动情况,其中圆圈表示没有(空白)、中等(浅色)或高(深色)肌肉活动的电极位置.发现鳟鱼能感知涡流并根据涡流位置进行大幅度摆动,相较于自由游动,鳟鱼仅激活前轴肌,减少了肌肉活动,有效降低了能耗.证明在与环境中存在的非自生旋涡相互作用时,鳟鱼会自动改变身体运动来从漩涡中获取能量,进一步支持了涡流假说.
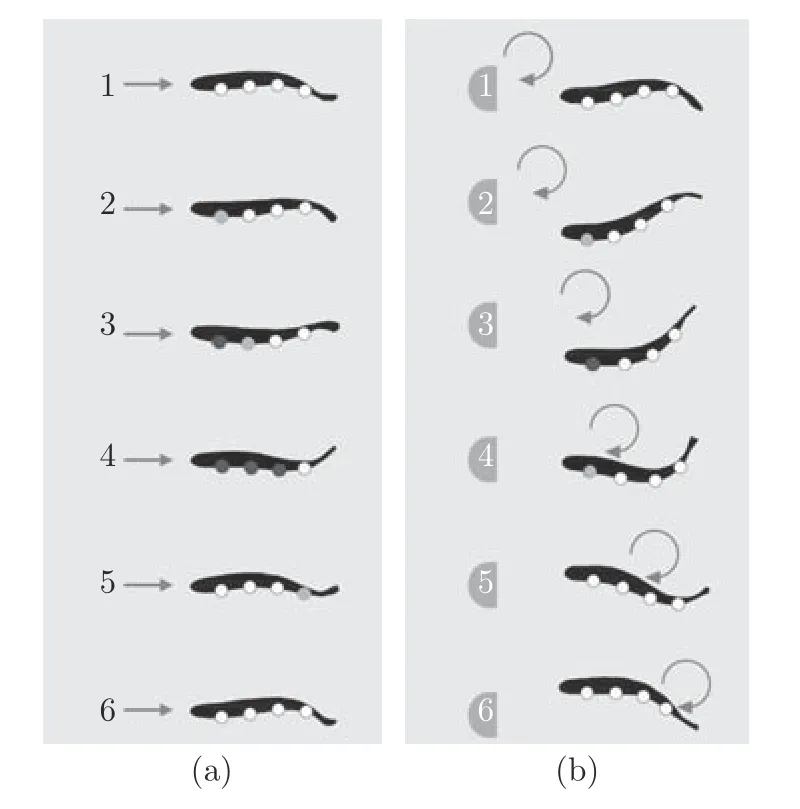
图3 鳟鱼在(a)自由流场中和(b)圆柱尾流中游动时其侧边肌肉活动性的差异,圆圈的颜色越深表示肌肉活力越大,能耗越高[22]Fig.3 The difference of red muscle activity between(a) trout swimming in free stream flow versus (b) trout holding station behind a cylinder.The color of the circle indicates muscle vitality[22]
Johansen 等[11]研究了胸鳍推进模式的鱼类在集群游动时的节能机理.观察一种主要靠胸鳍推进的唇形鱼——蓝带海鲫(Embiotoca lateralis)的游动,发现集群后方鱼的胸鳍拍动频率比集群前方鱼减少14.9±3.2%,与单独游动相比集群后方鱼的耗氧量减少25.6%.Johansen 等[11]认为蓝带海鲫拍动胸鳍时在尾迹处留下漩涡,这些漩涡可以减少阻力并增加对尾随个体施加的升力.
Marras 等[26]控制一条仿生机器鱼与金体美鳊在不同流速的水槽中一起游动,并使用DPIV 研究了水流结构.当仿生机器鱼的尾巴摆动时,金体美鳊更容易被机器鱼吸引.在特定条件下,金体美鳊会跟随在机器鱼后方游动.Marras 等[26]认为该现象说明,金光鱼可以在机器鱼的尾迹中获得水动力优势.
Halsey 等[27]通过视频数据跟踪鲈鱼的集群游动,确定每个目标个体所经历的水流速度和湍流大小,并分别测量了鲈鱼集群游动与单独游动时的尾拍频率.发现集群游动时的尾拍频率降低了7.5%,消耗能量更少.当集群规模较大时,尾拍频率会随流速的增加而降低;而在更大的湍流中时,测试的几种规模的鱼群的尾拍频率都增加了.Halsey 等[27]认为群体的规模可以调节水流对鱼类游动的影响,进而可能调节能量消耗.
涡流效应对集群行为的影响程度一直存在争议[28],通过实验观察,Pitcher 等[3]认为涡流效应对鱼集群行为的影响程度有限,并提出在涡流效应中,任何能耗高的位置和能耗低的位置之间的交替都需要利他主义行为.Liao[29]和Webb[30]认为集群游动能耗的降低可能是槽道效应与涡流效应的结合,而不是涡流效应的单独结果.
Burgerhout 等[31]观察7 条欧洲鳗鲡(Anguilla)组成的集群在可变流速的水槽中游动,并通过视频数据分析各种水速下鳗鱼的尾拍频率.结果表明,鳗鱼集群游动时的尾拍频率(2.6 Hz) 和耗氧量(21.3 mg O2kg-1h-1)均明显低于单独游动时的尾拍频率(3.8 Hz)和耗氧量(32.0 mg O2kg-1h-1),鳗鱼集群游动的功耗减少30%.然而与许多“菱形”形状编队游动的鱼相反,如图4 所示,鳗鱼倾向于以彼此平行的同步方式编队游动,这与涡流假说中利用尾部涡流来节省能量相悖.在对鳗鱼游动的流体力学研究时,发现横向喷射力指向游动方向[32-34],Burgerhout 等[31]认为鳗鱼集群在同步游动时可以利用个体之间的侧向力达到节能目的.

图4 鳗鱼集群游动照片[31]Fig.4 The photo of anguilla schooling [31]
Marras 等[35]在不同水速的非湍流层中测试了幼年灰鲻鱼(Liza aurata)的集群游动.如图5 所示,观察标记鱼(带点)在集群中不同位置的游动情况(负值表示标记鱼在其最近邻的后方游动、正值表示在前方游动、零表示并排游动),并测量尾拍频率与幅值.与单独游动相比,在鱼集群中处于邻近鱼周围任何位置的灰鲻鱼的能量消耗都降低了,其中处于最佳位置的灰鲻鱼的尾拍频率可降低28.5%,耗氧率降低了8.8%~ 19.4%.通过DPIV 发现,鱼前端周围的流体动力学也有助于其邻近的鱼向前游动.
