推雪铲平行四边形提升机构结构与强度分析
2021-04-17葛凌志
葛凌志
(长沙中联重科环境产业有限公司, 湖南 长沙 410200)
0 引言
除雪是我国北方地区冬季的主要应急保障工作,稳定可靠的除雪设备是实现快速除雪的有力保障。 根据目前的技术发展及应用情况, 国内外主要除雪方式是机械式除雪[1]。 机械除雪装置又以前置除雪设备为主,前置除雪设备是指安装在牵引车辆前端的除雪滚刷, 推雪铲等设备, 前置除雪设备通过液压及相应的机械提升结构在各个除雪工作场地间进行转移, 国外一般采用液压油缸带动举升臂和柔性链条提升除雪设备进行转场工作,但该结构在牵引车辆行驶时存在反复的跳动, 严重影响牵引车辆的驾驶性能,并且容易损伤车辆底盘大梁。平行四边形机构为铰接刚性结构, 设备在快速转换场地时几乎没有跳动, 用于推雪铲等前置除雪设备的提升装置具有很大的优势。
1 平行四边形提升机构结构分析
平行四边形机构输出杆和输入杆能以相同的角速度同时转动,且连杆只能做平行移动。 根据机械原理知识,平行四边形的自由度为:3×3-2×4=1, 一个主动件就能实现确定的运动[2]。 采用平行四边形机构的推雪铲,能够保证在一个液压油缸驱动的升降时铲板在一个竖直面上稳定运动并刚性固定在任一位置。本文针对高速公路用重型推雪铲进行分析, 推雪铲自重1200kg,连接形式呈悬臂结构。推雪铲的提升机构,见图1。 由上叉臂、油缸、后连接件、下叉臂和前连接件组成, 前连接件与除雪工作装置铲板相连, 后连接件安装在牵引车辆底盘上。上叉臂、后连接件、下叉臂和前连接件之间通过铰接点连接,形成平行四边形机构。

图1 提升机构结构图Fig.1 Structure of lifting mechanism
