基于合并短线段的直线检测方法
2021-04-23于水源
冯 凯,王 琦,于水源
(1.中国传媒大学计算机与网络空间安全学院;2.智能融媒体教育部重点实验室,北京 100024)
0 引言
直线检测一直是计算机视觉领域的研究热点之一。在图像中,直线段属于底层的图像特征,基于直线段的长度、方向和端点检测都能提取出重要而基本的图像信息。在许多计算机视觉任务中都能看到直线检测的影子,如道路检测[1]、消失点检测[2-3]、即时定位与地图构建[4-5]及三维重建[6]等。曲线在人们的日常生活中也随处可见,通过曲线检测能够获取图像中物体的轮廓信息,因此曲线检测与直线检测一样具有较高的研究价值。
目前直线检测已取得了许多研究成果,主要包括边缘连接法和梯度法。霍夫变换算法属于边缘连接法,以其优良的检测能力得到了广泛应用[7]。近年来也有针对霍夫变换的改进算法,包括霍夫一维变换[8]、随机霍夫变换[9]、概率霍夫变换法[10-11]和网格霍夫变换[12]等。但是霍夫变换依然存在针对复杂图像检测性能不佳、容易误检和漏检直线等问题。CannyLines 方法[13]也是边缘连接法中的经典方法,其能够根据图像自适应调整参数,且易于检测低梯度区域,却过滤了一些真实的短线段。梯度法的主流算法包括以下几种:LSD 方法[14]能够有效区别相邻线段,但容易产生过分割的情况;Linelet 方法[15]易于检测细小的纹理信息,但存在运行速度慢、易出现孤立的短线段等缺点。
在曲线段检测方面,目前工业界最常用的还是霍夫变换算法,霍夫变换可根据给定的解析式检测特定曲线(如圆或椭圆),而之后提出的广义霍夫变换[16]可以不需要解析式检测任意给定的曲线。
目前很大一部分线段检测方法都依赖于边缘检测,包括霍夫变换法、EDLines 方法和CannyLines 方法等。Canny算子是目前边缘检测的主流算法之一,其基本思想是找到像素灰度值变化明显的地方作为边缘点。孤立的边缘点可聚集成直线段,再采用某种拟合方法检测直线段即可提取出直线。由此可见,在基于边缘的直线检测方法中,边缘检测算法的优劣将直接影响直线检测效果。
综上,直线检测领域还没有一种通用的高性能方法,只能根据不同情况选择不同方法。优秀的直线检测方法应尽可能避免直线断裂,有较高精度且满足速度要求[17]。为此,本文提出一种基于合并短线段的直线检测方法。实验结果表明,该方法在检测精度和速度方面均表现较好,且该方法既能够检测边缘图中的直线段,也能够检测曲线段。
