多通道感应同步器高精度融合及其FPGA实现
2021-04-19李太平陈伟男夏振涛胡继宝
李太平 姜 林 陈伟男 夏振涛 胡继宝
(上海卫星装备研究所,上海200240)
1 引言
感应同步器作为一种电磁传感元件,结构上的多极设计可以很好地匀化加工过程中单极机械误差,最终提高系统的测量精度。同时,感应同步器工作原理完全依赖电磁耦合,具有寿命长、可靠性高、抗污染、耐高低温等一系列优点,被广泛地应用于航天、航空等领域。
针对感应同步器的工作特点,邱子峰等设计了基于DSP 和AVR 的测角系统,但是对于DSP或者AVR 来说,由于感应同步器的解算模块各不相同,没有形成统一的标准,所以没有标准的外设可用。在使用DSP 或者AVR 控制计算模块时,需要用IO 接口模拟,占用了DSP 或者AVR 有限的IO资源。刘丽艳等此方面也进行了深入的研究。
在角度融合方面,上海技术物理研究所做了大量的工作,在融合算法中,采用了七段式融合的方法,最终精度满足了使用要求。文献[7]中,结合解算单元的跟踪原理,推导了粗精通道,以及每个通道的sin、cos 和ref 信号之间的幅值和相位关系要求,为了高精度解算和融合提供了理论支撑。
本文主要设计一套高性能的角度跟踪系统,介绍了系统的硬件设计,重点描述了硬件系统设计、基于谐波注入的角度融合算法和该算法在FPGA 中的实现,最终获得感应同步器的高精度融合绝对角度。试验结果表明,该角度融合系统可以很好的抑制外界干扰,融合精度优于1.22 ×10°,提高了系统的测量精度,满足航天任务的需要。
2 硬件系统设计
