新型光伏电梯系统BLDC 电机的仿真分析
2021-04-24陈轩海涛
陈轩 海涛
(广西大学电气工程学院,广西 南宁530000)
1 概述
随着新能源的开发,光伏的利用越来越多的走进了我们的生活当中,并且应用于各种场合,光伏电梯的发展是从2009 年国内首台电梯的出现到2020 年通力电梯公司应用型平台的搭建并且试验运行成功。而本文将采用BLDC 电机作为电梯的曳引机,无刷直流电机与一般的电机不同的是转子为永磁铁,而定子为多相通电绕组,电机通过霍尔传感器收集转子位置反馈信号从而控制不同组别的绕组通电通过PWM方波形式控制电机转动,而对于其的控制方式一般是采用开环和双闭环来进行控制,但开环控制的可控性差且双闭环控制应用广泛并常用作于控制调速,所以本文将采用伺服电机的三闭环控制方式来对BLDC 无刷直流电机进行控制并进行仿真分析。
2 光伏电梯系统
本文设计的光伏电梯系统框架如图1 所示,通过太阳能对光伏电池进行充放电再将能量存储在蓄电池中,蓄电池在BLDC 电梯功能中保障电梯上下行曳引运行,而系统也提供了太阳能和电网双供电模式,为电梯正常运行提供了可靠的保障。
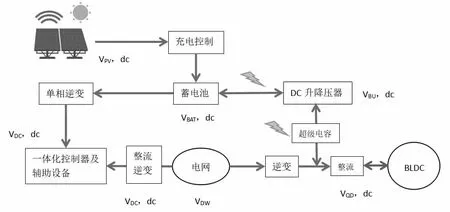
图1 系统主体图
2.1 光伏发电
由于BLDC 无刷直流电机只需要直流电就可以运行起来,所以对于光伏阵列输出电流能满足其运行并且可以把多余的直流电存储于蓄电池中,由于系统构成中没有逆变器,因此该系统只能为直流负载供电。光伏阵列采用MPPT 最大功率跟踪法采集太阳能能源,并通过充放电控制器来控制整个光伏发电系统的运行,当电池存储量达到饱和值时,由蓄电池对BLDC 电梯进行供电,而在其他情况则是由电网的交流电通过逆变变换输出的直流电对电梯进行供电。
2.2 BLDC 电机器PID 控制
而对于BLDC 电机最繁杂的就是它的控制模式,BLDC 的控制是采用DTC 控制器和电机,但对于DTC 控制一般采用三闭环控制,闭环控制系统从反馈角度看是在系统的输出端与输入端存在反馈回路,输出量对控制过程产生反作用的控制系统,核心是通过反馈来减少被控量的偏差。对于各种闭环控制策略中由于PID 结构简单而被广泛的运用,通过对比例、积分、微分来实现线性控制。
在多数情况下,需离散变化后方可使用,因此其离散化后的公式:

式中:Ki=KpT/Ti为积分系数;Kd=KpTd/T 为微分系数,e(k)、e(k-1)是第k、k-1 次输入误差量,T 为采样周期。
在PID 算法控制中,Kp、Ki、Kd每一项都有单独的系数,但是在真正运用的场景中很难确定这三个系数值的大小,因此就需要大量的实验以及查找资料来确定合适的数据,这样才能实现对电机运行精确稳定的控制。
2.3 BLDC 电机三闭环控制策略
所谓三闭环控制系统就是在速度- 电流双闭环控制系统的方式上再外加一个位置外环,在控制电机的速度大小和旋转方向的基础上,添加了转子位置角度控制。一般转子速度控制是通过输入给定值或改变脉冲频率,这可以实现电机调节转速大小和方向,位置控制系统也支持直接负载外环检测位置信号,此时的电机轴端的霍尔传感器检测电机转速由最终负载端的检测装置来提供位置信号,这样做的优点在于可以减少中间传动过程中的误差,增强系统的电机转速定位精度控制,对位置给定进行准确的跟随,位置控制系统转动速度的大小通常是通过外部输入的脉冲频率来改变的,转动的角度是通过单个时间周期内脉冲个数来确定的。
