基于空间圆模型的隧道全局中轴线提取方法
2021-04-20林景峰周茂伦
林景峰 徐 飞 周茂伦
(1. 山东科技大学 测绘科学与工程学院, 山东 青岛266590; 2. 青岛秀山移动测量有限公司, 山东 青岛 266590)
0 引言
随着国家积极推进基础设施建设,地铁、公路以及铁路等各类隧道修建数量日益增多,同时隧道的安全问题也备受关注。由于隧道内部通常光线昏暗,因此采用传统的测量方法进行隧道测量存在诸多困难[1]。而三维激光扫描技术能够在弱光条件下提供高精度、高密度的测量数据,目前三维激光扫描仪广泛应用于隧道变形监测分析[2-4]、文物保护[5]以及隧道竣工测量[6]等工程。
近年来,基于三维激光扫描技术提取隧道横断面的各类方法进行的诸多研究,都需要预先提取中轴线作为基准。目前隧道中轴线提取可分为基于二维投影、点云法矢以及三维模型拟合三种方式。(1)托雷[7]和李珵[8]均将隧道三维点云分别投影至X0Y和Y0Z两个平面,通过拟合二次曲线提取隧道中轴线,该类方法只能提取局部的隧道中轴线,难以拟合完整的隧道中轴线。程云建等[9]通过单向投影以及RANSAC(Random Sample Cousensus)算法提取隧道边界点集进行多模型拟合获取初始中轴线,然后基于再次随机采样的全局优化算法获取最终的隧道全局中轴线,该方法获取的二维中轴线不能表达隧道的坡度信息;(2)蓝秋萍等[10]基于隧道原始扫描点云法矢与中轴线的垂直关系,截取多段点云并利用高斯球映射原理拟合出该段隧道的中轴线,因为法矢的精度不高,所以提取的中轴线精度较低;LI等[11]通过设置阈值剔除法矢拟合精度较低的点集,再将剩余可靠度较高的点集进行中轴线拟合,提高了隧道中轴线提取的精度。但目前该类方法相比于基于三维模型拟合获取的中轴线精度较低;(3)谢雄耀等[12]基于隧道三维点云拟合圆柱面模型,并将圆柱的轴线作为隧道中轴线,该方法只适用于直线型隧道;李双[13]改进了基于圆柱面模型拟合中轴线的方法,提出三维不变矩阵提取隧道中轴线的方法,但只能提取局部隧道中轴线。荆海峰等[14]首先将预处理后的隧道三维点云按照隧道前进方向分成若干区段,然后基于中轴线与隧道表面点云法线的垂直关系提取各区段初始中轴线,最后对各区段拟合圆柱模型进行提取高精度中轴线,虽然这种方法提取的中轴线精度较高,但是其计算过程较为繁琐以及构建模型难度大,难以得到推广应用。
综上所述,考虑到各类方法的优缺点,本文提出一种基于空间圆模型的隧道中轴线提取方法,该方法基于几何分析准确提取出隧道边界线以及全局水平中轴线,通过构建空间圆模型生成隧道全局中轴线,减少了传统方法拟合横断面需要进行坐标旋转的过程[15]并解决了全局中轴线缺少坡度信息的问题。
1 基于空间圆模型的全局中轴线拟合方法
1.1 水平中轴线提取
隧道中轴线能够准确地表达隧道的走势以及坡度等信息,目前隧道中轴线提取方法主要有基于双向投影和单向投影方法。其中双向投影方法,在直线型隧道中能够提取精度较高的中轴线,然而在面对多弯隧道时,通常需要人工分离弯曲型隧道中的直线段和弯曲段,较为耗时费力、且自动化程度不高。相比于双向投影方法,单向投影方法能够提取完整的弯曲型隧道中轴线,且精度满足隧道工程误差容忍度[16]。因此,本文首先根据投影正算获取隧道在X0Y水平面的投影点集;然后对投影点集构建Delaunay三角网提取出边界点集,并根据边界点集中的转折点间距离和隧道直径关系以及前进方向提取出左右边界线;最后采用KD树(在K维欧几里得空间组织点的数据结构,K-Dimensinal)算法提取出初始中轴线,并根据工程需求提取一定间距的水平中轴线用于截取横断面。
1.1.1基于Delaunay三角网提取边界线
以水平面为坐标系基准,将隧道三维点云投影至X0Y水平面得到条状点云数据进行提取隧道边界。目前提取平面点云边界算法较多,其中Delaunay三角网算法适用于带状形数据的边界
提取。Delaunay三角网在生成三角网过程中,以最近的三点形成三角形,且各三角形的边皆不相交,每条边都使用所在的三角形的顶点验算并记录相应的两个顶点坐标。整个验算过程中,若一条边只被一个三角形使用过,表明这两个顶点所确定的边是边界边,存储这两个顶点坐标;若一条边被两个三角形使用过,表明这两个顶点确定的边在整个三角网内部,将其剔除。如图1所示。
如图2所示,当获取隧道边界点集后,首先对边界点集按逆时针方向排序,并依次计算每相邻三个点构成的角度θ,若θ在[80°,100°]范围之间则中间点是转折点;然后提取多个转折点并计算转折点间的距离;最后比较转折点间的距离d与隧道直径Φ的大小,若d远远大于Φ,则对应的转折点位于是隧道边界线上,然后依据隧道前进方向提取出左、右边界线。