如图1所示,相对于文献[3]中采用COM 口与上位机通讯的方式,该硬件系统直接采用JTAG 口与上位机通讯。在FPGA 内嵌入逻辑分析仪,上位机中使用ChipScope 与FPGA 通讯,既可以降低开发周期,同时也可以充分利用逻辑分析仪中提供的各类触发机制,实现对片内信号的高速跟踪,而不需要受限于COM 口的传输速率。
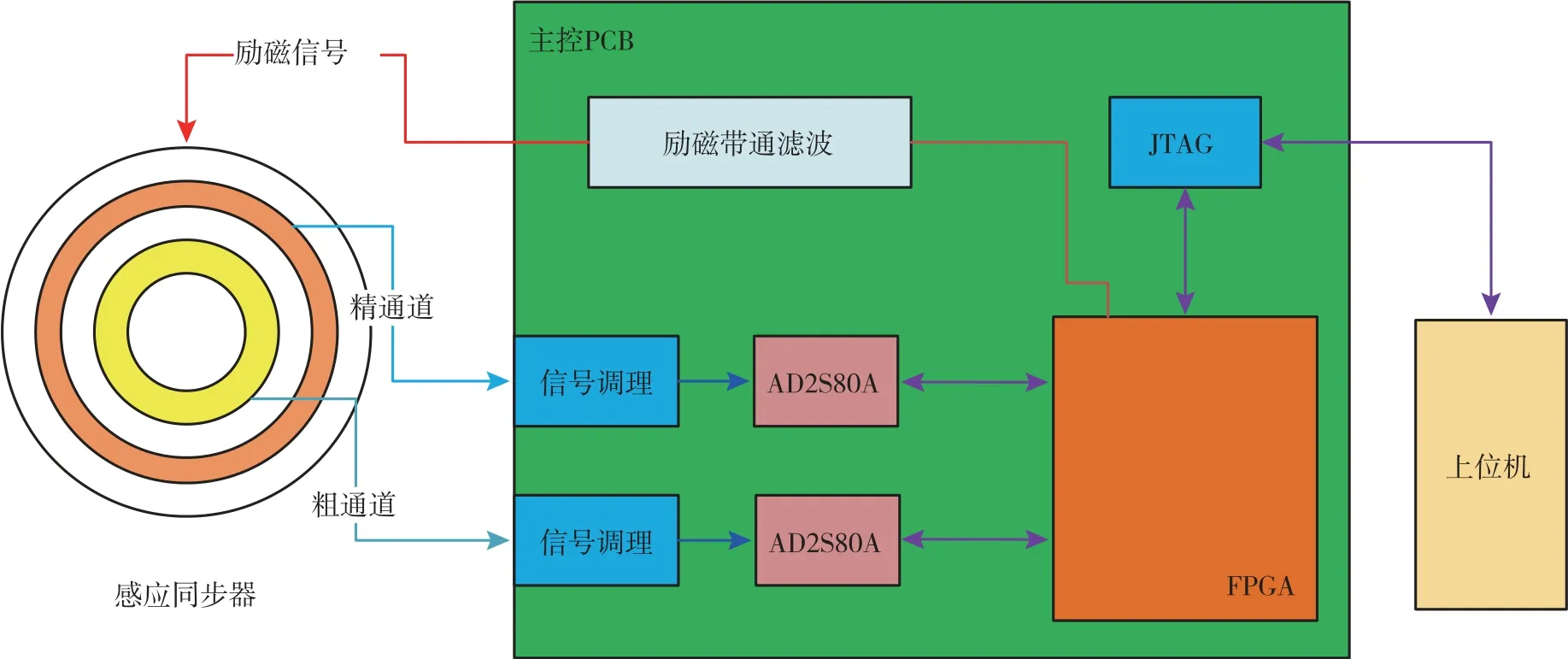
图1 感应同步器测角系统Fig.1 Inductive synchronizer angle measuring system
2.1 励磁电路
感应同步器采用交流信号励磁,在一些精度要求不高的场合可以直接使用方波励磁,方波的占空比是根据励磁信号的等效幅值确定的。但是,这种方波励磁方法会带来比较大的谐波分量,造成系统的测量精度降低,难以满足本系统的测量精度要求,所以本系统仍然采用传统的正弦波励磁。为了减少元器件的数量,降低电路硬件系统设计的复杂程度,同时提高FPGA 的利用率,励磁信号采用了SPWM + 带通滤波器的方式生成。该励磁信号直接由FPGA 片上生成,SPWM 波的参数如表1所示。
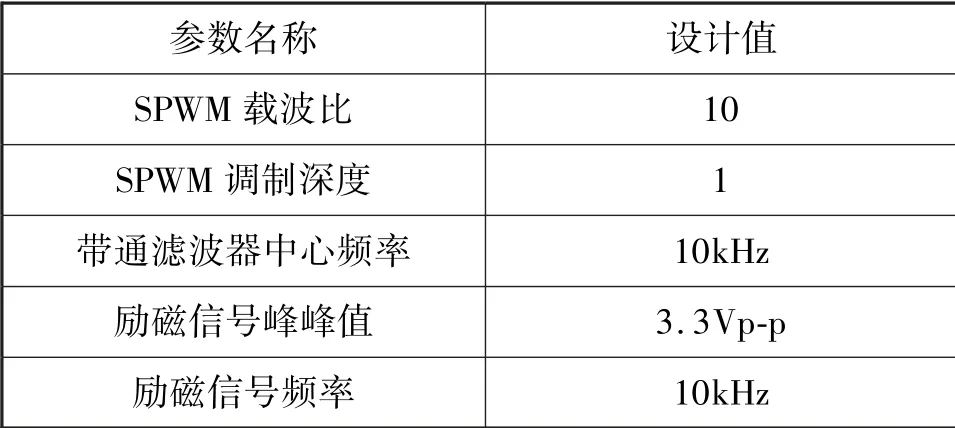
表1 正弦励磁信号设计值Tab.1 Sinusoidal excitation parameters
SPWM 生成的励磁信号为变脉宽的方波,滤波转换为正弦波后再接入功率运算放大器,功率运算放大器采用OPA548 实现,驱动电流限制在500mA,最终驱动感应同步器。SPWM 波和滤波后激励正弦波如图2所示。
