水面无人艇动态避碰策略研究
2021-04-24张引弦
张引弦
(海军装备部,北京100036)
水面无人艇的英文简称为USV,是一种可以远程操控的水面舰艇,可以代替人去完成危险的海上任务。USV 可执行的非战争任务有侦查、搜索、探测、排雷、搜救、导航和水文地理勘察等;可执行的战争任务有巡逻、反潜作战和海上攻击等。水面无人艇在保证人员安全的情况下可以高效完成危险任务,在军事、民用和科研领域具有光明的发展前景。目前,美国和以色列对水面无人艇的研究技术和成果在全球处于领先地位,其他国家紧跟其后,高度重视对水面无人艇的研发。国内多所大学、公司、研究所投身于水面无人艇的相关行业中,科研人员就USV 动态避障方面的研究已经取得了优异成果。
1 USV 运动环境模型建立
为了避免水面无人艇在海面与动态障碍物相撞,需严格遵循USV 的国际避碰规则公约。在极坐标系下建立运动环境模型,通过计算对具体情况进行分析。
1.1 国际避碰规则公约
国际避碰规则公约是由国际海事组织制订的海上交通规则,目的是为了维护海上交通安全。如图1 所示,海事避碰规则大致可以分为以下三类:
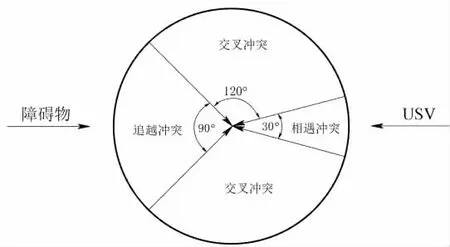
图1 海事避碰规则划分图
1.1.1 对遇冲突:水面无人艇和动态障碍物对遇时,USV 和动态障碍物航向的夹角△θ 满足|180-△θ|<15°,USV 应靠右从动态障碍物的左边行驶。
1.1.2 追越冲突:水面无人艇和动态障碍物追越时,USV 和动态障碍物航向的夹角△θ 满足△θ<45°,USV 应靠左从动态障碍物的左边行驶。
1.1.3 交叉冲突:水面无人艇和动态障碍物交叉时,USV 和动态障碍物航向的夹角△θ 满足45°≤|△θ|≤165°,USV 应从动态障碍物的后方行驶。
1.2 水面无人艇运动环境模型建立和参数计算
通过在直角坐标系中的计算可以得出水面无人艇和动态障碍物之间的相关参数,分析得出USV 的具体操作,达到USV 动态避障的效果。极坐标系和笛卡尔坐标系相对比,可以直观地看出长度和角度,所以USV 的建模一般选用极坐标系。USV 在直角坐标系中的建模如图2 所示。
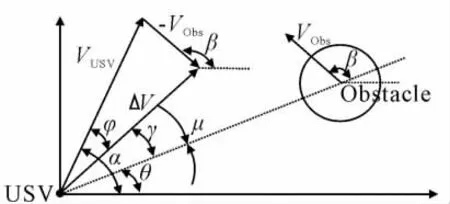
图2 USV 与动态障碍物运动模型
通过相关公式可以计算得出动态障碍物和USV 之间的距离和相对速度,根据两者航向的夹角判断适用于哪一种避碰规则,根据USV 和动态障碍物之间的最近会遇距离和最小会遇时间可以计算得出危险度ρ,ρ 越大,USV 和障碍物之间就越安全。
2 水面无人艇操纵运动模型
建立水面无人艇操纵运动模型,便于研究水面无人艇的操纵运动特性,解决USV 的智能避碰问题。根据USV 的运动状态可以建立三种运动模型,分别是定常运动模型、转向运动模型和变速运动模型。假若这三种运动模型不能起到避碰作用,需要远程控制USV 紧急制动。
2.1 定常运动模型
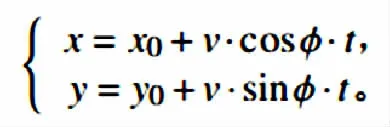
定常运动模型指USV 和动态障碍物的速度和方向保持一定的运动模型。USV 的直角坐标系中的位置假设为(x0,y0),航向为φ,航速为v,可以根据下列公式计算得出经过t 时间后的目标位置。
2.2 转向运动模型
