倾斜摄影空中三角测量结果若干优化方法
2021-04-23吴献文
吴献文
(广东工贸职业技术学院, 广州 510510)
0 引言
倾斜摄影测量技术作为一项新兴的测绘新技术, 在各领域中得到了普及[1-2], 其三维重建有五个关键技术流程组成, 分别是影像特征点提取与匹配、 空中三角测量[3-4](简称空三)、 密集点云匹配、 三角网构建和纹理映射[3]。 参与过倾斜摄影测量项目的人都深有体会, 在外业数据采集顺利的前提下, 项目生产真正的痛点主要在内业数据处理。 内业数据处理又以空三解算为核心[5]。 空三解算是三维重建的重中之重, 但很多技术人员在实际作业生产中, 只关注数据采集的硬件设备而忽视了数据处理。 作业过程中航拍效率很高, 但是由于数据处理速度低, 庞大影像数据积压, 整体效率偏低, 导致项目进展极为缓慢。
空三解算存在的主要问题是: 在花费大量时间运算后, 结果出现断裂、 分层交叉、 弯曲等现象, 这要花费技术人员大量精力进行人工干预。甚至人工干预不成功的, 直接导致空三解算失败,浪费全部时间与精力。 降低空三结果断裂、 分层交叉、 弯曲产生的概率, 可以节约大量时间, 降低生产成本。 针对这个目标, 可以从空三技术流程出发, 对相机畸变、 影像姿态与色差、 像控点布设、 连接点选择等方面进行分析, 找出倾斜摄影空三结果的优化方法。
1 倾斜摄影空三技术流程
倾斜摄影空三技术流程主要包括: 建立影像拓扑关系、 影像特征点提取、 影像匹配、 光束法区域网平差, 最后输出空三结果[6]。
1.1 建立影像拓扑关系
倾斜摄影可以获取垂直、 前视、 后视、 左视及右视五组影像[7], 除垂直影像外, 其它四组影像都为倾斜影像, 所有影像都对应有POS(Position and Orientation System)定位数据, 可提供近似的影像外方位元素[8], 从而建立影像间的相对位置关系[9],自动重构倾斜影像航带[10]。