图2 左、右边界线提取
1.1.2基于KD树提取水平中轴线
如图3所示,首先对获取左边界线点集P构建KD树,然后以前进方向定义左边界的一端为起点,依次搜索出每个左边界点Pi(xpi,ypi,zpi)
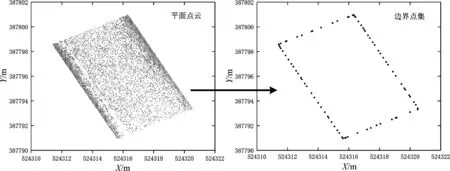
图1 边界点集提取
在右边界上最近的两个点Qi与Qj,再根据垂线公理获取在右边界的垂足点Vi(xvi,yvi,zvi);最后依据中点公式获取初始水平中轴线控制点Mi(xmi,ymi,zmi)。

图3 水平中轴线提取示意图
由于隧道中轴线是一条不间断的曲线,但在实际工程中是以一定里程控制点连接形成中轴线,因此本文根据工程需求对初始中轴线进行线性插值,并提取间距为I的水平中轴线用于提取横断面,进而拟合出等间距的隧道中轴线。
1.2 基于水平中轴线提取横断面
根据获取的水平中轴线每相邻的两个点构建直线方程并求得对应中点以及中点处横断面的法向量,从而获取中点处的横断面方程,再依据方程截取对应两点间的隧道三维数据构成横断面。

即过中点处的横断面方程可表示为:
x-xuv+ku(y-yuv)=0
(1)
虽然隧道点云密度很大,但是落到横断面上的点较少,因此截取距离横断面I/2范围内的点作为横断面上的点。如图4所示,定义平面F为过中点Muv的横断面,将截取点云Gi(xgi,ygi,zgi)依次投影至相应的横断面。其中Δx,Δy,Δz分别为三个坐标轴方向上的变化量。
(2)
其中,Gi投影至横断面上对应点集为Hi(xhi,yhi,zhi),对应的横断面法向量为eu(1,ku,0)。

