基于改进Hough变换的车道线检测*
2021-04-22李后隆马骊溟钟林伟
李后隆,马骊溟,钟林伟
基于改进Hough变换的车道线检测*
李后隆,马骊溟,钟林伟
(长安大学 汽车学院,陕西 西安 710064)
针对车道线检测中存在的诸多问题,在道路图像预处理的基础上,对Canny算子中的双阈值选取进行改进,能够自适应精确提取车道线边缘特征,并利用带极角约束的Hough变换完成直线检测。算法能够在不同道路环境中准确检测车道线标识,降低光照等因素对车道线检测结果的影响。
车道线检测;图像预处理;Canny算子;改进Hough变换
前言
车道线标志是约束车辆行驶的最基本因素,因此准确快速地进行车道线检测是智能车辆的核心目标。目前已有多种车道线检测技术应用于智能车辆上,且算法仍在不断优化。但是在实际应用中车道线检测技术仍存在一定的难点,在光照条件不佳等环境中存在漏检、误检的状况,同时在图像光照低时,算法的稳定性不佳。针对以上情况,本文提出了改进Hough变换的车道线检测算法。该算法首先利用同态滤波对道路图像进行增强消除照度不均问题,降低光照条件对车道线检测的影响;然后根据Canny算子特性,通过改进双阈值选取对目标区域内的边缘特征进行提取;最后通过极角约束Hough变换完成直线检测,获得车道线检测结果,并根据车道线参数得到车辆当前可行驶区域信息。
1 图像预处理
针对原始图像(图1(a))分辨率较高,通过采用双线性插值[1]两倍降采样(图1(b)),根据人眼视觉特点对彩色图像进行灰度化[2](图1(c)),降低数字图像处理计算量。采用同态滤波[3]对图像进行增强处理(图1(d)),可以解决不同道路环境中道路图像光照不均问题,降低不同光照条件对道路信息的影响。并运用高斯滤波[4]去除图像中的噪声干扰(图1(e)),得到预处理结果。
2 车道线边缘检测
以上的图像预处理,只检测出了车道线的主体特征,还需要边缘检测算法来对车道线的边缘轮廓信息进行提取。

图1 预处理过程
在数字图像处理中可以通过计算灰度函数的微分特性提取边缘特征。根据边缘特征灰度函数的微分特性,常用的一阶算子有Roberts算子、Sobel算子、Prewitt算子等,常用的二阶算子有Laplacian算子、Log算子、Canny算子等[3][7]。
本文对比常用边缘算子检测效果,并对Canny算子中的双阈值选取进行改进,自适应提取车道线边缘特征。改进Canny算子的边缘检测结果如图2所示。可以看到,改进双阈值选取后的Canny算子检测效果较好,能够自适应提取道路图像中的边缘特征,对车道线边缘特征检测精度较高,检测结果中噪声较少。
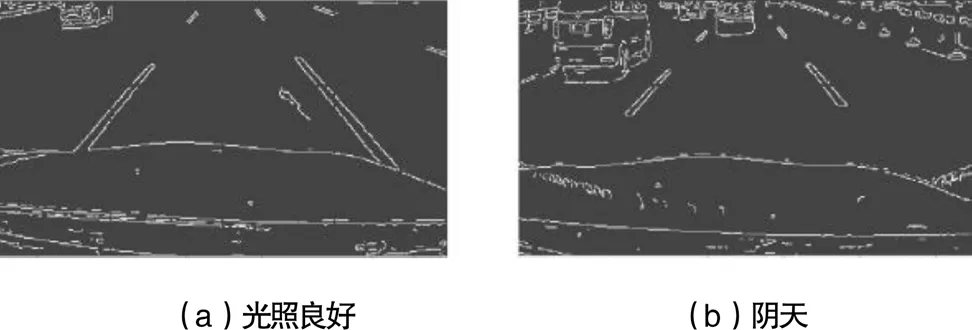
图2 改进Canny算子检测结果
3 车道线检测
3.1 极角约束Hough变换直线检测

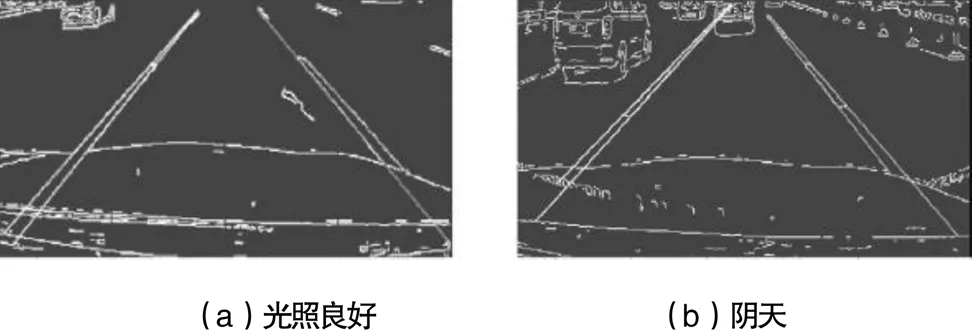