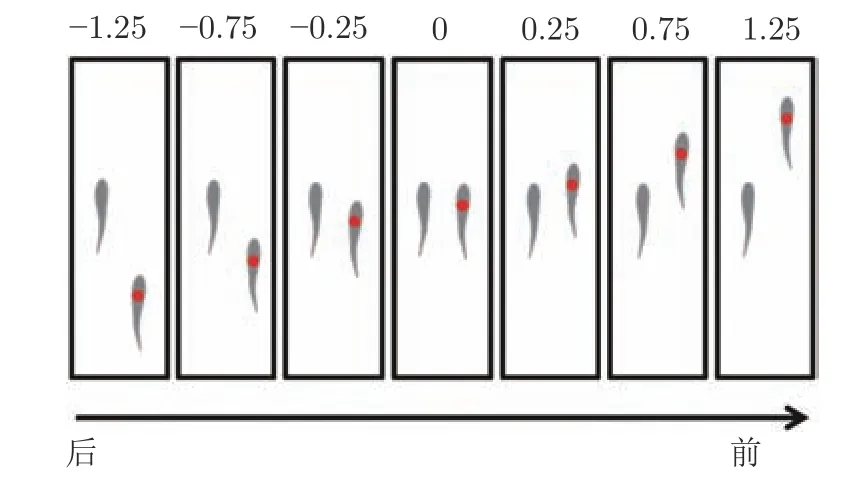
图5 鱼集群中,焦点鱼(带点)相对于其最近邻居的位置[35]Fig.5 Positions of the focal fish (with dot) relative to its closest neighbor in fish schooling[35]
Ashraf 等[36-37]使用一种会在高度凝聚的群体中游动的水族馆鱼——红鼻四头鱼(Hemigrammus bleheri)来分析集群节能机制.通过立体视频记录仪器来跟踪不同流速下,每条鱼的3D 位置及尾鳍摆动.结果表明集群游动相比单独游动具有节能优势.如图6 所示,图6(a)~ (d) 为水流速0.77 BL (倍体长)/s 时鱼群的编队情况,图6(e)~(h)为水流速3.91 BL/s 时的编队情况.当红鼻四头鱼被迫快速游动时,更倾向于“矩形”或“并列”编队.在这种队形中,所有个体并排游动,能够利用并排间的水动力相互作用,说明槽道效应在鱼群节能过程中发挥重要作用.Ashraf 等[36-37]还认为菱形编队的另一个局限性在于其强加了保持组内个体精确位置和准完美同步运动的强烈约束,不适用于嘈杂且依赖多参数的真实鱼群游动.
1.2 计算流体力学仿真法
近年来,随着计算机技术、复杂流体计算方法以及流体仿真技术的发展,一些研究人员开始将广泛应用于航空器流体力学分析的计算流体力学方法引入到对鱼群节能机理的研究中,并取得了一系列有意义的成果.不同于观察分析法只能获得定性的结果或者比较粗糙的定量结果,CFD 仿真法可以更加精确的定量分析鱼集群游动的节能机理.随着技术的发展,该方法从仿真单条到多条、从二维到三维、从自动到自主逐步改进提高.本节将依据研究结论所支持的节能假说,分成前后两部分介绍CFD 仿真法的发展.表2 给出了CFD 仿真法的发展历程.

图6 两种流速下鱼集群游动示意图.((a)~ (d):低速,(e)~ (h):高速)[37]Fig.6 The schematic of the fish schooling at two flow rates.((a)~ (d):low speed;(e)~ (h):high speed)[37]
计算流体力学仿真法主要基于二维或三维Navier-Stokes (N-S)方程来数值模拟水流中鱼集群游动的过程,并利用浸入边界法(Immersed boundary method,IBM)对其进行求解[38].对鱼类摆动时推进效率的定义与评估,Triantafyllou 等[39-40]提出了几种计算方法,大多采用Froude 效率或基于运输成本(Cost of transport,COT)的准推进效率进行计算.
Froude 效率为有用功率与总功率之比,对于稳定游动的鱼,Froude 效率将鱼向前(推力)所做的有用功与向侧方(由于侧向的尾巴摆动)所做的无用功分开,从而计算得到鱼消耗的总能量中转化为向前游动的有用部分占比.有关水动力、功率和效率的定义与计算,Borazjani 等[41-43]进行了详细的研究.其中,Froude 效率的计算式为

表1 鱼群观察分析法的发展历程Table 1 The development of the method of observation and analysis for fish schooling


Kelly 等[44-45]利用无粘流动模型对三条仿真鱼集群游动进行数值模拟,提出了尾涡动力学在鱼群协同游动中所起作用的定性模型,以及描述单个可变形体与附近单个涡相互作用的非线性控制系统的数学模型.结果表明鱼群中一条鱼制造的尾部漩涡可以被另一条尾随的鱼捕获,用以提高速度.Kelly等[44-45]认为捕获尾涡是集群游动的节能机制之一.Deng 等[46]与Chung[47]均从菱形鱼群中提取出三条鱼作为基本单元,采用改进的浸入边界法对其游动进行数值模拟.结果表明,位于前列两条鱼之间的后方鱼可以从前方鱼脱落的反卡门涡街中受益,提出是一种与尾鳍边界层涡度场相互作用的尾涡脱落机制提高了推进效率,降低了游动功耗.
Pan 等[48]、Shao 等[49]以及Xiao 等[50-51]利用改进的浸入边界法数值模拟了D 形圆柱后柔性板的被动运动,如图7(a)所示.当圆柱体与板之间的距离较小时,柔性板表面被涡流层包围,并且被动地周期性振荡,说明在尾涡中被动柔性板可以被动获得推力,与单个柔性板相比推力系数提高了4 倍.Chao 等[52-53]利用商用CFD 软件包对两个平行D形圆柱与NACA0012 柔性板系统的非定常流场进行了数值模拟,如图7(b)所示,发现上游圆柱的存在增强了其尾流中的反卡门涡街,提高了推力.
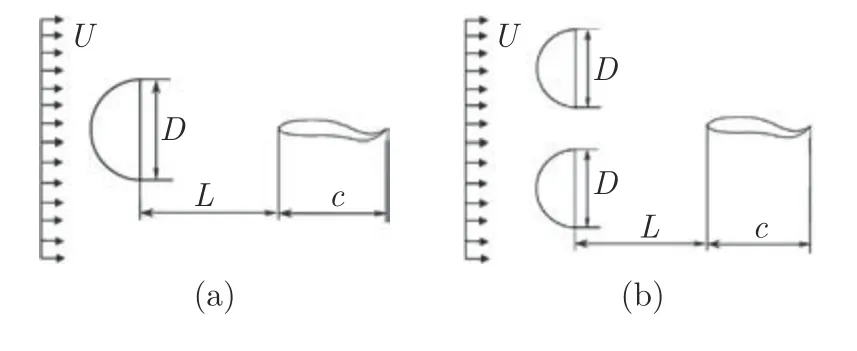
图7 柔性板运动实验示意图 ((a)单个D 形柱;(b)两个D 形柱)[52]Fig.7 The schematic of flexible foil movement experiment ((a) Single D-cylinder;(b) double D-cylinder)[52]
Khalid 等[54]数值模拟了两条仿真鱼在串联队列中的游动.通过研究仿真鱼的水动力傅里叶谱发现,后方鱼与前方鱼的振荡频率是非线性相互作用的,并产生了新的水动力分量.当前方鱼释放的漩涡与后方鱼的前缘相互作用时,漩涡分成两部分,并与鱼体周围的剪切层相互作用,促进后方鱼向前游动,提高游动效率.