1.2 影像特征点提取
由于SIFT 算子对于倾斜影像特征提取具有较好的重复率, 所以影像特征点提取一般采用 SIFT算子。 在提取计算之前, 需加入相机畸变参数、影像色差等影响因素, 有利于准确快速进行特征提取。
1.3 影像匹配
影像匹配实质是如何准确快速获取多视倾斜影像的同名点坐标, 从而获取地物三维特征信息,形成点云数据[11]。 倾斜影像匹配一般采用基于特征的影像匹配算法, 算法的数学模型多数采用适用于倾斜影像的多视最小二乘法。
1.4 光束法区域网平差
采用POS 辅助的方法进行平差, 以像控点坐标、 像点坐标、 GNSS 摄站坐标和IMU 姿态角为观测值[5], 以物点地面坐标、 影像外方位元素以及各种系统误差改正参数为待定参数[12]。 按照像控点坐标、 像点坐标、 POS 系统提供的GNSS 摄站坐标及IMU 姿态角的测量精度[12], 分别给予观测值不同的权, 利用最小二乘平差法求解物点的三维地面坐标和影像外方位元素的最或然值[12-13]。
2 空三相关因素分析与优化方法
从倾斜摄影测量的空三技术流程可以得出,算法涉及相机畸变参数、 影像姿态与色差、 像控点布设、 连接点选择等方面。 在实际生产中, 采用的三维重建软件众多, 不同的三维重建软件采用的算法往往不太一样, 但是大多数算法基本参考经典算法, 或者在其基础上拓展创新。 从算法原理角度分析, 可以推测出空三结果出错或是无法成功的因素可能来以下几个方面。
2.1 光照变化与相机畸变影响