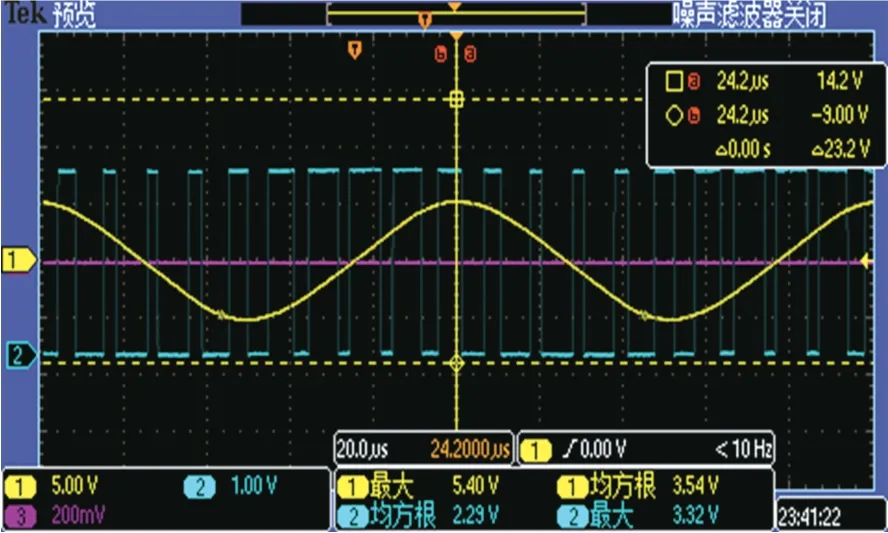
图2 SPWM 波与滤波后正弦励磁信号Fig.2 SPWM and filtered sinusoidal excitation
对于滤波模块,采用一级带通滤波器和一级低通滤波器串联的形式实现。其中带通滤波器设计如图3所示。
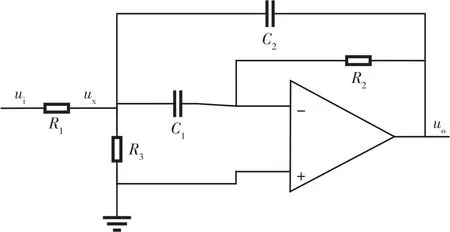
图3 带通滤波器Fig.3 Band pass filter
假设输入为u
,输出端为u
,R
和R
连接点处的电压为u
,则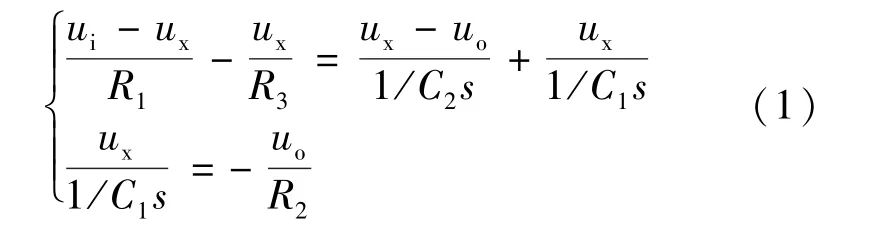
可以求得传递函数为
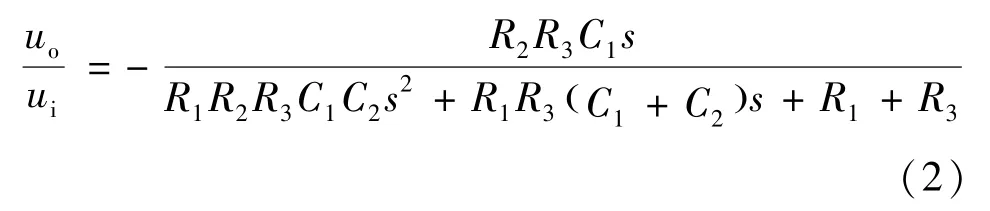
R
=21kΩ、R
=42.2kΩ、R
=8.45kΩ、C
=1.0nF、C
=1.0nF,系统bode 图如图4所示。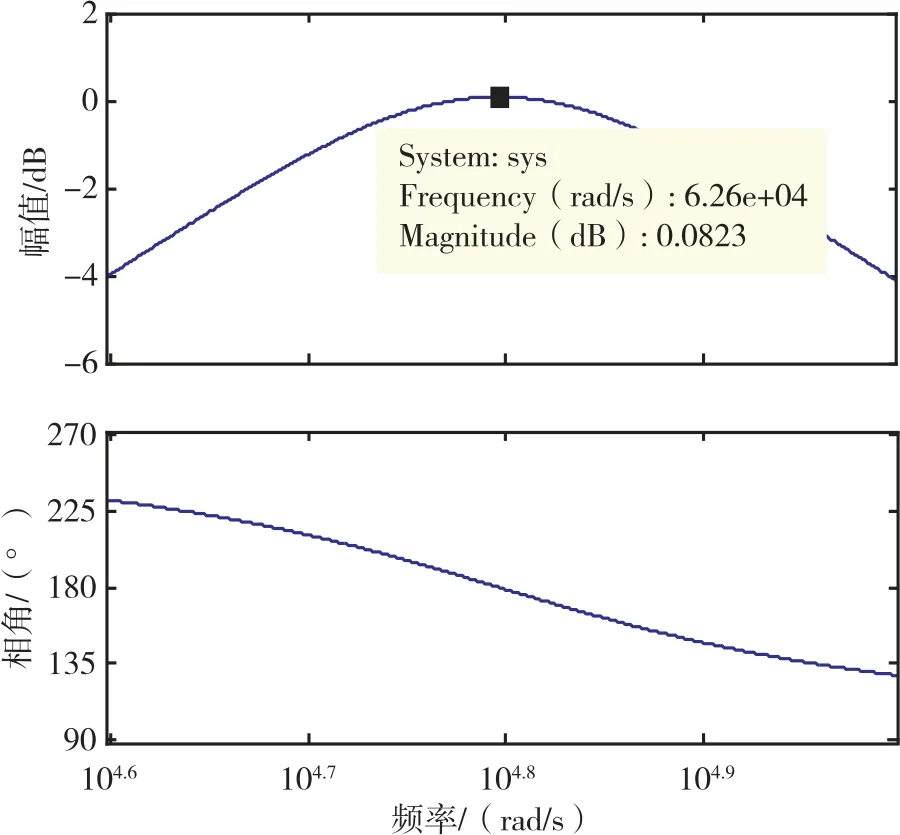
图4 带通滤波器bode 图Fig.4 Band pass filter bode diagram
2.2 感应同步器角度采集
在励磁信号的周期激励下,感应同步器的sin、cos 端输出与励磁频率一致的正弦波,但是信号低于2mV,为了满足后端解算的需要,需要经过图1中的信号调理模块进行处理,最终到达解算模块的波形如图5所示。图5 中1、2 和3 通道对应的分别为sin、cos 和ref 信号的实测波形。
图5 单通道sin、cos 和ref 信号Fig.5 Single channel sin/cos/ref signals