1 直线检测算法
通常来说,在一张图片中找到所有线段需要较大的计算量,尤其在图片分辨率很高的情况下更是如此。如果将图片切割成多个小矩形框,每个小矩形框中的线段不难检测,再将各矩形框中的短线段合并成直线。当短线段的长度足够短时,即可用来近似曲线段,这种采用逐次近似思想拟合曲线的方式通常被称为“直线简化”。对于直线段检测,该方法最后会输出直线段的两个端点坐标;对于曲线段检测,该方法会输出曲线段上的多个点坐标。
本文方法基本步骤如下:①将图像边缘图切分成若干区域;②通过若干个匹配矩阵检测短线段;③将所有短线段合并成直线或曲线;④探测并补全断裂的线段。
1.1 将图像边缘图切分成若干区域
为了提高算法运行效率与检测精度,对于偏向水平的线段和偏向竖直的线段分开进行检测处理。
(1)针对偏向水平的线段,将边缘图(见图1(a))从左到右切分成若干区域(见图1(b)),也即从左到右设置若干个检测框进行检测。每个检测框的宽度可设置不同数值,该宽度越小,检测到的线段越精细,也能够显示更多细节,图1 中的宽度为8 个像素。
(2)针对偏向竖直的线段,在边缘图中从上到下设置若干个检测框(见图1(c))。
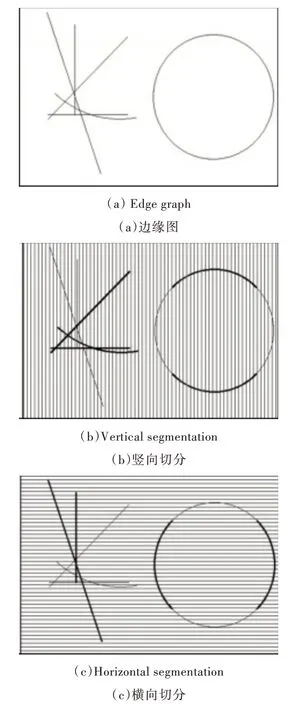
Fig.1 Image segmentation图1 切分图像
这种针对水平和竖直两个方向分别进行处理的思想在Sobel 算子[18]中也能够看到。Sobel 算子包含两组矩阵模板,分别用来检测水平方向和竖直方向的边缘。
1.2 通过若干匹配矩阵检测短线段
通过若干矩阵检测短线段可分为以下几个步骤:
(1)针对寻找检测框中的短线段,本文以其中一个检测框(见图2(a))为例进行说明。首先记录原图中直线与检测框边界的交点,左右两个交点确定一条直线,图2(a)检测框的左边界检测到4 个交点,右边界检测到4 个交点,即可确定16 条短线段(见图2(b))。
(2)如果左右两点纵坐标的差大于检测框宽度,则是一条倾向于竖直的直线,剔除该短线段。在这一步能够排除大部分短线段,上一步的16 条短线段经过这一步只剩下5 条可能的短线段(见图2(c)),减少了很多后续计算量。