转向运动模型是指USV 保持一定的速度航行,但是航向发生了变化的运动模型。USV 的直角坐标系中的位置假设为(x0,y0),航向为φ(t),航速为v,可以根据下列公式计算得出经过t 时间后的目标位置。要想得到φ(t)的值需要掌握操控性指数、操控角、时刻和掌舵时间等参数。
2.3 变速运动模型
变速运动模型是指航向改变无法避免碰撞的情况下,采用变速的运动模型。如下列公式所示,需要掌握USV 的变速前的速度、最终速度、前进方向的虚质量、USV 的质量和阻力系数等参数。

3 水面无人艇导航与控制关键算法
实现水面无人艇导航和控制系统的关键是采用全局航线规划算法和局部避碰算法。
3.1 全局航线规划算法
导航是水面无人艇的重要系统,可以实现USV 全局路线避碰。导航系统需要对USV 的航线进行规划,根据环境设计出一条无碰撞的最优路径。
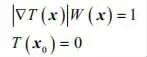
赛斯詹姆斯于1995 年提出了快速行进法,是可以对界面传播快速求解的水平集方法。此方法可以根据USV 速度和位置的变化,快速对时间求解,现已被应用在图象自动处理和航线规划等多个领域。如下列公式所示,对波浪在网格空间迭代传播的过程进行模拟,求解全局最小点的连续长度,经过梯度下降规划最优路径。
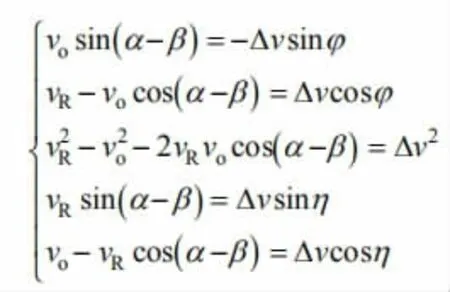
3.2 局部碰壁算法
水面无人艇智能导航系统实现的另一个关键是局部避碰技术,适用于处理全局航线规划算法规划的合理路线上的意外情况。雷达、定位系统等设备可以实时对水面上的情况进行监测,如果发现动态障碍物,局部碰壁算法可以实现自动避碰。此算法会因传感器的监测范围受到限制,而且对于精度的要求极高。本文采用经典的VO算法实现水面无人艇的自动避碰,根据以下公式,由USV 和动态障碍物的相对位置和速度构造出一个锥形的速度障碍区域,可以快速、有效、灵活地实现USV 自动避障。
4 仿真试验与结果
为了验证水面无人艇动态避碰策略的可行性,以Matlab2010 软件为工具分别对三种碰撞事件进行仿真实验。图中的黑色长线表示动态障碍物,浅色部分代表USV 及其航线的变动方向。在Matlab2010 软件中生成代表USV 和动态障碍物的线条。记录USV 和障碍物的初始位置。根据具体情况选择相应的运动模型,通过算法实现无人艇的智能化避障。当USV 前行时发现前方出现动态障碍物,可以实现自动避碰。图3 为对遇局面、交叉局面和追越局面动态智能避碰仿真图。

图3 对遇局面、交叉局面和追越局面动态智能避碰仿真图
5 结论与展望
水面无人艇具有快速灵活、安全高效等诸多优势,在未来海上领域具有光明的前景。其技术实现不仅为军用、民用提供了巨大便利,也代表了一个国家的科技水平和军事水平。本文对于水面无人艇动态避碰策略的研究,意在为日后水面无人艇的发展提供借鉴。基于国际避碰规则公约采用了极坐标系对水面无人艇的运动环境进行建模,描述了三种水面无人艇的运动模型,选择快速行进法和VO算法分别实现了全局航线规划和局部碰壁。使用Matlab2010 分别对三种USV 运动模型进行仿真实验,验证水面无人艇导航与控制系统实现自动避碰的可行性,得到水面无人艇可以完成基本的航线规划和自主避障任务的结果。