2 平行四边形提升机构力学模型
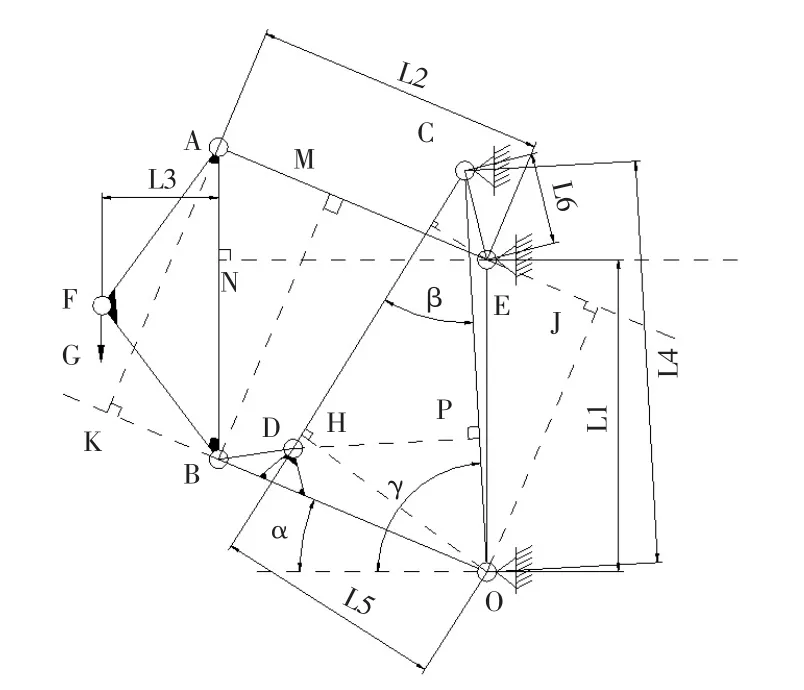
图2 提升机构力学几何模型Fig.2 Mechanical geometric model of lifting mechanism
建立平行四杆提升机构力学几何模型如图2 所示,F点为除雪设备工作装置质心,其重量为G,C、D 分别为油缸的两个铰点, 杆CD 为升降油缸,AE 为上叉臂,OB 为下叉臂,OEC 为后连接件即机架,其中OE 安装在车辆前端并成铅垂布置, 推雪铲工作装置铲板与前连接件视为一个整体构件ABF;ABOE 为平行四边形结构AB=OE,L1=OE,L2=AE=BO,L3为F 点到AB 的垂直距离,L4=OC,L5=OD,ɑ 为OB 与水平面的夹角即提升角,γ 为OC 与水平面夹角,β 为CD 与OC 夹角; 设F1,F2 和F3 分别为BO 杆、杆AE 和杆CD 上的作用力,油缸实时长度为L。作 辅 助 线AK ⊥BO,EN ⊥AB,BM ⊥AE,OJ ⊥AE,OH ⊥CD,DP⊥OC 则根据几何知识得到:
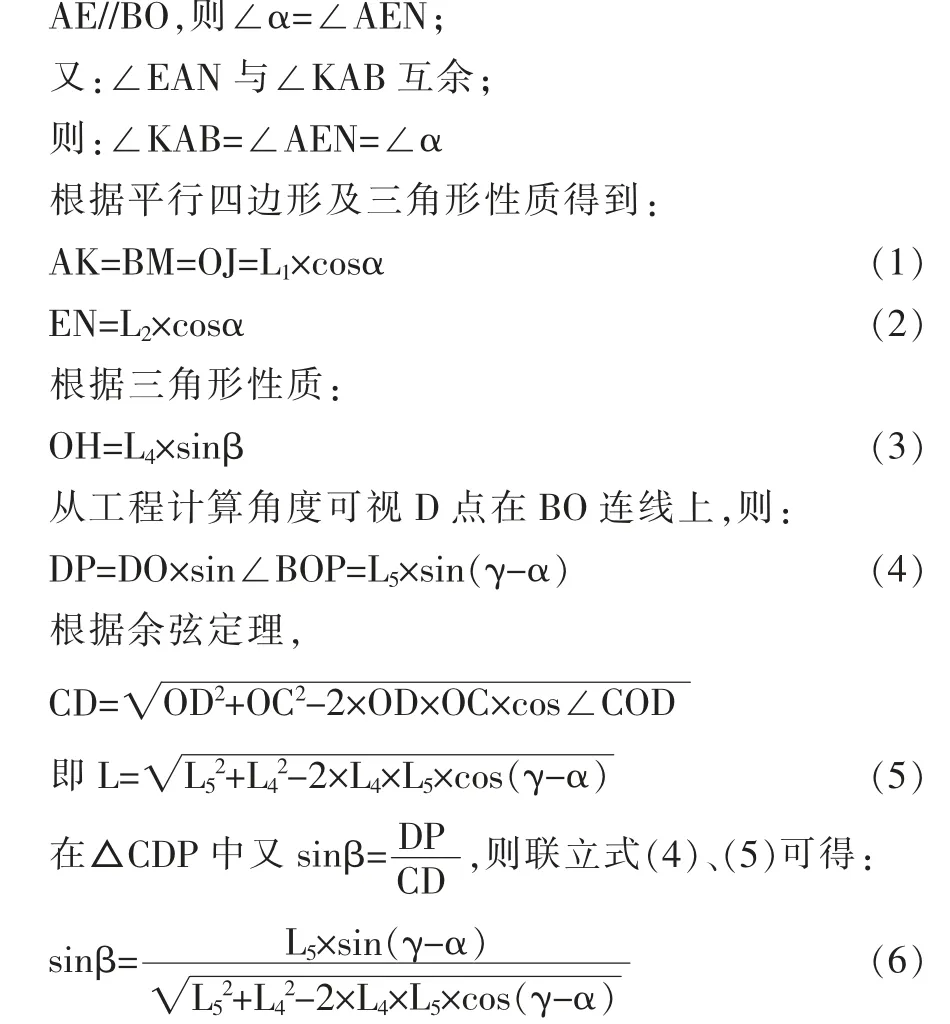
从工程角度, 在进行力矩平衡计算时将油缸的下铰点D 与平行四杆机构的铰点B 合并考虑,则G 和F2对B点力矩平衡:
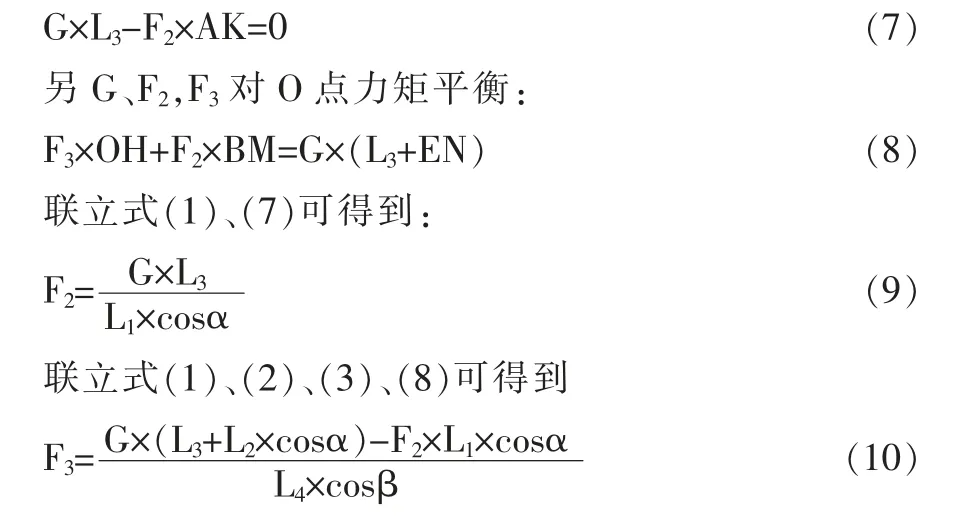
式(9)和式(10)为平行四边形机构的力学几何模型。根据总体结构尺寸及运动所需空间, 取G 为1200kg,L1=495,L2=515,L3=293,L4=984.5,γ=75.725°
以α 为自变量, 得到不同姿态下油缸和上叉臂的受力情况和油缸长度变化情况,见图3~图5。