(3)目前需要判断上一步的5 条短线段在原始图像中是否存在。具体方法如下:预先构造一个字典Map,字典中包含15 个短线段匹配矩阵,即图3 中的15 幅短线段匹配二值图。已知倾向水平短线段的左右端点坐标,即可在原图像中框选需要检测的短线段区域,得到矩阵M1(图2 中框选部分)。将短线段左右端点的纵坐标之差作为键,从字典Map中取得一个短线段匹配矩阵M2(图3 中框选部分)。将矩阵M1与矩阵M2点乘,得到结果矩阵M3。计算矩阵M3的各元素和Sum。如果Sum大于一个阈值,则可认为假设的短线段在原图中存在。剔除Sum小于该阈值的短线段后得到3 条短线段(见图2(d)),即该检测框检测到了3 条水平短线段。
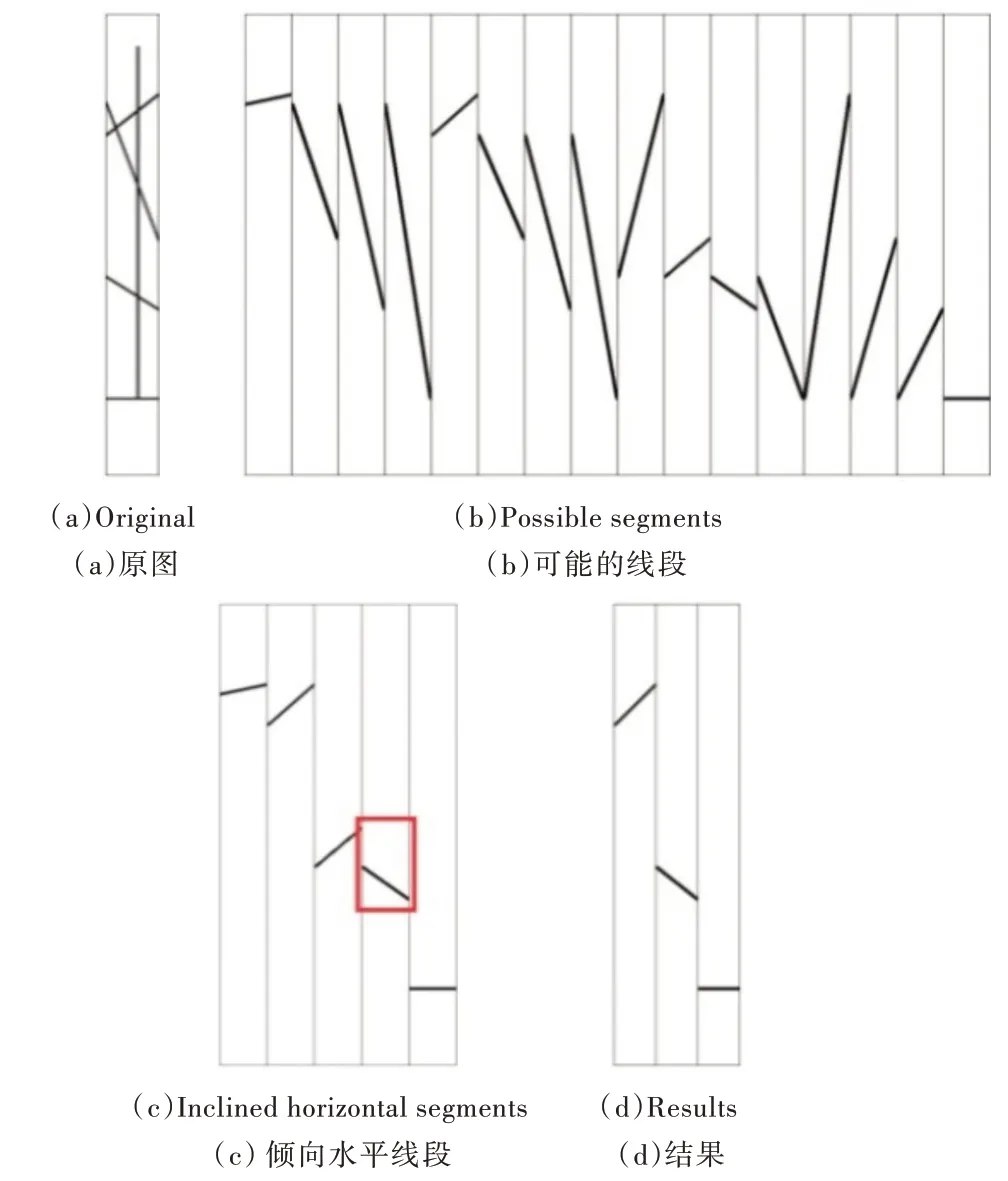
Fig.2 Short line detection图2 探测短线段

Fig.3 Binary graph matching short line segments图3 匹配短线段二值图
1.3 合并检测框中的短线段得到直线
之前检测到的短线段是零散的,每一条直线的各个短线段分散在不同检测框中,需要将其合并起来得到一条直线。例如图4(b)中的直线由4 条短线段组成,它们分别被4 个检测框探测到,即图4(a),下面是合并思路:从左向右遍历未标记的短线段,以当前短线段L1第二个交点的纵坐标为索引值,在下一个检测框的短线段集合中寻找下一条短线段L2。当短线段L1与短线段L2的角度差小于1 时,两条短线段可合并为一条直线。当两条短线段角度差大于1且小于30 时,两条短线段可合并为一条曲线。
1.4 探测并补全断裂的线段
由于本方法将偏向水平和偏向竖直的线段分开进行检测,在进行曲线检测时,那些倾角在45°和135°附近的线段会断裂,例如图1(b)、(c)中的圆被划分为4 段曲线。因此,需要在线段端点附近寻找断裂的线段,具体思想如下:图5(a)中的L0为原曲线,图5(b)为短线段合并后的线段,其中L1与L2之间是断裂的,R5为L1所在方格,R2为L2所在方格,需要在R5的八邻域方格内寻找与L1相连的线段L2,判断图5(c)中的虚线是否为断裂线段的方法为1.2 节中步骤(3)中的方法。图5(d)表示通过逐次近似的方法拟合图5(a)中曲线后的效果。