信号调理模块主要包括一级差分放大,一级带通、一级低通和一级全通移相放大器。差分放大主要为了提高系统的输入阻抗,降低输出阻抗,同时提供一个较大的初级放大倍数。带通和低通是为了滤除不必要的频率分量,全通移相可以确保最终输出端sin、cos 和ref 信号之间经过前级放大移相之后,仍然满足特定的相位关系。由于差分放大器的通带很宽,所以在感应同步器的工作频率内,差分放大模块只放大信号的幅值,而不影响系统的中心频率,所以在调节过程中,在完成了带通和低通的调节之后,可以再次调节差分放大电路的放大倍数,以确保sin、cos 端输出信号的一致性。差分运算放大器选择采用INA128。
根据文献[7],为了提高系统的测量精度,sin、cos 和ref 信号之间相位和幅值之间需要满足特定的关系,根据系统精度设计如表2所示。
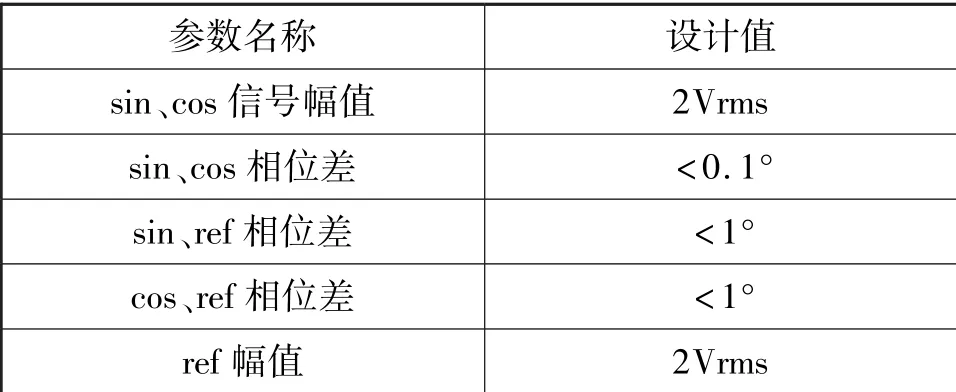
表2 sin、cos 与ref 信号设计值Tab.2 Parameters of sin/cos/ref signals
将感应同步器输出的sin、cos 信号以及ref 信号经过信号调理之后,接入AD2S80A 中,即可实现角度的测量。测量的位宽和跟踪角速度与图6所示的外围电路的具体参数有关。
对于AD2S80A 的具体配置,相关的手册配置非常详细,在均有介绍,本文不再赘述。需要说明的是,AD2S80A 的内部跟踪原理为锁相环跟踪,对于多极感应同步器,如多通道感应同步器的精通道,其最大跟踪角速度为电气角速度,等于机械角速度与极对数的乘积,在配置图6所示的外围电路时,需要考虑极对数对电气角速度的放大效应。