BDLC 三闭环控制结构图如图2 所示,系统主要有电流、速度、位置三个调节器以及PWM控制器为基准来实现对无刷直流电机的控制,现就对三闭环负反馈PID 调节系统,分别做出以下介绍:
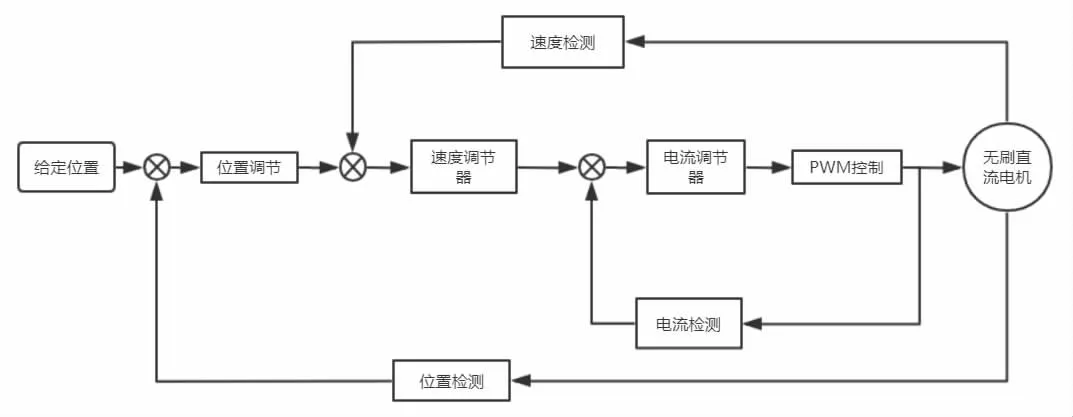
图2 BLDC 三闭环控制结构

图3 BLDC 三闭环仿真图
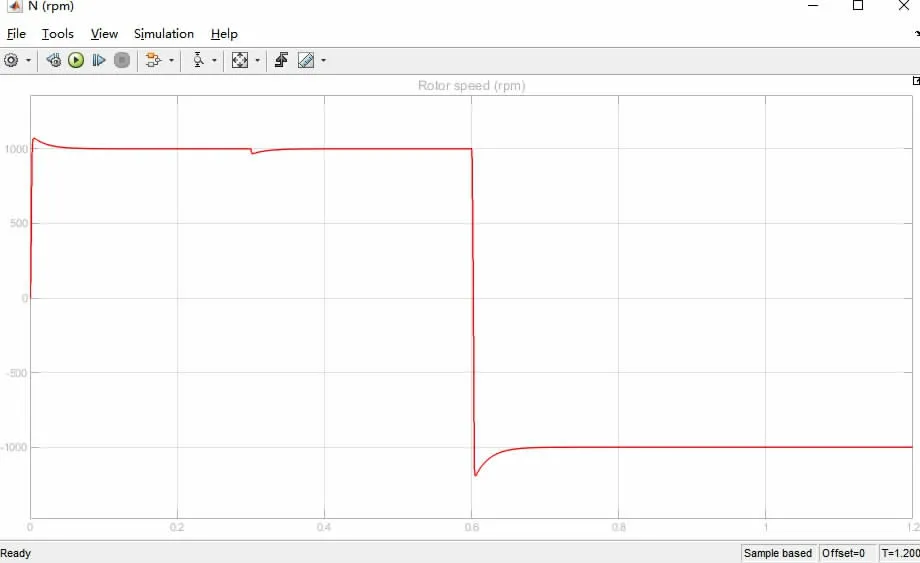
图4 转矩
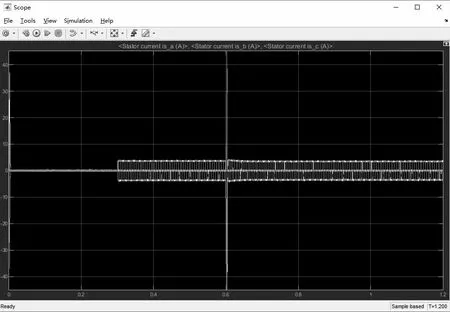
图6 霍尔传感器反馈信号
(1)其中内环为电流内环,该内环完全在处于DTC 驱动器内部,通过霍尔装置对驱动器电机各相的输出电流进行检测,并将负反馈信息输入给电流调节器,再通过PWM控制设定来进行PID 调节,从而使得输出电流尽量与设定电流保持一致性,电流内环主要的功能就是控制电机转矩,因此一般在转矩模式下,驱动器设定运算值越小其动态响应的时间越短。
(2)处于二环的是速度环,通过检测霍尔传感器反馈回来的信号频率来计算电机转速大小从而进行负反馈PID 调节,其环内PID 输出就直接作为电流环的设定值,所以速度环的整体性控制范围就将速度环和电流环包含在内。
(3)处于三环的是位置环,该环节的功能是给定与调解转子位置的,其环内直接将速度环的设定的设定值作为PID 输出。其反馈信号是根据电机编码器或者最终负载的反馈数据来决定的,需根据实际情况确定。由于速度环的设定作为位置控制环内部的输出,在位置控制模式下,电机控制系统进行了三个闭环的运算过程,此时的系统需要进行的运算量是最大,因此动态响应时间也是最多的,响应速度也是最慢的。总的来说,在整个运行过程中三个模式都会使用到电流环,而电流环作为控制电机运行的基础,在进行速度和位置控制的时候,控制系统实际也在进行电流(转矩)的控制从而配合速度调节和位置调节达到相应控制。
3 仿真和实验结果分析
基于MATLAB 系统上进行SimuLink 建模,对光伏电梯的BLDC 电机进行了三闭环控制系统的仿真,本仿真中电机的转速为1000rad/s,转矩为5N*m,电机从静止转态到稳定运行的时间为0.3s,而在电机运行到0.6s的时候,设置反转信号,让电子仿真系统实现反方向运行。该仿真结果证明了BLDC 可以作为光伏电梯的曳引机,可以实现轿厢上升、下降的速度和轿厢移动距离的精确控制,电机仿真转矩如图4 所示,转速如图5 所示,霍尔传感器相电流反馈信号如图6 所示。
4 结论
通过对光伏电梯的分析,研究了太阳能发电和BLDC 电机的控制系统,并且针对BLDC 电机进行了三闭环控制分析,在Simulink 环境下搭建了电流、转速、转矩三闭环的控制的仿真模型,并且模拟了电机作为电梯曳引机实现上下运行的正反转模式。仿真结果可以表明该系统表现出了优良的稳定动态性,三个控制模块能稳定的通过旋转速度和方向来实现电机位置的调节,该系统几乎无超调,运行稳定性强。