Tian 等[55-56]数值分析了匀速水流中一对子母鱼的游动,发现两条鱼在串联与交错编队时都能提高游动效率.通过对尾涡结构的分析,发现涡流控制是提高尾鱼性能的重要机制,并认为鱼可以通过增强反卡门涡街或减少卡门涡街而获益.
Maertens 等[57]数值模拟了双鱼编队游动,发现前方鱼只在很小的范围内才有能耗优势,而后方鱼可以在任何能与前方鱼尾迹相互作用的位置受益,前提是其步态相对于迎面涡是适当的,即充分利用尾涡.对于相距一倍体长的串联结构,正后方鱼的效率相较单条鱼可以提高10%,而在偏移正后方的位置可以提高30%.Li 等[58]对双鱼编队游动进行了三维仿真,定量评估了双鱼系统在不同位置和相位关系下能耗与受力情况,发现为了维持稳定的集群游动,应考虑在能耗与稳定性之间进行折衷平衡.
Gazzola 等[59]在数值模拟中,利用受毕奥—萨伐尔定律(Biot-Savart law)约束的涡流偶极子来模拟仿真鱼集群游动.有限涡流偶极子模型是将鱼类游动从形态和运动特征中抽象出来的一种极端理想化模型[60-61].Gazzola 等[59]开创性地引入强化学习的方法使仿真鱼具有自适应决策能力来调整步态,以响应非线性变化的水动力约束.结果表明,仿真鱼可以通过调整功率及集群中的位置来保持稳态,利用进化策略算法发现最佳的编队形态是“沙漏”形,并在游动方向拉长.
Novati 等[62]与Verma 等[63]研究了鱼群如何利用涡流来提升游动效率.分别基于二维和三维粘性不可压缩N-S 方程进行高保真度的计算流体力学仿真,设计了基于深度递归神经网络强化学习算法的运动控制策略.研究了两条排列成一个先导—跟随结构的自主仿真鱼,其中先导者的步态固定,跟随者通过强化学习来调整步态同步游动,以克服先导者的涡流尾迹所产生的力,使其与先导者路径的横向偏差最小.最终,在持续的同步串联游动中,跟随者的能量消耗减少30%,游动效率增加20%.仿真结果表明鱼类可以通过将自己置于前方先导鱼身后的适当位置并拦截其脱落的涡流来提高自身推进效率.
王亮[64]数值模拟了二维仿真鱼群游动,提出鱼群游动时不仅存在涡流效应,还存在槽道效应.发现仿真鱼可以利用侧向涡来提高自身的推进效率,当落后半个身长时节能效果最好,同时侧向距离越近节能效果越明显.但是,在侧后方仿真鱼节能的同时,前方仿真鱼的能耗却会增加,所以利用侧向水动力的情况(即槽道效应),多出现在小鱼跟随大鱼的游动.当体形相差不大的鱼进行集群游动时,主要利用前方鱼的尾涡来提高推进效率(即涡流效应),可以节能15%~ 25%左右.
Dong 等[65]对平行排列的波动板进行了数值模拟,研究其同相位与反相位同步运动,如图8 所示.其中,每个波动板的中线都以流线型行波的形式进行横向运动,用来模拟鱼游动时的脊骨起伏.结果表明,横向干扰有利于节省同相情况下的游动功率,提高反相情况下的游动推力.
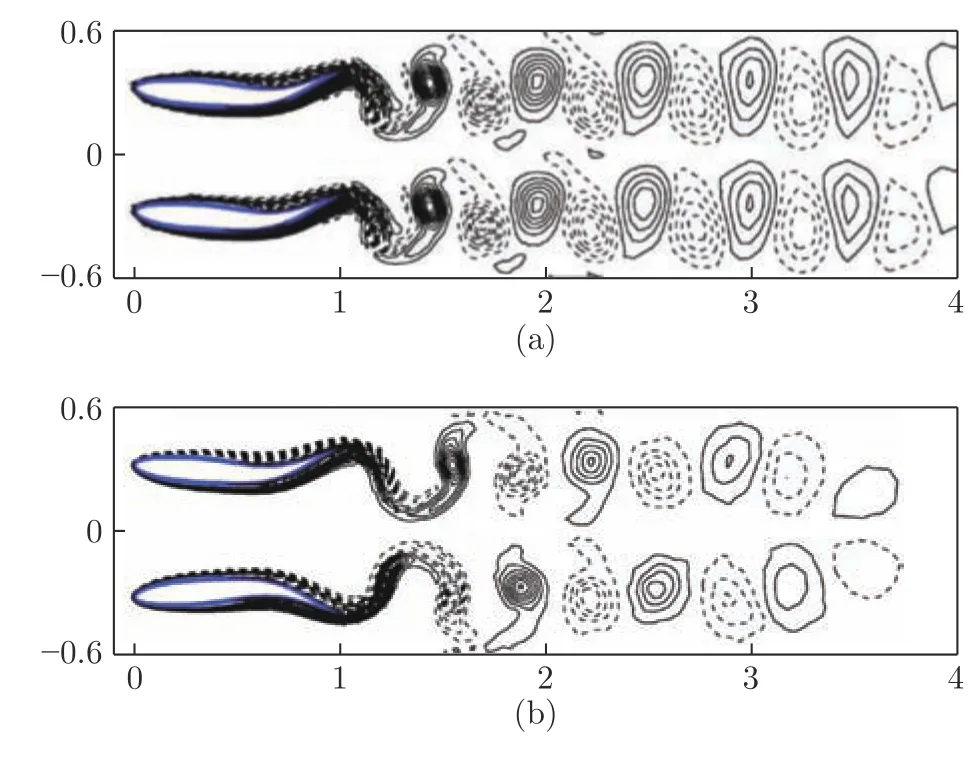
图8 平行排列的波动板运动示意图 ((a)同相位同步运动;(b)反相位同步运动)[65]Fig.8 The schematic of traveling wavy foils movement in a side-by-side arrangement ((a) In-phase synchronous movement;(b) anti-phase synchronous movement)[65]
Daghooghi 等[14]数值模拟了三维仿真鱼以各种矩形编队自主同步游动,发现鱼间的横向距离减小可以提高中间沿游动方向的流体速度,当鱼之间横向距离在0.3 倍体长时,同等能量消耗下,鱼集群游动的速度比单独游动快20%,说明单靠鱼间流体动力相互作用就足以产生高效的集群游动,这有力地支持槽道效应.仿真结果还显示,与单条鱼的尾涡不同,鱼群编队游动的尾涡会迅速分解为小而杂乱无序的涡旋结构,这些涡旋结构很难被后方鱼利用,说明矩形编队很难利用涡流假说解释.