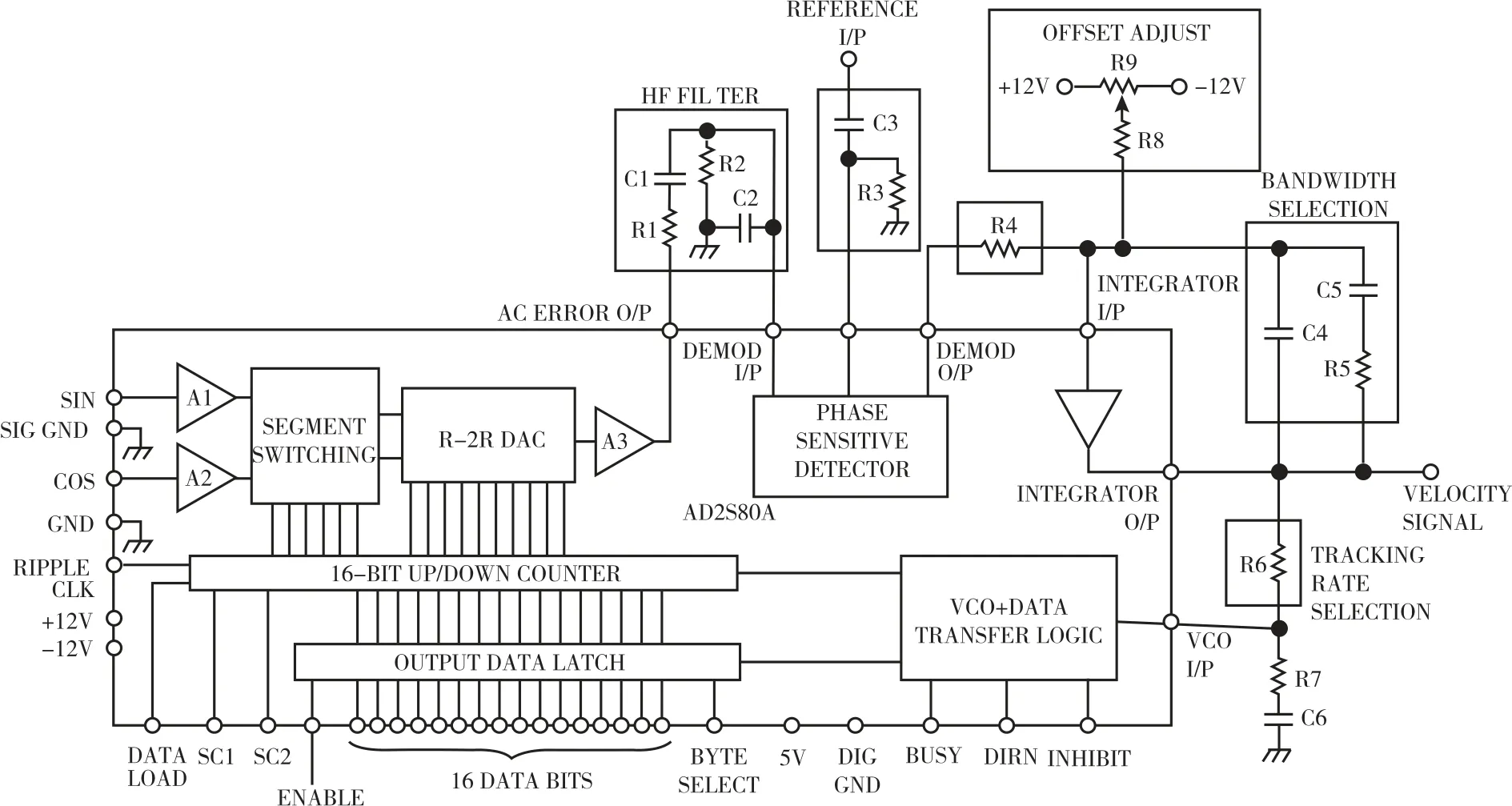
图6 AD2S80A 外围电路Fig.6 AD2S80A peripheral circuit
3 谐波注入融合
由于AD2S80A 的最高量化位数只有16 bits,一般稳态时最高也只能实现14 bits。对应360°的工作范围,量化精度只有1.3,难以满足高精度的需求。所以需要对感应同步器的粗精通道数据进行融合,以提高测量精度。
根据多通道感应同步器粗精通道的极对数,可得:
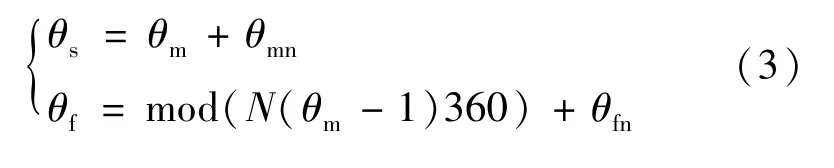
θ
——电机的实际机械转角;θ
、θ
——分别为粗通道、精通道角度输出数据;θ
、θ
——分别为粗通道、精通道角度的测量误差,θ
主要来源于感应同步器设计、安装误差,θ
主要来源于制造误差,为小量;N
——精通道的极对数。所以,当N
=180,忽略θ
,可得:

所以当





图7 校正前后粗精通道角度差Fig.7 Coarse and fine channels angle difference before and after correction
4 FPGA实现
4.1 粗通道数据矫正
4.1.1 正弦值计算
根据公式(7)的融合算法,需要进行1、2、4 次谐波的正弦值计算。虽然Xilinx 提供了可以进行实时计算正余弦值的IP 核,但是这种方法需要占用大量的FPGA 资源。所以在满足精度的前提下,为了节约FPGA 的LUT 资源,充分利用片上RAM,正弦值采用查表的方法获得。