多数三维重建软件的空三算法都对光照变化反应灵敏。 同一测区, 在不同时段航拍的影像,因气象条件、 光照变化等因素的影响导致影像存在色差时, 会导致空三解算过程影像特征匹配不稳定, 导致空三解算失败。 相机畸变也可以导致空三解算过程影像匹配不准确, 导致空三结果弯曲。
优化方法: 在导入影像后, 设置每一相机的畸变参数。 根据高度不同而分开空三解算, 另外也要考虑拍摄时间过长导致拍照时有阴天晴天等差别, 如果色差明显必须区分开来, 定义到不同的组别里。 空三运算的第一步就是解算同名点,即匹配多张照片中同一物体的位置信息。 像田地、海水等纹理不明显的物体来说, 解算同名点比较困难, 需要在边界处人为多测设一些像控点。 另外如果结果显示的模型大小形状基本匹配, 而只是方向倾斜的话, 可以在空三解算前另外定义几个连接点来控制方向。
2.2 影像数据分块影响
倾斜影像数据量往往比一般正射数据量大很多倍, 我们常用的三维重建软件进行空三处理海量数据时, 为了提高生产的效率, 采用对数据进行分块、 逐块空三解算、 最后再合并解算的策略,但是多数软件的空三合并功能的稳定度仍有待提高, 并且进行并行空三解算时, 只处理影像特征点提取及匹配, 未有效对自由网构建进行并行化处理, 最终导致块合并后的空三结果出现问题。
优化方法: 选择多次重复空三解算, 反复调整参数, 或者在块与块衔接处人工添加有效连接点, 或者在块与块衔接处增加像控点数量等, 从而得到比较合适的结果。
2.3 POS 定位数据精度影响
有些软件的空三解算区域网平差未有效利用影像的POS 定位数据。 航空摄影时, POS 定位数据中的GNSS 位置存在航带分布的系统误差, 称为航带误差。 在经典的GNSS 辅助平差时, 往往需要对航带误差进行改正, 如果软件没有进行此处理,故往往无法获得高精度平差结果。 另外, 进行航带改正的另一个优势是当控制点的坐标系和GNSS的坐标系不相同时(如分别为2000 国家大地坐标系和WGS84 坐标系时), 可以通过平差改正, 使控制点的坐标系和GNSS 的坐标系趋近一致。 如果航带信息不能够有效利用, 可能会导致空三结果出现严重的分层交叉。