图3 改进Canny算子极角约束Hough直线检测结果
3.2 可行使区域判断
3.2.1直线聚合
在图4中可以看到,Hough变换对Canny算子边缘图像中的每一条车道线都检测得到一对直线,正常情况下每对直线的参数应该相近。将每条车道线的直线对的极角分别视为1、2,极径分别视为1、2,聚合条件见式(1),当满足该式时进行直线聚合,否则去除这对直线。图3为正常状况下直线聚合后的结果。可以看出经过直线聚合后,车道线检测结果精度更高。
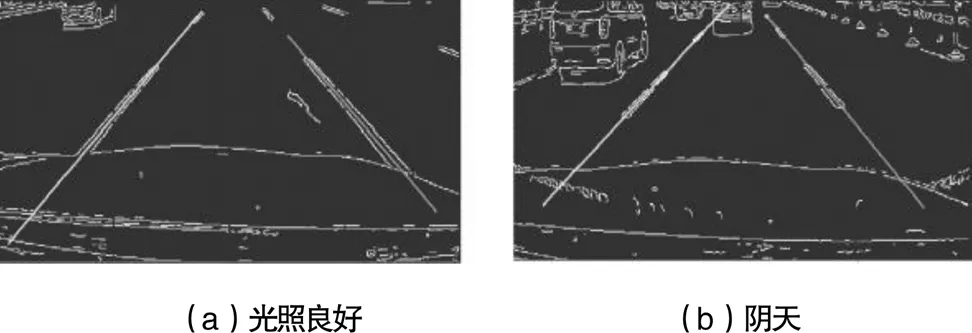
图4 直线聚合
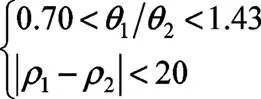
然而当车道线丢失或存在其他特征干扰时,Hough变换检测结果中可能存在误检测,此时通过直线聚合可以去除部分误检测结果,如图5所示。图5(a)中车辆特征对车道线检测产生干扰,图5(b)中右侧车道线丢失,此时车道线直线对参数相差较大。通过直线聚合后可以去除误检测,降低检测结果中的误检率。
3.2.2消失点约束
由车道线模型可知得到,实际道路中平行的两条直线在图像中延伸相交,相交点可以视为道路的消失点,因此引入道路消失点概念。将直线聚合得到的结果延伸相交,计算其交点坐标视为消失点坐标。消失点检测结果如图6所示。
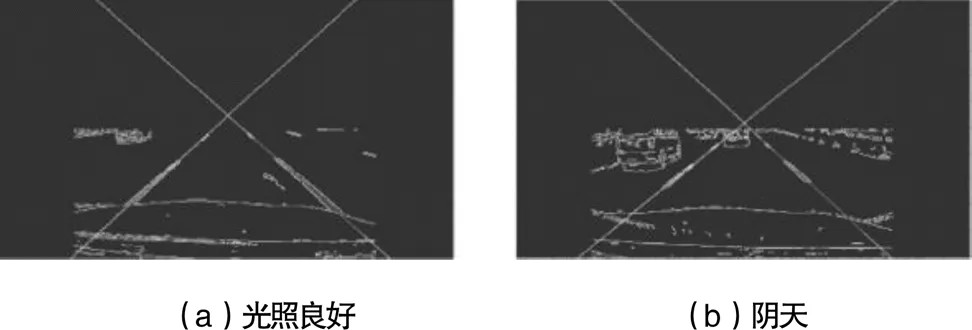
图6 消失点检测结果
消失点的位置对于道路分割的最终结果影响非常大,同时对车辆可行驶区域有着重要的约束作用[7]。消失点与左右车道线共同构成了车辆当前可行驶区域,同时消失点坐标反应车道线区域与天空区域的分界线。
4 车道线检测结果
根据直线聚合后得到的直线参数在获取的原始图像中对车道线进行拟合,并将得到的消失点坐标在原始图像中标记出来。根据消失点坐标以及左右车道线坐标,在图像中标记当前车辆可行驶区域信息。
利用采集的不同道路环境的实际道路图像对提出的车道线检测算法进行验证,实验结果如图7所示。可以看到本文车道线算法能够在不同道路环境中准确完成车道线检测,对道路图像中的实线、虚线、双实线等均具有良好的检测效果。对道路边缘、路面交通标志等特征的干扰不敏感,能够去除这些特征对车道线检测的干扰。
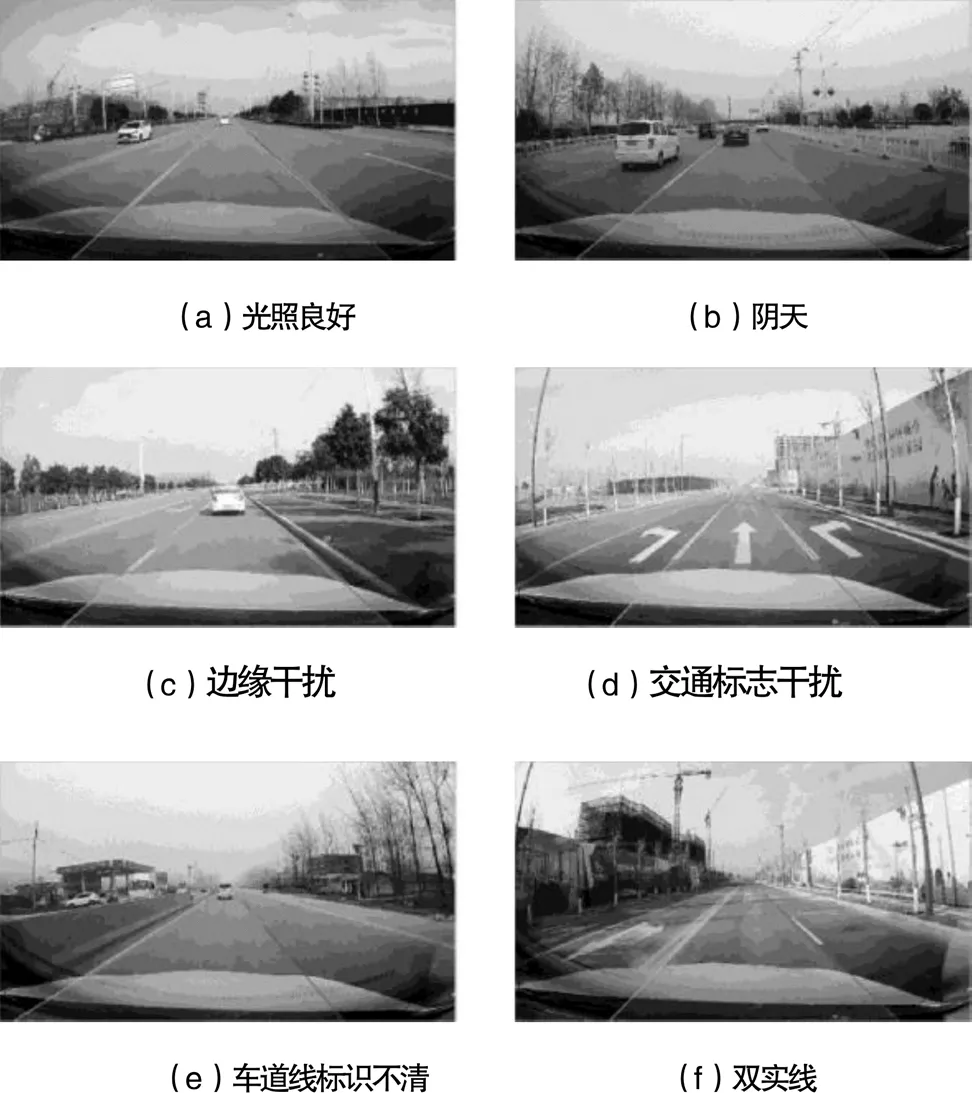
图7 不同工况下车道线检测结果
5 结论
利用带极角约束的Hough变换完成直线检测,将参数相近的直线进行聚合,提高检测精度并去除误检测。改进后的Canny算子能够独立自适应的提取车道线标识边缘特征,带极角约束的Hough变换直线检测及直线聚合可以得到精确的车道线坐标。本文车道线算法具有较好的抗干扰能力与稳定性,能够在不同道路环境中精确检测车道线。
[1] 王平,全吉成,赵柏宇.基于双线性插值的图像缩放在GPU上的实现[J].微电子学与计算机,2016,33(11):129-132.