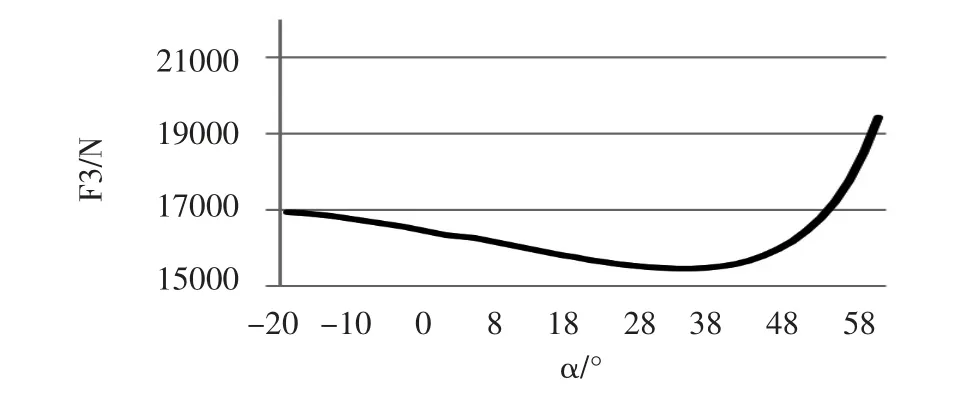
图3 油缸力变化曲线Fig. 3 Oil cylinder force variation curve
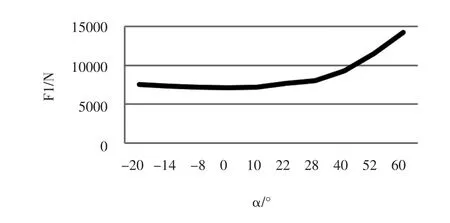
图4 上叉臂力变化曲线Fig. 4 Variation curve of upper fork arm strength
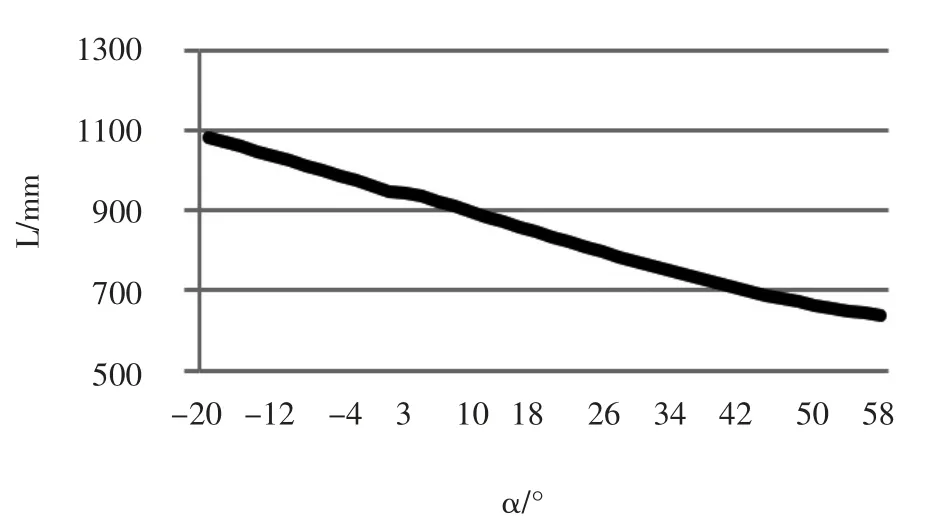
图5 油缸行程变化曲线Fig. 5 Variation curve of oil cylinder stroke
3 平行四杆提升机构的ADAMS 仿真
以平行四边形机构的各连接铰点及推雪铲工作装置质心建立Marker 参数化点,构建ADAMS 仿真模型如图6 所示, 将油缸的伸缩长度设为自变量, 计算油缸以及平行四边形结构上、 下叉臂受力, 相应曲线,见图7~图9 所示。
对比ADAMAS 模型仿真计算结果与几何算法得出的F1 和F3 对比,两种算法计算结果相近。

图6 ADAMS 仿真模型Fig.6 ADAMS simulation model
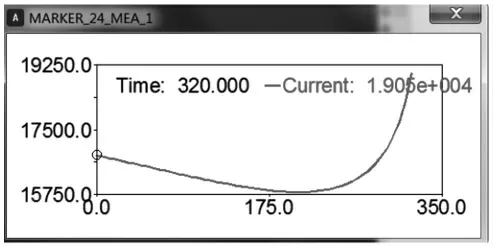
图7 油缸力变化曲线Fig.7 Variation curve of cylinder force
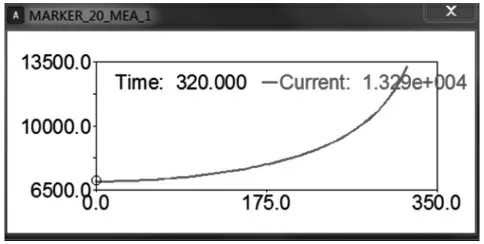
图8 上叉臂受力曲线Fig.8 Force curve of upper fork arm
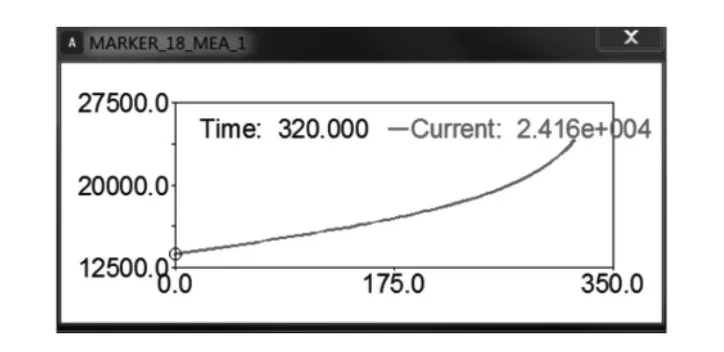