优化方法: 选择相关软件的空三解算功能,解算初始空三结果, 将空三结果作为POS 初值导入三维重建软件中, 再次进行空三解算, 有效提高空三成功率, 得到合适空三结果。
3 实例验证
本验证实例为某大学粤东校区规划实景三维模型与1: 500 地形图生产项目, 面积约 12 km2,该区域相对平坦, 但水域分布较多, 交通不便,航飞时间跨越两天, 采用五拼倾斜相机, 共飞5架次, 获取影像26 万多张。 三维重建采用Context Capture 软件解算。 为了验证需要, 解算数据分为整体解算、 按架次分别解算再合并、 人为分区解算再合并等方式, 并且对相机畸变参数、 像控点、连接点等因素根据解算需要进行调整。 经过解算,出现断裂、 分层交叉、 弯曲等空三结果, 经过调整参数、 人工干预等优化方法, 空三结果表现正常。
3.1 空三结果断裂优化处理
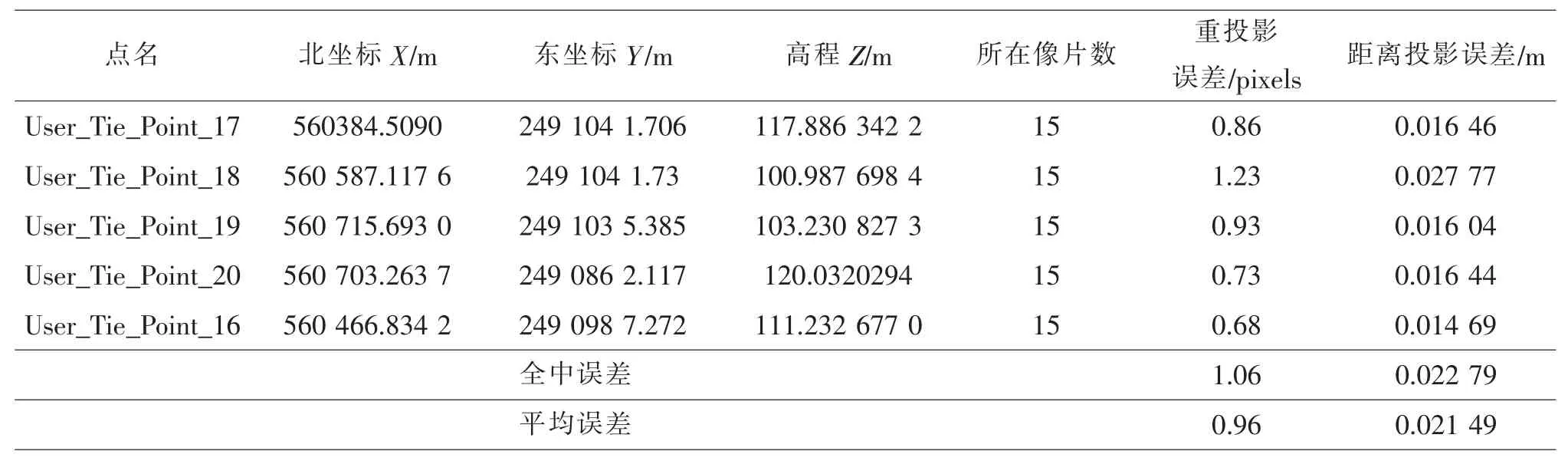
空三结果出现断裂的情况, 如图1 所示。 这种情况一般是光照变化影响, 通过对不同时间段拍摄的影像进行分组, 并且人工干预增加连接点,在进一步空三解算, 结果成功, 连接点空三解算情况见表1, 结果如图2 所示。 最佳的优化方法是采用具有消除色差的倾斜相机, 精心规划飞行时间, 减少光照变化。
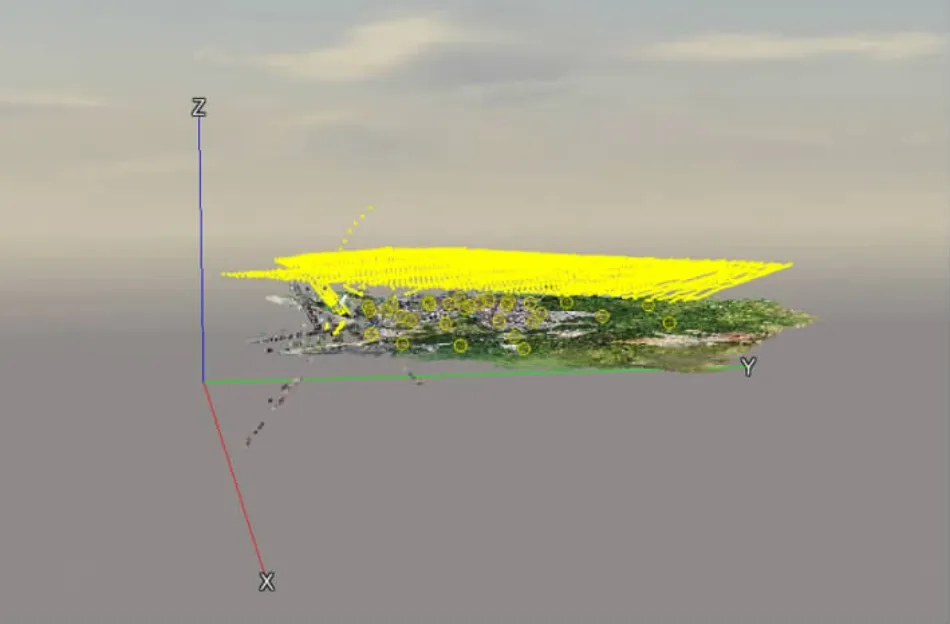
图1 空三结果断裂示意图Fig.1 Fracture diagram of aerial triangulation result