如图8所示,利用Xilinx 提供的IP 核Distributed Memory Generator,生成一个深度为128,宽度为12 bits 的ROM。ROM 采用.coe 文件进行初始化,保存128 个的正弦值,其中第n
个数据为sin((n
-1) ×90°/128)。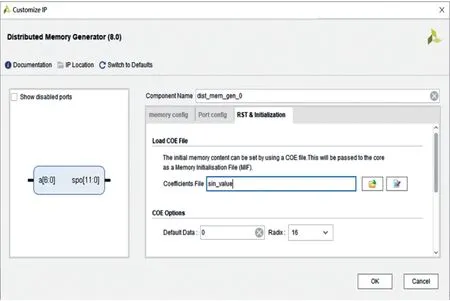
图8 正弦表Fig.8 Sine Table
对于公式(7)中的加法和乘法,由于三角函数和角度值的循环性,可以直接进行加法、乘法运算,而不需要考虑数据溢出的问题。
以求解sinα
为例,说明公式(7)各项正弦值的计算。假设α
用16 位数据表示,最高位为α
[15],最低位为α
[0],图8 中输入地址为a
[6:0],输出数据为d
[11:0],正弦值用13 位的有符号数表示,则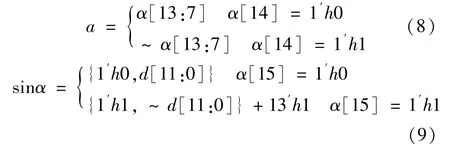
xhy
表示一个长度为x
位,用16 进制表示为y
的一个数据,h
表示为16 进制。4.1.2 高精度数据融合
为了实现粗精通道的数据融合,根据公式(4)需要计算θ
/
180。θ
的量化位数为16 位,0°对应于16h
0,360°对应于17h
10000,所以θ
/
180 可以直接进行移位运算,而不需要进行额外的除法。θ
的最大取值为360°,如果θ
用角度制定点数表示,需要的整数部分最短只需要8 位,则θ
/
180 可以表示为将其二进制数据右移7 位,即为其角度制。对于公式(4)的取整运算,θ