Hemelrijk 等[66]与Li 等[67]均数值模拟了4 种不同编队(即串列、方阵、菱形和矩形)仿真鱼集群游动,如图9 所示,通过分析Froude 效率发现,鱼编队游动均比单独游动时效率更高(十分密集的编队除外).Hemelrijk 等[66]认为当流体从一侧通过身体时,会产生一个压差,个体将受到一个侧向力,由于身体波动,有一个向前的分量推动前进.Li 等[67]发现在间距较小时,由于前方鱼的尾迹较大,后方鱼可以获得较大的推力系数,而对侧边鱼造成较大的横向功率损失.当间距较大时,前方鱼和侧边鱼引起的尾流与压力都变小.当鱼群间距小于1.25 BL时,串列编队平均游动效率最佳;当间距为1.25 BL时,串列、菱形和矩形编队的效率相差不大;当间距大于1.25 BL 时,矩形编队的效率高于其他编队.Li 等[67]认为这说明尾流和鱼体摆动产生的压力是影响Froude 效率的重要因素,尾流主要影响推力,鱼体摆动产生的压力主要影响横向功率损失.
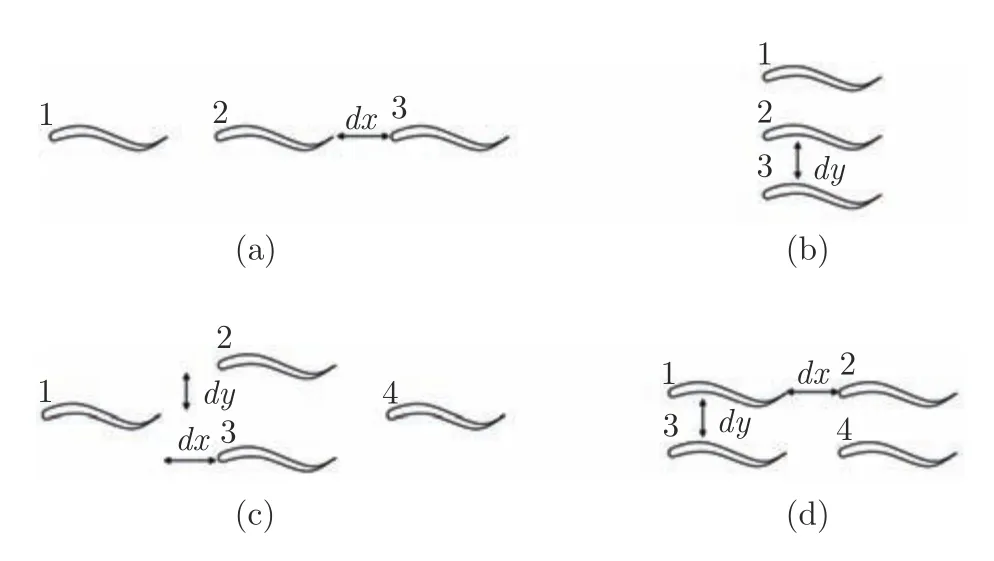
图9 4 种集群编队结构的示意图 ((a)串列;(b)方阵;(c)菱形;(d)矩形.其中相邻点横向间距为dy,纵向间距为dx)[67]Fig.9 The four kinds of formation configurations((a) tandem;(b) phalanx;(c) diamond;(d) rectangle.Lateral spacing between neighbors is given by dy and longitudinal spacing by dx)[67]
谢春梅等[68]数值模拟了两个前后排列的柔性细长体的自主推进运动,如图10 所示,研究了3 种基本的排列形态:远距离前后排列、近距离前后排列和并行排列.结果表明远距离前后排列形态几乎不受横向间距距离的影响,后方细长体始终会穿过前方细长体脱落的尾涡;近距离前后排列时,前方细长体表面的剪切层或脱落的涡对后方细长体产生影响,使得两个物体的运动和受力产生有一定的相位差;并行排列时,两细长体的剪切层会合并脱落形成反卡门涡街.受水动力相互作用的影响,并行排列推进的速度最慢,远距离前后排列其次,近距离前后排列推进速度最快.Peng 等[69-71]数值模拟了两个波动板的4 种典型运动,如图10 所示,图10(b)为交错跟随模式,两个板如同合并成一个更长的板,后方出现类似单鱼游动时产生的涡街;图10(c)为交替引导模式,在尾流中可以清晰地观察到反卡门涡街;增加板的弯曲刚度,出现的非周期模式;增加板间距离至板的横向流动相互作用可以忽略不计时,为非干扰模式.仿真结果发现交错跟随模式下推进速度和效率最优.在中等弯曲刚度下,法向力对波动板的运动性能的提高有很大的贡献,而尾流涡街的利用对性能提高较少.
Dai 等[72]分别数值模拟了2、3 和4 条仿真鱼组成的编队自主游动,如图11 所示.通过计算发现,与单条鱼相比,集群中仿真鱼的COT 降低幅度较大的编队有:两条鱼并排反相位同步游动(图11(a)),减少16%;4 条鱼形成紧密的矩形(图11(l)),减少14%;两条鱼紧密串列(图11(c)),减少14%;以反相位模式并排排列的三条鱼(图11(g)),最多可减少13%;三条鱼的I 型交错编队(图11(j)),减少11%;4 条鱼的菱形编队(图11(n)),减少9%;两条鱼紧密交错(图11(e)),减少7%.其他编队COT 变化不大.结果表明,被动水动力相互作用的存在可以显著地提高鱼集群游动中的能量消耗.同时,与其他几组高效的编队相比,菱形编队并没有表现出任何节能优势,说明涡流假说并不是集群节能的最主要原因.