图2 断裂经过优化处理后结果示意图Fig.2 Diagram of fracture after optimization
3.2 空三结果分层交叉优化处理
空三结果出现分层交叉情况, 如图3 所示。出现这种情况一般是任意模式、 不加入约束条件下的空三解算结果, 优化处理的办法是加入POS数据、 像控点并量测, 再次进行空三解算, 如果还不理想, 人工干预加入连接点, 再一次空三解算, 一般可以取得合适结果, 人工连接点空三解算情况见表2, 结果如图4 所示。
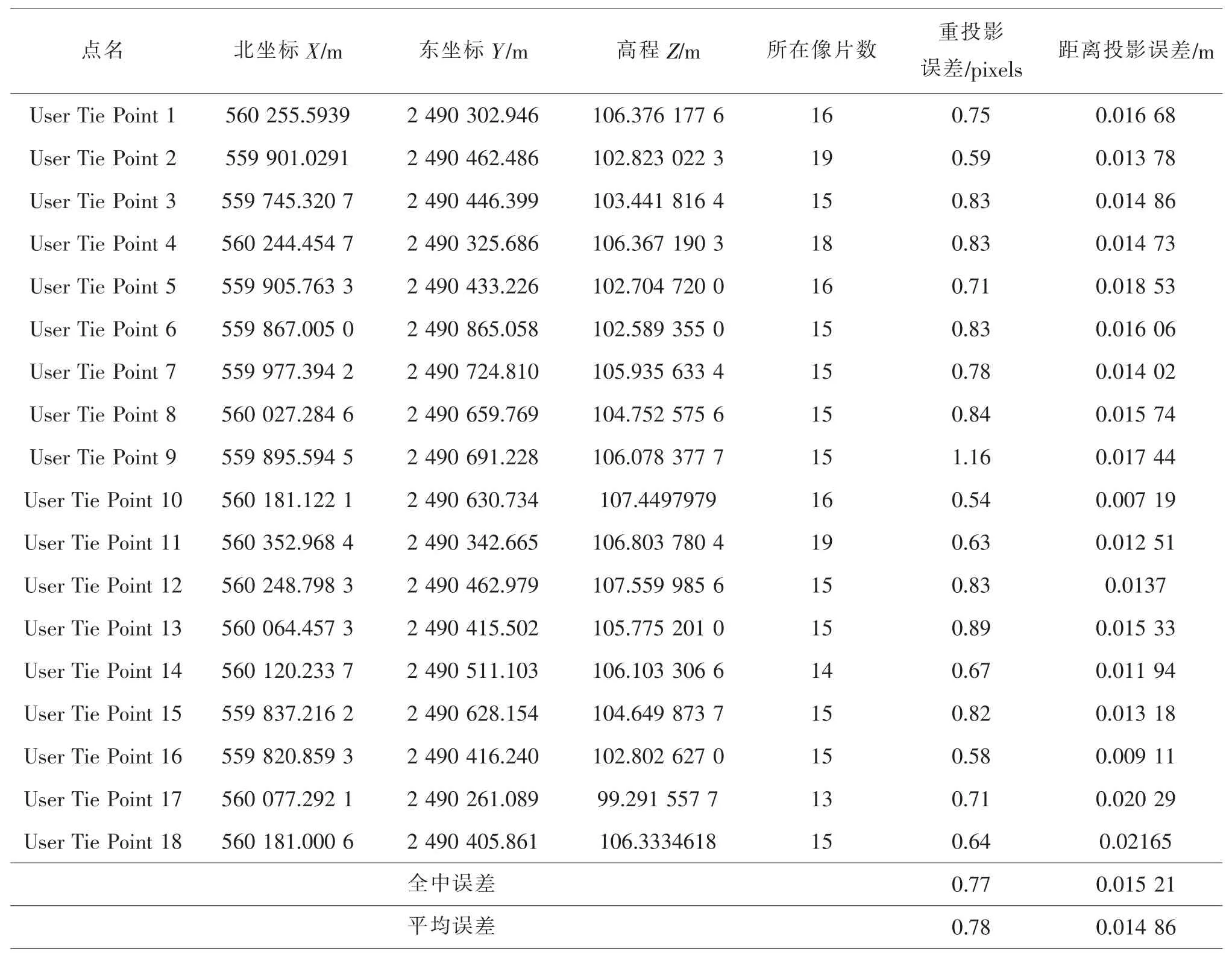
表1 空三结果出现断裂人工加入连接点后数据处理情况Table 1 Data processing status after manually joining connection points when fracture appeared in aerial triangulation result

表2 空三结果出现分层交叉人工加入连接点后数据处理情况Table 2 Data processing status after manually joining connection points when overlap stratification appeared in aerial triangulation result

点名 北坐标X/m 东坐标Y/m 高程Z/m 所在像片数 重投影误差/pixels 距离投影误差/m User Tie Point 13 560 603.690 2 249 037 3.445 106.071 535 8 15 0.86 0.016 53 User Tie Point 14 560 664.502 8 249 042 6.702 