[2] 李爱娟.智能车辆运动轨迹规划方法的研究[D].南京:南京航空航天大学,2013.
[3] 田小平,程新,吴成茂,等.基于同态滤波的彩色图像增强[J].西安邮电大学学报,2015,20(06):51-55.
[4] 姒绍辉,胡伏原,顾亚军,等.一种基于不规则区域的高斯滤波去噪算法[J].计算机科学,2014,41(11):313-316.
[5] 胡敏,李梅,汪荣贵.改进的Otsu算法在图像分割中的应用[J].电子测量与仪器学报,2010,24(05):443-449.
[6] 吴桐.基于改进霍夫变换线段检测算法的实现和应用[D].济南:山东大学.2018.
[7] 田峥,徐成,米超,等.基于消失点和主方向估计的道路分割算法[J].计算机研究与发展,2014,51(04):762-772.
Lane Detection Based on improved Hough Transform*
Li Houlong, Ma Liming, Zhong Linwei
( School of Automobile, Chang'an University, Shaanxi Xi'an 710064)
Aiming at many problems existing in lane detection. Fristly based on image preprocessing; Then extract the edge features of lane line by improving the double threshold selection of Canny operator; Finally, complete straight line detection by use the Hough transform with polar angle constraint and get the lane line detection result.The algorithm can accurately detect lane markings in different road environments and reduce the influence of illumination and other factors on lane detection results.
Lane detection; Image preprocessing; Canny operator; Improved hough transform
10.16638/j.cnki.1671-7988.2021.07.006
U491.2+23
A
1671-7988(2021)07-16-03
U491.2+23
A
1671-7988(2021)07-16-03
李后隆,硕士研究生,就读于长安大学汽车学院。
本文受国家自然基金(或项目)(51878066)资助。