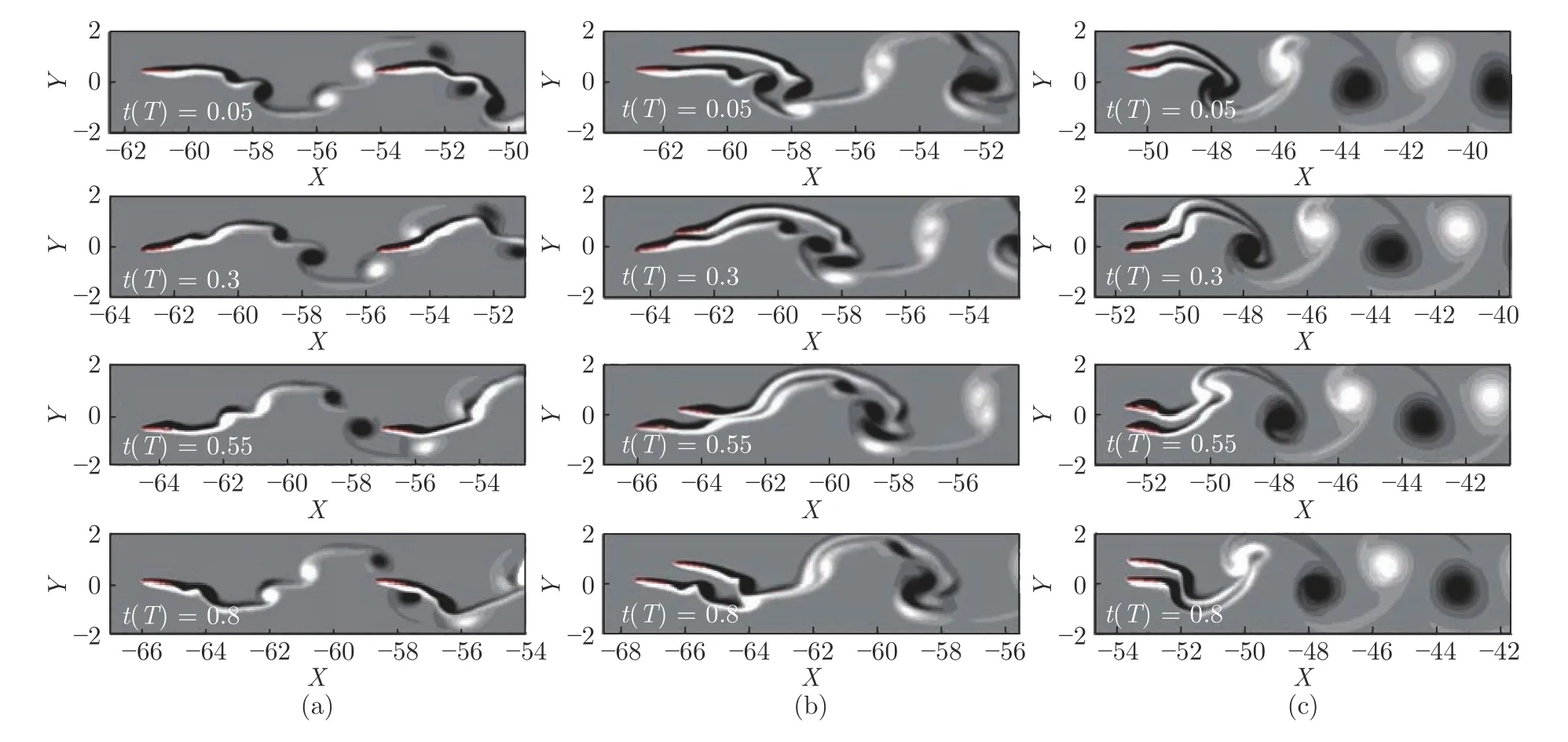
图10 三种前后排列的双鱼编队仿真示意图 ((a)远距离前后排列;(b)近距离前后排列;(c)并行排列)[68]Fig.10 The simulation schematic of the double-fish formation ((a) long range fore-and-aft arrangement;(b) short range fore-and-aft arrangement;(c) parallel arrangement)[68]
Lin 等[73-76]数值模拟了串联鳗式游动.发现仿真鱼协同游动可以起到节能效果,相位差越大速度提升越多.节能原因主要是中间位置的仿真鱼效率提升,并且随着数量的增加而增加.通过相互之间的流体动力作用,仿真鱼可以自发的形成紧凑的队形.
Park 等[77]数值模拟了二维柔性波动板在串联、对角、三角形和菱形编队中自主运动,并分析了波动板之间流体介质的相互作用.其中,每个波动板的前端做横向起伏运动,后端随周围的流体被动运动.在串联和对角编队中,后排波动板的功率分别比前排波动板低14%和6%.三角形和菱形编队的平均效率分别比单独运动时提高了14%和19%.在菱形编队的第2 列和第3 列中运动的波动板功率可分别减少约24%和40%.
Chen 等[78]通过数值仿真研究了三条鱼编队的推进力和功率消耗.相较于单独游动,集群游动最大的平均功耗可以减少20%.Chen 等[78]认为主要有两种原因产生节能效果:1) 在鱼体波动周期的某时刻,两条鱼之间由于槽道效应产生的低压区可以被动地促进头部偏转和尾鳍摆动;2) 前方鱼产生的漩涡有助于后方鱼头部的摆动,利于降低功耗产生节能效果.
1.3 实验装置研究法
在鱼群观察分析和计算流体力学仿真的基础上,一些研究人员开始设计实验装置,以期通过实
验来研究鱼群游动的节能机理,但这方面的研究仍处于起步阶段.本节将依据时间顺序介绍.表3 给出了实验装置研究法的发展历程.