108.408 312 6 15 1.2 0.020 51 User Tie Point 15 560 726.481 9 249 043 3.407 112.383 863 3 16 0.63 0.013 47全中误差 0.92 0.016 02平均中误差 0.88 0.015 17

图3 空三结果分层交叉示意图Fig.3 Diagram of overlap stratification of aerial triangulation result

图4 分层交叉经过优化处理结果示意图Fig.4 Diagram of overlap stratification after optimization
3.3 空三结果弯曲优化处理
在空三解算前加入像控点、 POS 数据、 相机畸变参数等要素, 但还是出现空三结果弯曲情况,如图5 所示。 一般出现这种情况下主要存在影像重叠率不够大、 边缘像控点数量不够、 关键点密度低等因素, 解决这些因素并人工干预加入连接点, 增加连接点之后空三结果都能得到基本优化,得到正确结果, 人工连接点空三解算情况见表3,结果如图6 所示。
3.4 空三结果水域接壤处分层优化处理
如图7 所示, 空三解算如果遇到了大面积水域情况, 将不能自动匹配同名点, 这时候需要人工干预加入数量较多的正确连接点, 确保水域两边有足够多的同名点。 人工连接点空三解算情况见表4, 结果优化处理如图8 所示。 如果测区水域面积比较大, 或许水域分布较多, 要从航飞摄影上解决一些问题, 例如, 精心规划航线, 避开大面积水域, 加大影像重叠率等。
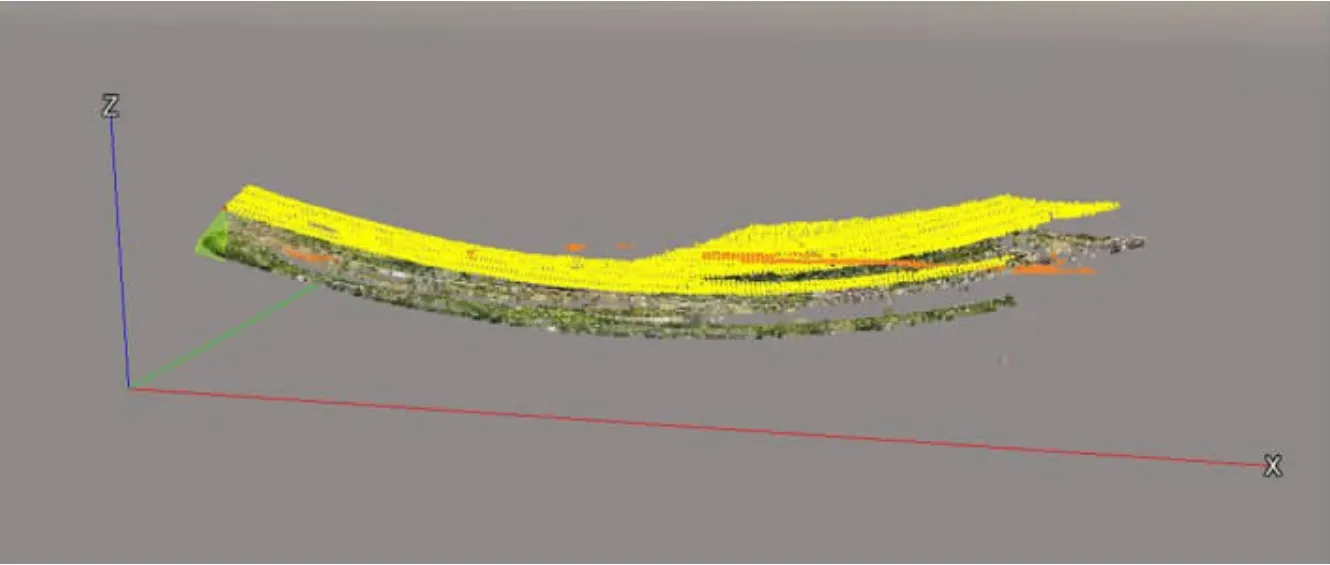
图5 空三结果弯曲示意图Fig.5 Diagram of aerial triangulation result bending