Fig.4 Merging short segments图4 合并短线段

Fig.5 Line segment for detecting fracture图5 断裂线段探测
2 实验
2.1 实验设计
考虑到本文算法既能检测边缘图中的直线,又能检测曲线,针对这两种情况应设计不同实验进行分析。
为了验证本算法检测边缘图中直线的效果,本文采用案例检验和客观评测系统两种评测方法进行测试。首先选取两幅图像进行案例检验,分别是Lenna 图和五角大楼。为了验证该算法检测边缘图中直线的效果,本文还将其与霍夫变换算法和LSD 算法进行比较。
案例检验属于定性分析,对于复杂图像,很难仅通过视觉感知对检测结果进行比较[19],而客观评测系统将使用York 城市数据库[20]评测本文算法,属于定量评测方法。York 城市数据库是一个包含102 张原始图像的数据库,而且每张图像都人工标注了图像中直线段的相关信息(包括直线段端点坐标)。之后Cho 等[15]花费大量时间对该数据库进行了详细的标注工作,能够较为客观地评价直线检测算法效果。评价一条直线是否被正确检测的标准如下:对于人工标注的直线段加粗一个像素进行处理(加粗一个像素表示可容忍的检测误差为一个像素),然后判断检测的直线段是否在该该加粗的直线段内,判断方法为1.2 节步骤(3)中的方法。由此可得到正确检测的直线,继而计算出误检和漏检的直线段。
对于曲线检测,本文采用案例检验方法进行评测,选取两幅图像处理领域的经典标准图片进行检验,分别为水果和帆船。
2.2 实验分析
2.2.1 直线检测(使用案例检验测试)
图6 为Lenna 图与五角大楼图(彩图扫OSID 码可见),为了更清晰地观察到结果,在原图中截取了一部分作为局部放大图,分别在图中的第2 列和第4 列。其中图6(a)为原图,图6(b)为预处理后的边缘图,图6(c)为采用本文算法检测的结果,图6(d)为采用霍夫变换算法检测的结果,图6(e)为采用LSD 算法检测的结果。表1、表2 为不同结果的对比。

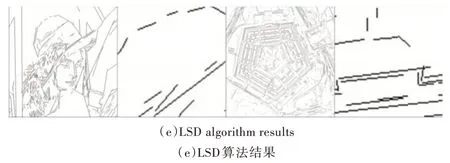
Fig.6 Effect Comparison of different methods图6 不同方法效果对比
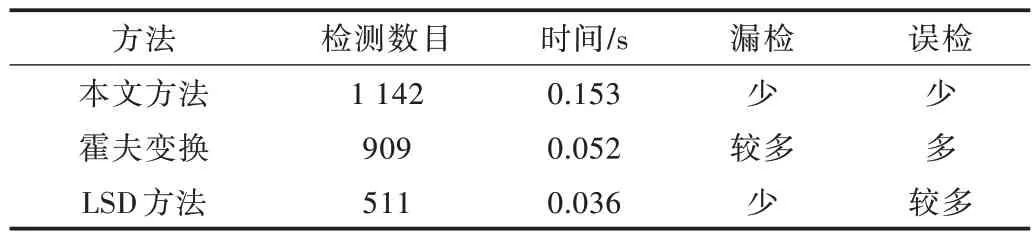