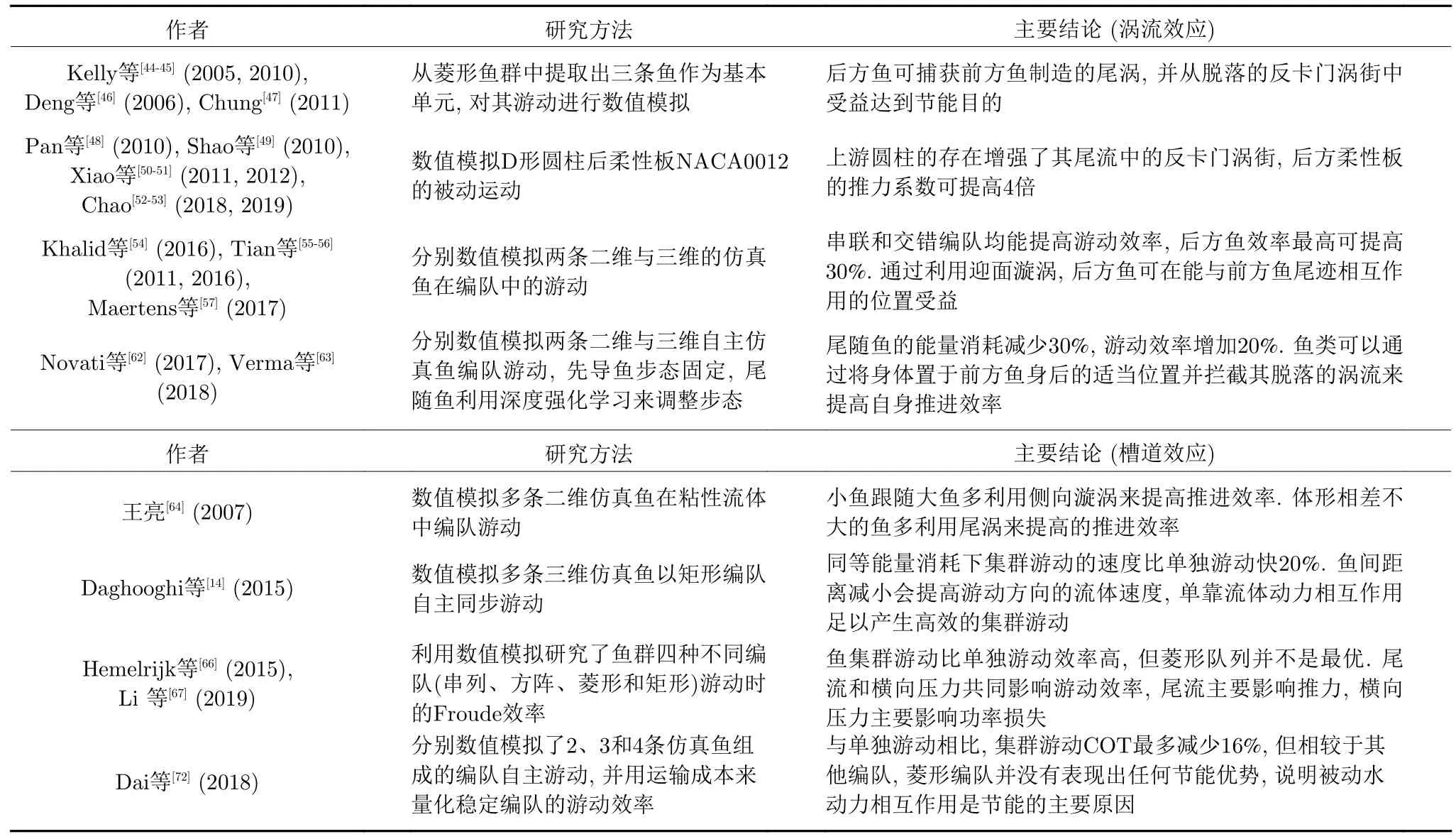
表2 CFD 仿真法的发展历程Table 2 The development of the method of CFD simulation for fish schooling
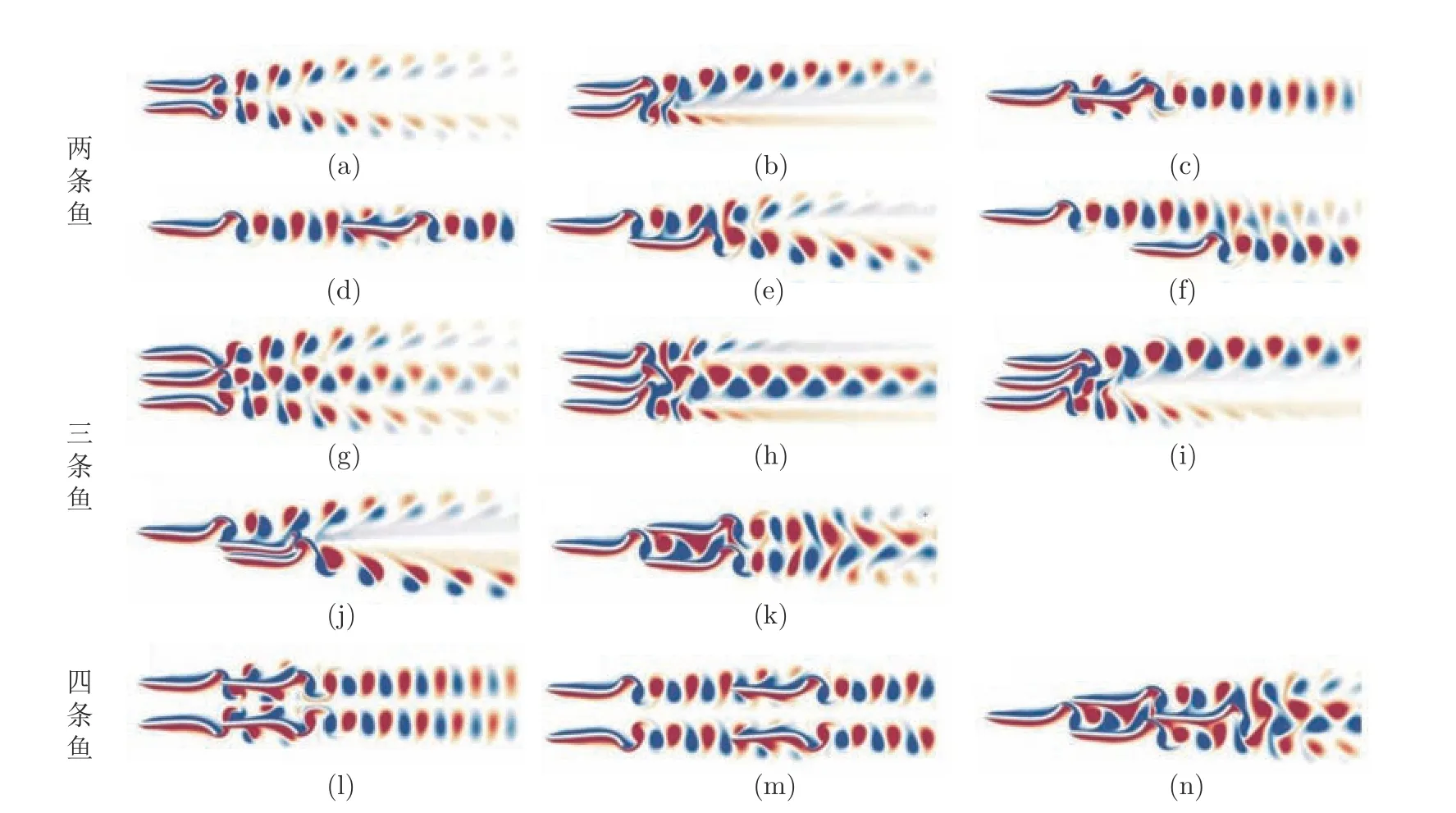
图11 由两条、三条和四条鱼组成的队列及涡度结构示意图 ((a)两鱼并排(反相位);(b)两鱼并排(同相);(c)两鱼串列(紧凑);(d)两鱼串列(松散);(e)两鱼交错(紧凑);(f)两鱼交错(松散);(g)三鱼并排(反相位);(h)三鱼并排(同相);(i)三鱼梯队;(j)三鱼交错(I 型);(k)三条鱼交错(II 型);(l)四条鱼矩形(紧凑,反相位);(m)四条鱼矩形(松散,反相位);(n)四条鱼菱形)[72]Fig.11 The swarm configurations and flow structures of two,three and four fish ((a) two fish side-by-side (anti-phase);(b) two fish side-by-side (in-phase);(c) two fish in-line (compact);(d) two fish in-line (loose);(e) two fish staggered (compact);(f) two fish staggered (loose);(g) three fish side-by-side (anti-phase);(h) three fish side-by-side (in-phase);(i) three fish echelon;(j) three fish staggered (type I);(k) three fish staggered (type II);(l) four fish rectangular (compact,antiphase);(m) four fish rectangular (loose,anti-phase);(n) four fish diamond)[72]
Dewey 等[79-80]与Boschitsch 等[81]分别研究了两个相同的仿生柔性水翼在并列与串列结构中摆动的水动力性能.实验装置如图12 所示,通过伺服电机驱动仿生水翼在稳流水槽中摆动,并利用高速相机及DPIV 观察分析.Dewey 等[79-80]还提出柔性水翼在流体中摆动模式的效率计算方法,即