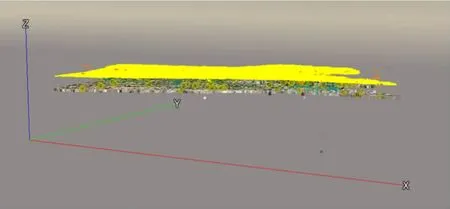
图6 弯曲经过优化处理结果示意图Fig.6 Diagram of bending after optimization

表3 空三结果出现弯曲人工加入连接点后数据处理情况Table 3 Data processing status after manually joining connection points when bending appeared in aerial triangulation result
点名 北坐标X/m 东坐标Y/m 高程Z/m 所在像片数 重投影误差/pixels 距离投影误差/m User_Tie_Point_17 560384.5090 249 104 1.706 117.886 342 2 15 0.86 0.016 46 User_Tie_Point_18 560 587.117 6 249 104 1.73 100.987 698 4 15 1.23 0.027 77 User_Tie_Point_19 560 715.693 0 249 103 5.385 103.230 827 3 15 0.93 0.016 04 User_Tie_Point_20 560 703.263 7 249 086 2.117 120.0320294 15 0.73 0.016 44 User_Tie_Point_16 560 466.834 2 249 098 7.272 111.232 677 0 15 0.68 0.014 69全中误差 1.06 0.022 79平均误差 0.96 0.021 49
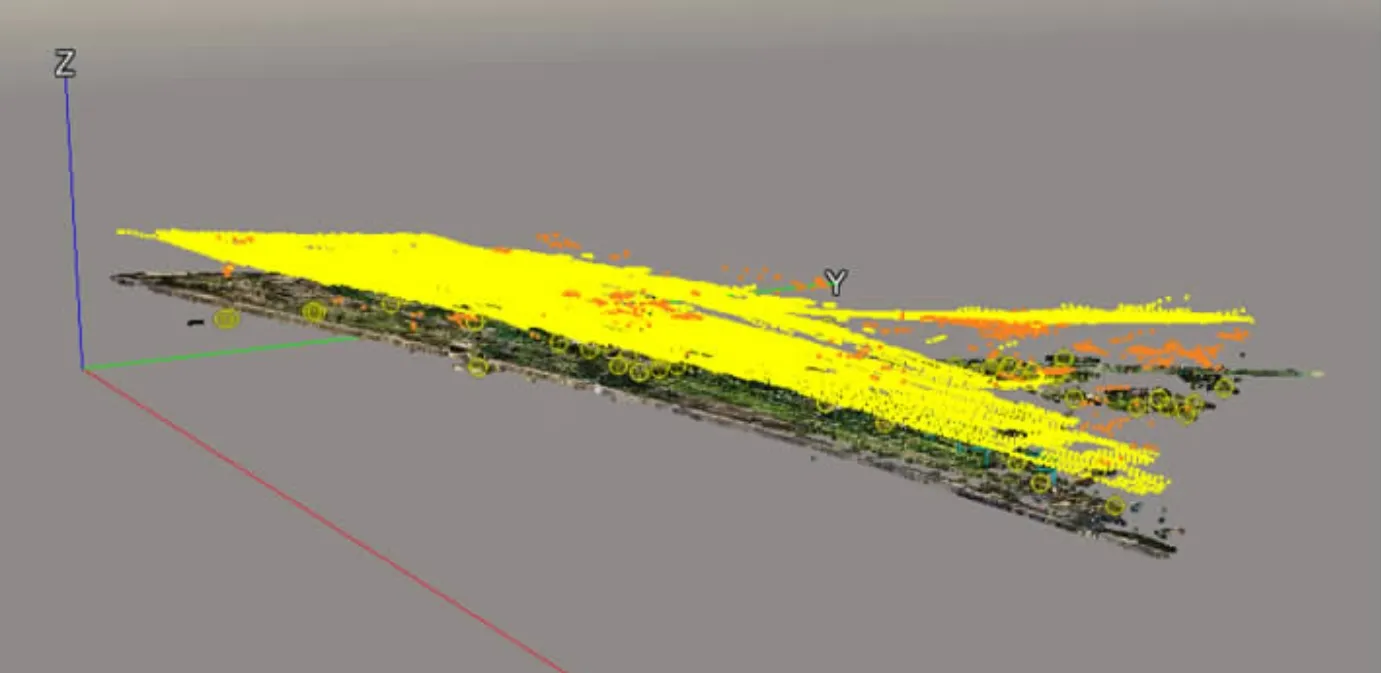