图4 横断面点投影示意图
1.3 基于空间圆模型拟合中轴线
根据圆形隧道的形状以及获取的横断面数据存在噪点的问题,本文基于RANSAC算法的随机性和假设性进行滤波。随机性用于减少计算,即迭代次数是基于局内点出现的概率;而假设性,是定义随机抽出来的数据都是内点,并以此判断其他点是否为局内点进行构建模型。然后根据模型估计获取最优模型,再基于最佳模型对横断面数据进行滤波,获取精确的横断面轮廓线点集。
针对滤波后的横断面轮廓线,进行构建空间圆模型获取断面圆心作为隧道中轴线控制点。如图5所示,由于横断面轮廓线点集构成的空间圆是球体S与平面N的交线,因此轮廓线点集同时满足球面方程和横断面方程,于是可利用附有条件的间接平差原理求解空间圆参数,但是该方法所求空间圆参数是一个近似值[17],所以本文结合附有条件的间接平差原理和投影变换获取精确的空间圆参数。
1.3.1拟合近似的空间圆参数
首先设横断面方程为:
Ax+By+Cz+D=0
(3)
结合式(1)所求横断面方程,此方程中的系数分别为A=1,B=kr,C=0,D=-xr-kryr,则对应横断面的法向量为er(1,kr,0)。
其次设对应的球面方程为:
(4)
其中,球心O1坐标为(x0,y0,z0),球体半径为R1。
因为轮廓线点Hi到球心的距离为|HiO1|=R1,所以将轮廓线点代入式(8)得:
(5)
然后根据间接平差原理建立误差方程:
(6)
式(6)是非线性的误差方程,将误差方程线性化得:
(7)

最后根据误差方程的限制条件Ax+By+Cz+D=0进行附有条件的间接平差,求得近似的球心坐标为O1(x1,y1,z1)和球的半径R1。通过实验分析,当球心至横断面的迭代距离为0.01 m时,能够不占用太多算法的运行时间且减少投影变换误差。
1.3.2拟合精确的空间圆参数
如图5所示,首先获取附有条件的间接平差求得的球面方程参数;然后求得球心至横断面的垂直距离Dr;最后基于与之对应的横断面法向量er(1,kr,0),将球心坐标投影至横断面方程以获得精确空间圆的圆心O(x0,y0,z0),并求得对应的空间圆半径R。
(8)

图5 拟合空间圆示意图
(9)

2 实验分析
本文实验数据是采用FARO Focus 3D X130三维激光扫描仪采集的一段隧道数据,该段弯曲型的圆形隧道全长约为450 m,起点里程为K1+20,数据采集于运营阶段。通过比较插值前后的水平中轴线、滤波前后的横断面以及提取的隧道三维中轴线验证本文算法的适用性。
2.1 水平中轴线提取
首先将预处理后的隧道点云数据依次通过投影变换和Delaunay三角网算法提取出边界点集;然后基于边界点集提取出左右边界线并以此获取初始水平中轴线;最后通过线性插值提取间隔为0.2 m的水平中轴线作为提取横断面的基础数据。因为隧道边界数据较长不便整体显示,所以选取里程(K1+20)~(K1+70)m范围内数据进行对比插值前后的水平中轴线。如图6所示。

图6 插值前后的水平中轴线
2.2 横断面提取
首先根据提取的水平中轴线进行分割隧道三维点云数据;然后依据投影变换获取了2 239个横断面数据;最后通过对每个横断面采用RANSAC算法进行滤波获取精确的横断面轮廓线。由于隧道整体横断面轮廓线数据量较大不便整体显示,因此选取里程(K1+20)~(K1+25)m范围内数据进行对比滤波效果。如图7所示。