图9 下叉臂力受力曲线Fig.9 Force curve of lower fork arm
4 上下叉臂的强度分析
根据实际工况分析,上、下叉臂是平行四边提升机构的薄弱环节,单独对其结构进行强度分析。
4.1 上叉臂的强度分析
根据图8, 上叉臂在提升油缸提升至最上方,即上叉臂向上翻转50°时,受力最大,为13500N。通过计算,其应力云图,见图10, 最大应力为铰接孔耳板处σ=253Mpa,未超过Q345 的 许 用 应 力 [σs]=345Mpa,结构设计合理。
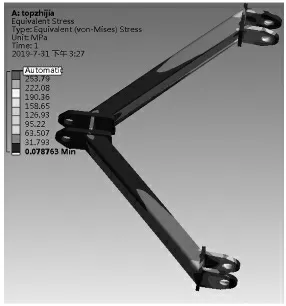
图10 上叉臂应力云图Fig.10 Stress nephogram of upper fork arm
4.2 下叉臂的强度分析
根据工况分析, 当提升油缸提升至最上方,即下叉臂向上翻转50°时,下叉臂受力最大,此时油缸受力为17000N, 下叉臂本身受力为25000N,通过计算得到应力云图,见图11,最大应力为铰接孔耳板处σ=198Mpa, 未超过Q345的许用应力[σs]=345Mpa,结构设计合理。

图11 下叉臂应力云图Fig. 11 Stress nephogram of lower fork arm
5 结束语
本文分析并建立了推雪铲平行四边形提升机构的力学几何模型和ADAMS 多体动力学仿真模型, 研究了运动过程中各结构的受力特征, 确定了前置除雪机械平行四边形提升机构有限元分析边界条件, 并对重要结构进行了强度校核, 探索出了该结构的设计计算理论和设计方法。 通过该设计方法研发的推雪铲已在国内多个城市使用,整体结构已得到了实际验证。希望本文能够对推雪铲的产品设计者起到一定的启发作用。 、