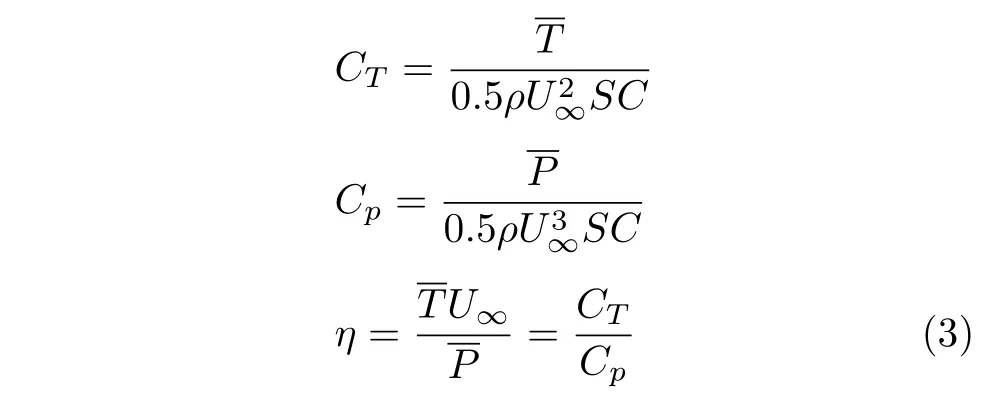
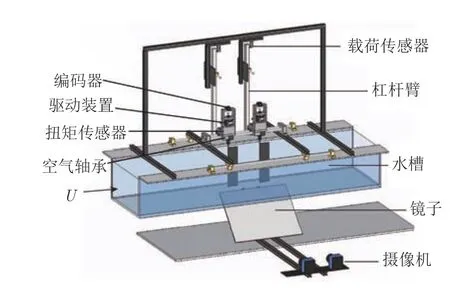
图12 仿生柔性水翼实验装置[81]Fig.12 The experimental setup with bionic flexible hydrofoil[81]
Ryuh 等[82]以通用型多关节机器鱼“Ichthus V5.5”为载体,设计了一种多智能体机器鱼系统,该系统由多架浮标机器人和仿生机器鱼组成,采用Petri 网理论实现集群控制,其中浮标机器人汇总数据,并为仿生鱼群提供感知信息,指导鱼群自主导航和协同运动.结果表明,从定性的角度仿生机器鱼群游动效率更高,可以更加高效地完成任务.
Becker 等[83]通过扑翼阵推进实验和仿真分析,研究了受涡流影响的群体交互运动特性.实验装置如图13 所示,电机控制垂直轴的上下起伏频率与幅值,带动两个水翼起伏运动,通过低摩擦旋转轴承的连接,水翼可以实现自主推进.使用透明壁水箱来可视化流场,并测量水翼的旋转速度.在实验中,通过增加连接到组件的水翼数量,可以减小编队中成员之间的间距并放大交互作用.增加拍打频率或振幅带来更快的运动速度,从而产生更强的水流.结果表明,仅通过流体动力学相互作用足以产生互相耦合的集群运动,从而提高速度并节省功率.
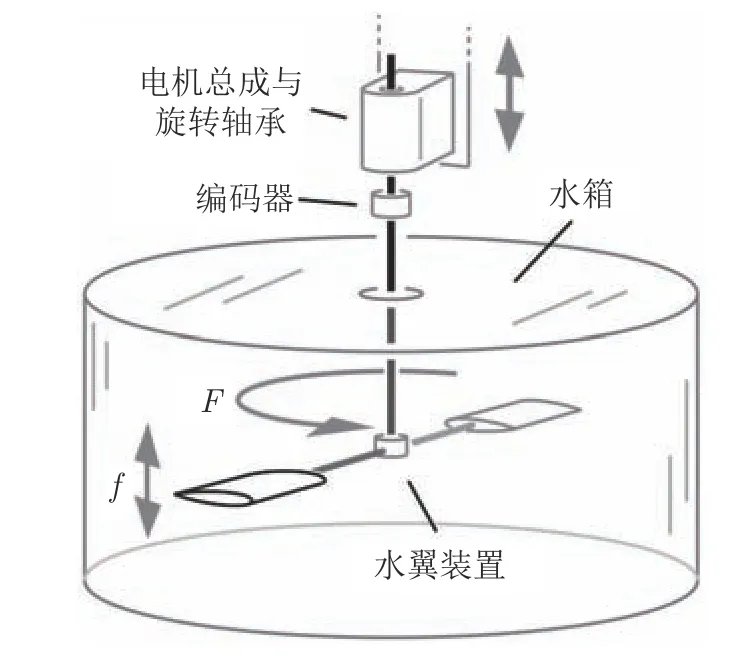
图13 旋转轨道上扑翼阵推进实验装置[83]Fig.13 Experiment setup of flapping wings moving in rotational orbits[83]
裴正楷等[84-85]以北京大学智能控制实验室研制的3 关节仿鲹科机器鱼为实验载体,结合在线实时功率检测系统,对双鱼并排运动的群体水动力、速度及功耗情况进行研究,实验机器鱼如图14 所示.实验结果表明,双鱼在同相位摆动时,群体功率消耗最小,效率最高;反相位摆动时,群体纯功率消耗最大,但速度也达到最大;群体速度在摆动相位差为和时最小.裴正楷等[84-85]认为机器鱼在流体中运动时,流体对于摆动躯体和尾鳍的作用力推进机器鱼运动,同时流体也会受到反作用力产生侧向速度.通过流体传导,并排运动的机器鱼在特定相位差时可以相互促进,提高运动效率.
Zhang 等[86]使用由混合动力控制系统驱动的软体机器鱼作为实验对象,基于全局视觉定位,设计了软体机器鱼集群控制系统,实现多种集群编队运动.结果表明,软机器鱼个体可以快速协调并形成一个集群系统,从而提高游动性能与实际应用中的功能.