图7 空三结果水域接壤处交叉示意图Fig.7 Diagram of intersection at the intersection of water boundary of aerial triangulation result
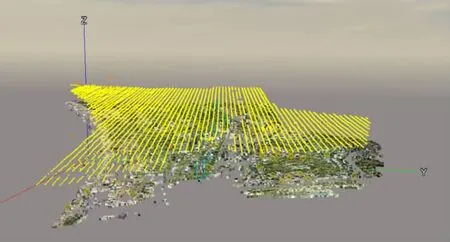
图8 水域接壤处交叉经过优化处理结果示意图Fig.8 Diagram of optimization result at the intersection of water boundary
4 结论
在倾斜摄影测量中空三解算非常复杂, 经常出现意想不到的问题, 通过以上的若干优化操作。一定程度提高空三解算成功率, 减少失败的次数,对能够提高三维重建生产效率有积极意义。
为了让数据生产更加优化, 达到更好更快的效果, 必须配备精良的硬件设备, 精心规划航线,提高像控点精度与密度, 同时需要多种不同类型软件搭配使用, 找到最优的生产技术路线。 随着倾斜摄影的普及, 出现越来越多的与处理倾斜影像相关的软件, 但是, 三维重建软件要注重优化倾斜摄影测量空三算法, 才能从根本上解决空三解算复杂问题, 希望上述若干优化方法对优化空三算法具有借鉴意义。
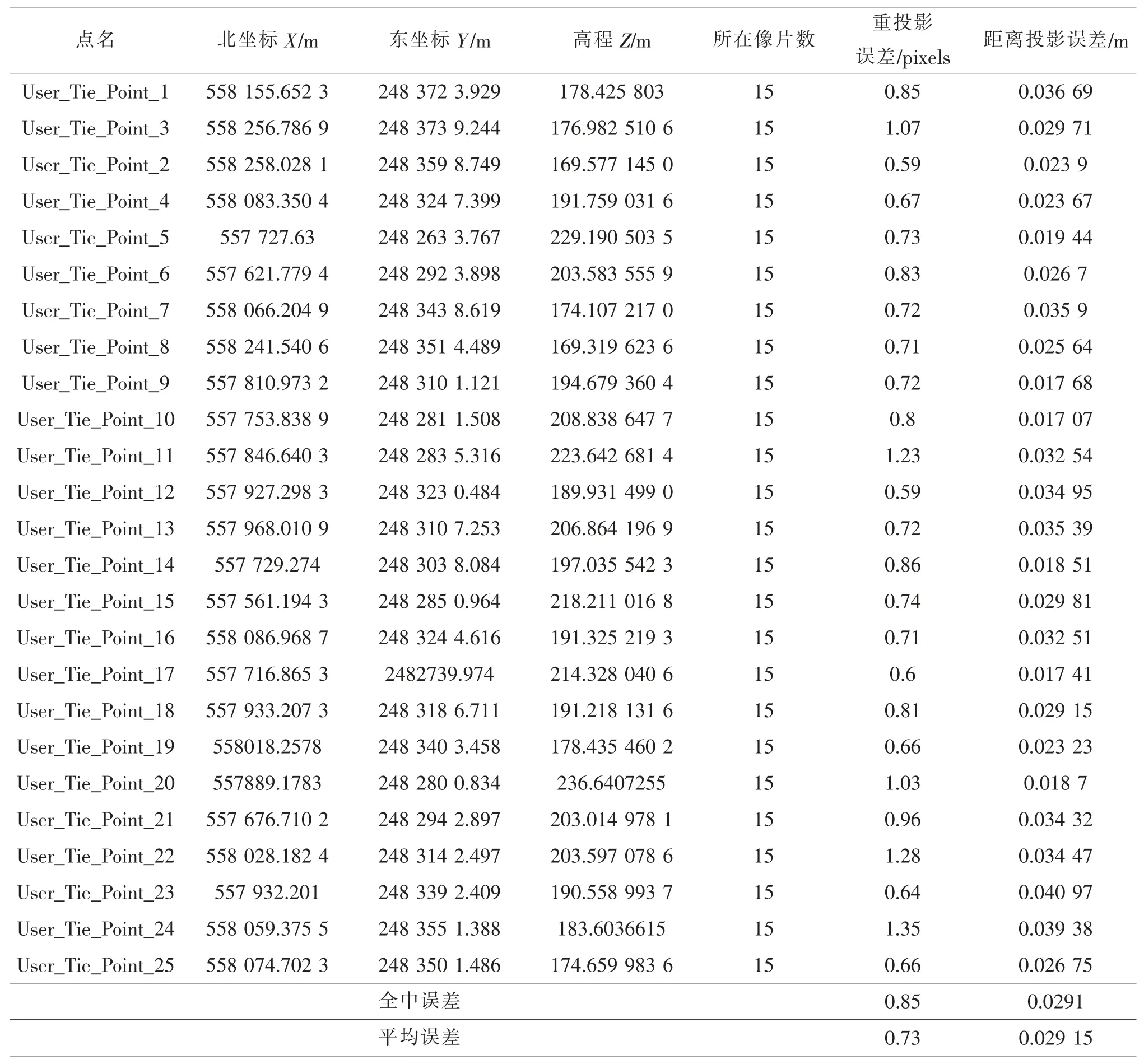
表4 空三结果出现水域接壤处分层人工加入连接点后数据处理情况Table 4 Data processing status after manually joining connection points when stratification appeared at water boundary in aerial triangulation result