Table 1 Comparison of different results of detecting the lines in the left figure of Fig.6(a)表1 图6(a)左图中的直线检测结果对比
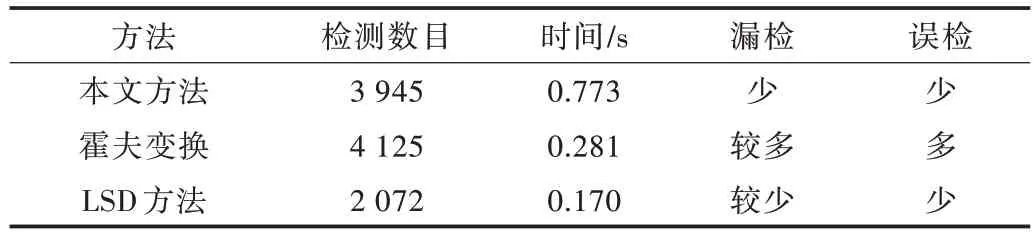
Table 2 Comparison of different results of detecting the straight line in the right figure of figure 6(a)表2 图6(a)右图中的直线检测结果对比
比较本文方法与其他方法的检测结果,从图6 中可观察到,霍夫变换在图像边缘密集(比如纹理)情况下的直线检测效果并不好,常常是错误而杂乱的,具体表现在Lenna的头发和眼睛上。霍夫变换还存在很多漏检的直线,比如Lenna 的帽子边缘没有被检测到,从图6 中五角大楼的局部放大图也可看出霍夫变换算法误检了许多短线段。LSD 算法的检测效果不太稳定,在Lenna 图中,可明显看到在帽顶处漏检了一些直线段,由此造成图像主体边缘的不连续,同时对于五角大楼局部放大图中的停车场也漏检了许多短线段。由表1、表2 可知,相比霍夫变换算法和LSD 算法,本文方法误检和漏检的情况较少。
2.2.2 直线检测(使用客观评测系统测试)
图7(a)为York 城市数据库中的一张原图像,图7(b)为边缘图像,图7(c)为人工标注的直线段图像。从图7(d)中可以看到,霍夫变换方法得到的直线段在图像中某些区域堆积在了一起,尤其是短线段。从图7(e)中可以看到,LSD 方法存在明显的误检直线,例如图上方1/6 处有一条斜线被误检成了水平线。图7(f)为本文方法检测结果,相比霍夫变换方法,本文方法不会在线段密集部分误检率较高,也不会像LSD 方法那样出现明显错误。

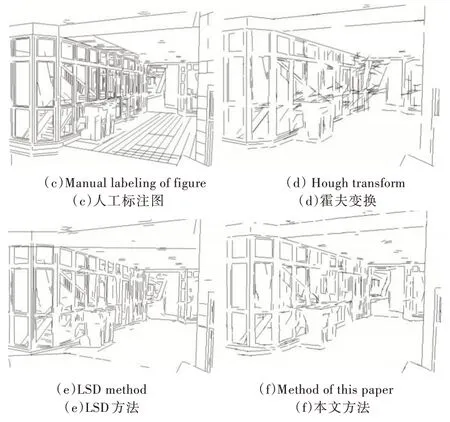
Fig.7 Detection effects of different methods图7 不同方法检测效果
在Youk 城市数据库中,平均每张图片有680 条标注线段,102 张图片的直线段总长度约为3 475 980 个像素。令TP为真阳性(正确检测直线长度和),FP为假阳性(误检直线长度和),FN为假阴性(漏检直线长度和),本文将根据以下4 个指标对不同方法进行评估:
(1)精度。即正确检测直线占检测到所有直线的比率,计算方法如下:

(2)召回率。即正确检测直线占人工标注直线的比率,计算方法如下:

(3)IoU。即正确检测直线与人工标注直线的交集比上它们的并集,计算方法如下:

(4)F值。即精度和召回率的调和平均数,本文设F 值中的β 值为1,计算方法如下:

根据表3 能从整体角度分析不同方法的检测效果,可以看出本文方法的检测精度高于霍夫变换方法和LSD 方法,而召回率、IoU和F值更是远高于其他两种方法,说明本文方法的检测效果优于传统主流方法。
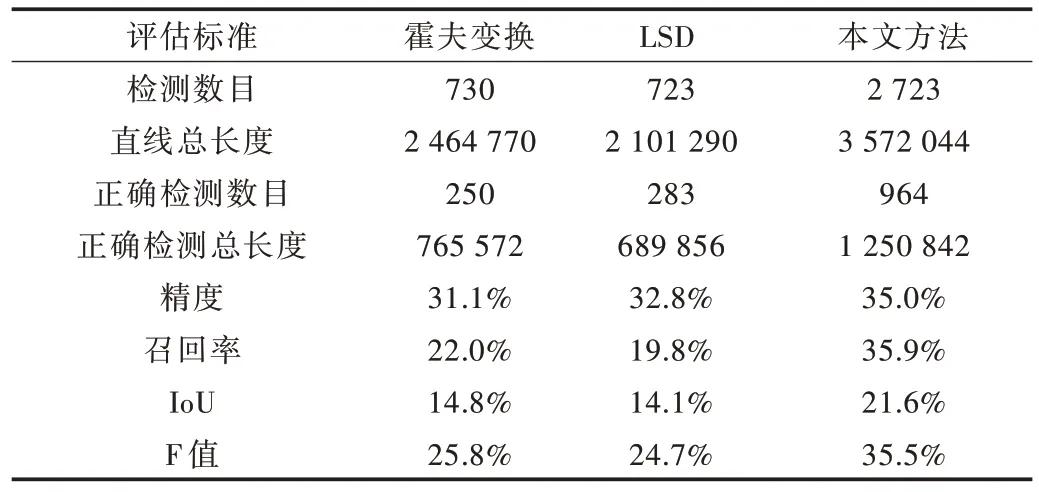
Table 3 Evaluation results of line segment detected by different methods表3 不同方法检测直线段评估结果
2.2.3 曲线检测
图8 为水果和帆船(彩图扫OSID 码可见),其中第2 列与第4 列为局部放大图。图8(a)为原图,图8(b)为边缘图,图8(c)为采用本文算法检测的结果。
从图8、表4 中可以看出,本文方法检测曲线的效果也较好,采用本文方法可以检测任意形状的曲线,而传统方法需要通过曲线解析式检测曲线,本文方法突破了这一局限。
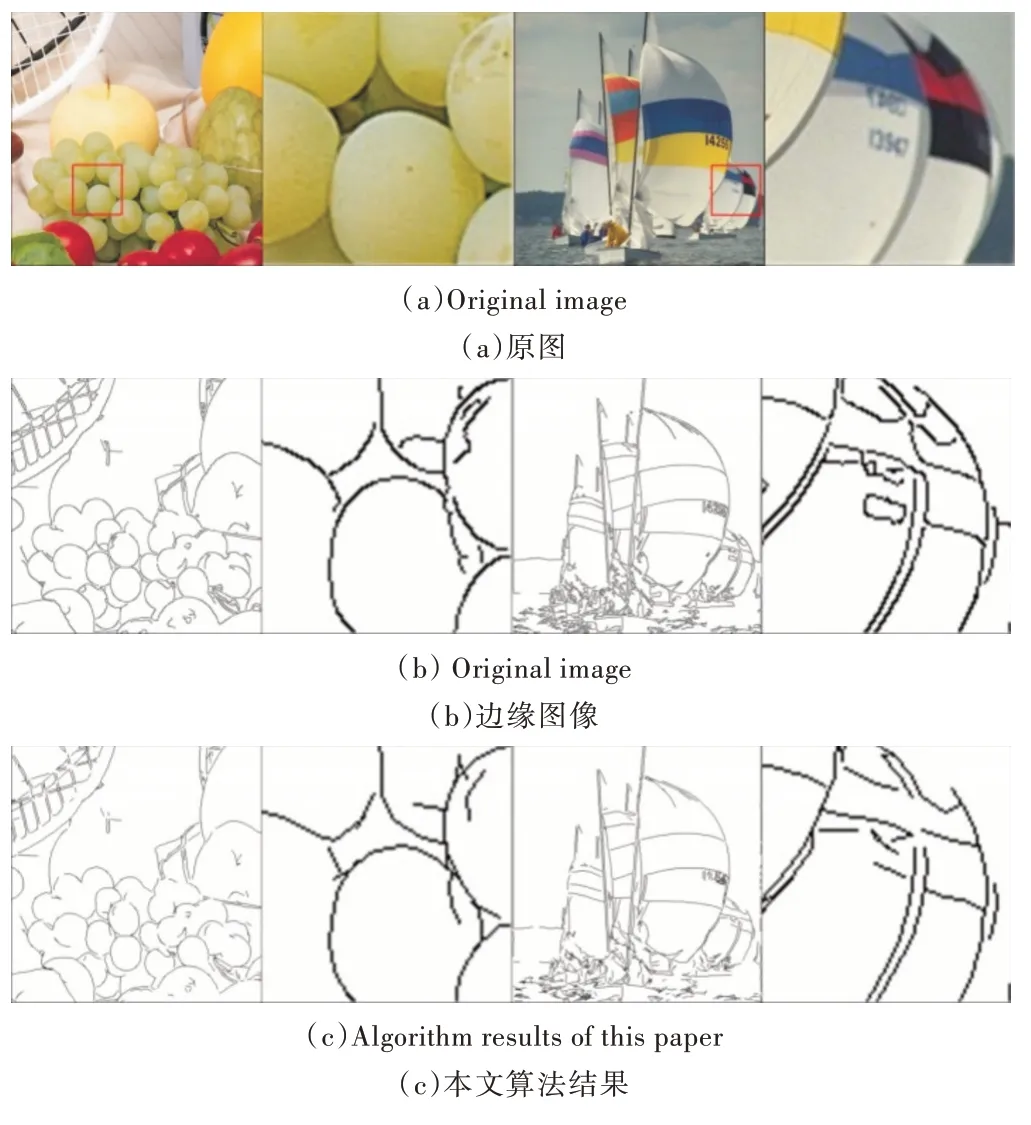
Fig.8 Curve detection effect of this method图8 本文方法检测曲线效果

Table 4 Comparison of different curve results表4 曲线检测结果对比
3 结语
本文提出一种新的直线检测方法,该方法采用分段检测思想。将本文方法与其他直线检测算法进行对比,并在包含York 城市数据库的客观评测系统中进行测试,结果表明,直线漏检和误检的情况都较少,在边缘较复杂的图片检测中依然表现稳定,鲁棒性较好。经过案例检验测试,发现该算法在曲线检测上也有良好效果。另外,本文检测的曲线属于一般性曲线,在现有基础上,可考虑改进检测曲线的方式,如在算法中引入特殊曲线(圆和椭圆等)的曲线解析式,进而使得该算法更加贴近实际应用。