的量化位数为16位,0°对应于16h
0,360°对应于17h
10000,所以计算角度的过程可以表示为
θ
|表示θ
的角度制表示,θ
|表示θ
的二进制表示,1LSB =360°/65536。为了复用计算A
sin(θ
+ψ
)过程中的乘法IP核,根据公式(9),sinα
为13 位的有符号数,所以公式(10)中,360/65536 也表示为13 位的有符号数,为了提高乘法精度,选择小数的部分尽可能长,选择小数部分为19 位,即

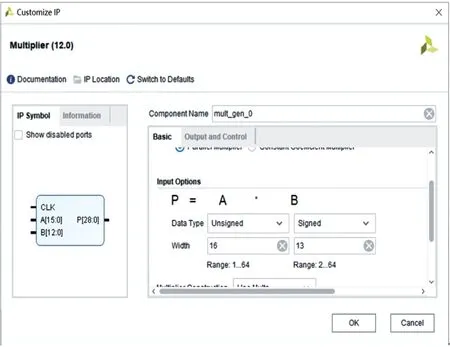
图9 乘法器IPFig.9 Multiplier IP
将公式(11)代入公式(10),即可求得θ
,结合θ
/180 的移位运算,最终代入公式(4),即可求得感应同步器的实际机械转角位置。4.2 试验结果
融合之后,FPGA 内的逻辑分析仪实时监测,将电机旋转到任意位置后,自测角度未发生跳变,ILA 中的trigger 信号未触发,自测精度优于2 位,即1.22×10°。
5 结束语
根据绝对式感应同步器的测角原理,设计了感应同步器的励磁电路和信号调理电路,通过配置转换模块的外围电路,实现了对角度的稳态跟踪测量,提出了谐波注入的方法,进行了数据融合,并在FPGA 内进行了实现和试验验证。结果表明,该测角系统具有很强的抗干扰能力,自测精度优于1.22 ×10°。该测角系统具有很强的通用性,同时,在FPGA 内实现时,使用的IP 均为基础IP,整个系统具有很强的可移植性,对于其他设计具有一定的参考意义。