综上所述,鱼集群机理的研究主要有鱼群观察分析、计算流体力学仿真和实验装置研究三种方法.在观察分析法中,通过使用高速相机或DPIV 等设备观测真实鱼类的游动过程,研究人员可以利用观测结果定性或比较粗糙地定量研究鱼类集群游动的节能机理.在计算流体力学仿真法中,研究人员基于真实鱼游动模型、特定流体边界条件进行流体力学仿真,可以定量分析鱼集群的游动性能与编队形状、涡流分布等因素之间的关系.在实验装置研究法中,研究人员通过设计仿生装置,在真实水动力相互作用下定量分析节能机理.随着技术的发展,研究方法逐步改进优化.鱼群观察分析法观测精度逐步提高、观测对象更加丰富,计算流体力学仿真法仿真数量及队形不断丰富、仿真对象更加准确智能,实验装置研究法装置更加丰富准确.表4 从能否反映真实游动情况、能否精确定量分析、是否方便研究各种队形等几个方面,对比分析了三种研究方法的优缺点.其中,鱼群观察分析法能直观显现鱼群游动时的编队及涡流结构,反映真实的水动力学关系;但不易精确定量分析,鱼群队形不易保持稳定.计算流体力学仿真法可精确定量分析鱼群游动过程,方便模拟各种鱼群队形并保持稳定;但仿真结果受游动模型精度、边界条件选取的影响,可能与真实情况有偏差,不能反映真实的水动力学关系.实验装置研究法可反映真实水动力学关系,易保持鱼群队形,并且可精确定量分析;但无法完全模拟鱼游动过程,对实验装置和平台要求较高.

表3 实验装置研究法的发展历程Table 3 The development of the method of experimental setup research for fish schooling
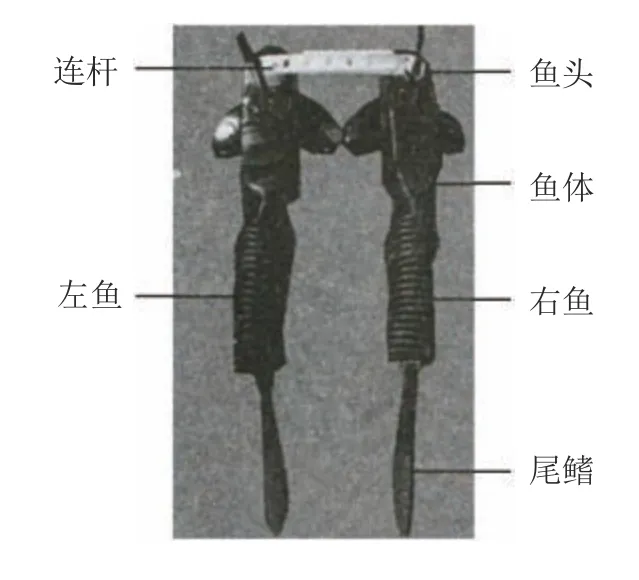
图14 并排链接的两条机器鱼[85]Fig.14 Side by side linked robotic fishes[85]
2 主要问题及发展方向
鱼集群游动节能机理的研究是一个复杂的交叉学科研究问题,涉及到鱼类行为学、流体力学、仿生学、机器人学、计算机科学、机械工程、控制科学等诸多学科的内容.虽然国内外已经进行了大量研究,取得了很多研究进展和成果,提供了多种研究方法,并总结了两种主要的节能假说,但仍没形成公认完善的鱼集群游动节能机理.问题主要体现在作用机制不清、节能机理不明、集群方法单一.现有的节能理论无法量化指导仿生鱼群高效节能运动,相关节能机理的基础理论研究仍需进一步完善;游动节能机理不明制约节能构型设计,对大规模鱼群编队的研究较少;在真实水环境下的实际验证与应用还很少,仿生机器鱼集群方法单一.因此,为了进一步探究鱼集群游动节能机理,指导仿生机器鱼群高效节能运动,还应针对所提出的几个主要问题深入开展工作.
2.1 鱼群节能游动作用机制研究
已有的涡流假说与槽道效应等节能理论均存在一定局限性,都或多或少地简化了鱼类游动过程及水动力学模型,不能较好地解释所有的鱼集群游动行为.有研究表明,当鱼进行低速游动时,更多采用交错跟随的形式,而当鱼需要高速游动时,会采用并列的队形游动[37].在鱼群中,节能可能是对涡流利用与槽道效应共同作用的结果.因此,亟需研究鱼群—流场耦合作用机制并探索节能机理,基于鱼群游动中的不可压粘性流动数值分析,结合流体力学、波动板理论、细长条理论等多种理论方法,揭示构型、运动参数与推进效能之间的关系,从而量化指导仿生机器鱼群高效节能运动.

表4 三类研究方法特点对比Table 4 Comparison of three kinds of research methods
2.2 鱼群高效节能构型生成与节能机理研究
由于实验环境、仿真计算资源等方面的限制,以及对鱼群形态结构及其节能特点的认识还有待完善,现有研究大多是针对单条鱼或小规模鱼群的观察与水动力分析,多鱼编队研究较少且编队形态较简单,而自然界中存在许多编队形态复杂的大规模鱼群.因此,亟需探究仿生鱼群高效节能构型生成并阐释节能机理,结合拓扑学、强化学习、多智能体控制、计算机仿真等理论与方法,探寻更加高效的节能构型与游动策略优化,为节能机理研究提供依据,同时为实际水下机器人编队设计提供理论基础与指导.
2.3 仿生机器鱼集群方法研究
近年来,一些研究人员通过实验装置来分析与验证鱼群节能机理.相较于鱼群观察分析和计算流体力学仿真,实验装置研究可在真实水动力相互作用下定量研究各种节能构型、探究节能机理.目前,实验装置研究仍处于起步阶段,在真实水环境下的验证与应用还很少,仿生机器鱼集群方法单一.因此,亟需开展多自由度仿生机器鱼集群高效节能运动实验研究,结合仿生学、机器人学、机械工程、控制科学等学科知识¸ 研制刚柔耦合仿生机器鱼群实验平台并进行集群运动研究与验证.在仿生机器鱼集群方法上,结合人工智能、运筹学、控制科学等学科知识,形成分布式的协同感知、协同规划、集群控制为一体的协同运动技术体系.在研究节能机理的同时为实际水下机器人编队设计与控制提供指导.
3 结论
集群是鱼类等生物的一种常见的生存现象.在鱼群中,通过局部信息交互,个体可以获得更大的感知范围,有利于发现食物或躲避天敌.同时,鱼群集群游动过程中的水动力优势可以有效节省能量消耗,提高鱼群的游动效率.节能机理的研究为高效的水下机器人集群编队设计和控制做基础.
本文对国内外关于鱼集群游动节能机理的研究工作进行了概述,基于鱼群观察分析、计算流体力学仿真和实验装置研究三种研究方法介绍了鱼集群游动节能机理研究的进展情况.在此基础上,分析总结了鱼集群游动节能机理研究的主要问题及未来还需进一步开展的研究和论证,包括需进一步完善节能基础理论,探究鱼群高效节能构型生成与游动策略优化,研制仿生机器鱼群实验平台实现仿生鱼集群技术系统化.