图7 滤波前后的隧道横断面
2.3 全局中轴线提取
隧道全局中轴线不仅能够表示隧道的走势,而且可以通过渲染高程描述隧道的坡度、坡向等信息,如图8所示。
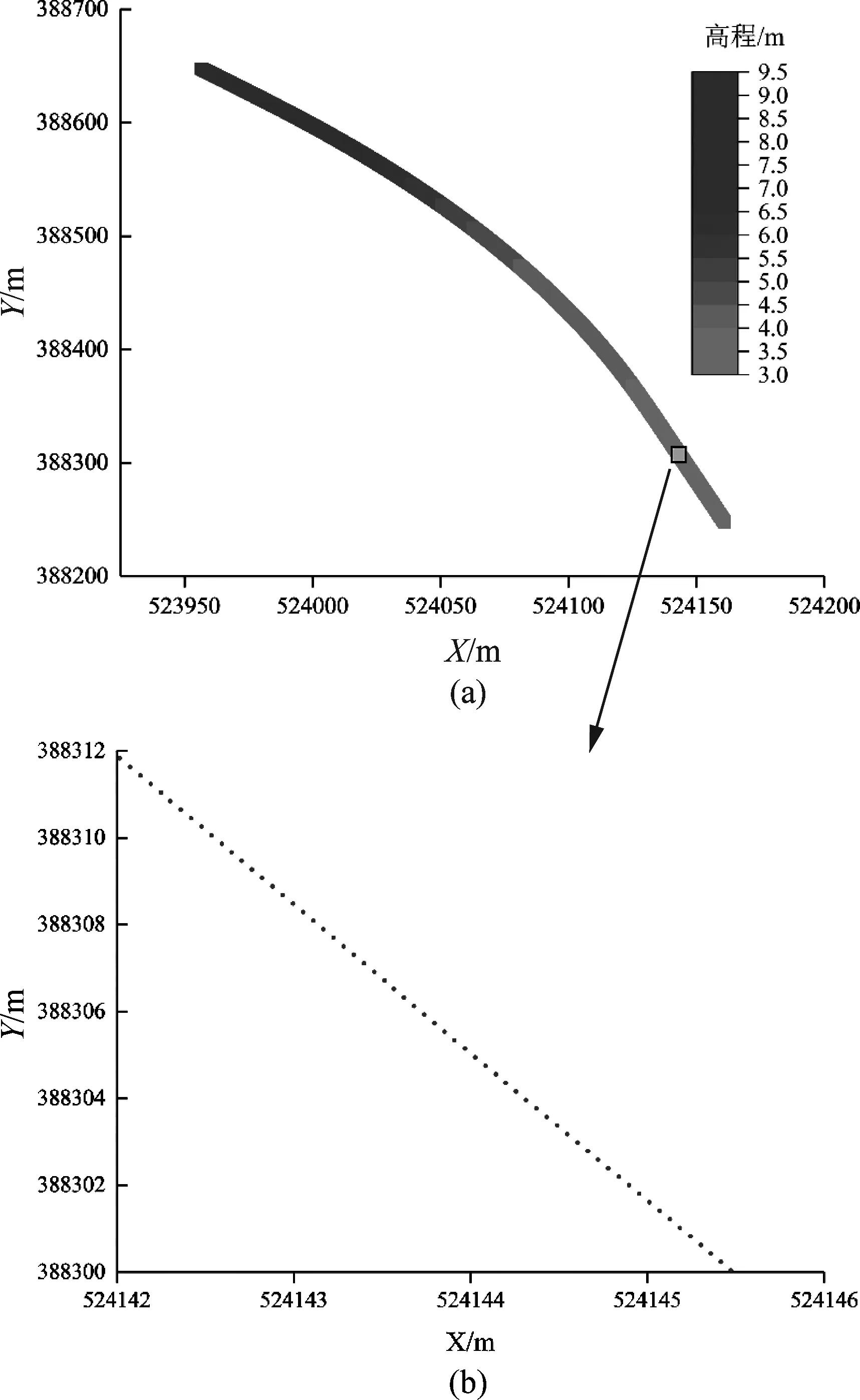
图8 隧道全局中轴线
3 结束语
本文研究了一种基于空间圆模型提取隧道全局中轴线的方法,以隧道边界线、水平中轴线以及横断面轮廓线间的空间几何关系为基准,通过构建空间圆模型生成隧道中轴线。首先提取出Delaunay三角网算法获取的边界点集中的转折点,并利用转折点间距离与隧道直径的关系提取出隧道边界线;其次结合KD树算法和线性插值方法提取出等间距的水平中轴线;然后针对横断面数据的噪点,使用RANSAC算法对横断面进行滤波获取了精确的横断面轮廓线;最后结合附有条件的间接平差和投影变换构建空间圆模型拟合出精确的隧道中轴线,避免了传统空间圆迭代拟合误差以及传统方法的横断面提取过程中需对点云进行坐标转换带来的误差,提高了拟合精度为弯曲型隧道以及井筒等圆形建筑的中轴线拟合提供了一种可参考方案。