基于AIS数据的渔业船舶碰撞风险度评估模型
2021-04-17邵承谱朱浩纲温小飞
邵承谱, 朱浩纲, 温小飞, 平 弘
(1.武汉理工大学 交通学院, 武汉 430063;2.浙江省港航管理中心, 杭州 310005;3.浙江海洋大学 船舶与海运学院, 浙江 舟山 316022)
0 引 言
渔业船舶是开展渔业捕捞活动时用到的重要生产工具,相比普通货运船舶,具有尺度小、作业前后载重量差异大、速度快和作业区域集中等特点[1],其安全性备受行业主管部门的重视。船舶自动识别系统(Automatic Identification System,AIS)[2]已在渔业船舶上得到广泛应用,在渔业船舶安全管理方面发挥着重要作用,但仍有进一步发展和完善的空间[3],特别是在AIS数据挖掘方面。在已有研究中:郑中义等[4]从时间和空间2个角度分析了船舶碰撞危险度(Collision Risk Index,CRI)的本质,完善了船舶CRI模型;LEE等[5]针对渔业船舶航行安全提出了预警系统设计思路;楼于海等[6]提出了AIS数据二次开发利用的问题;孙海南[7]、吴红双[8]和李萍萍[9]开展了基于AIS数据源的船舶避碰及碰撞危险评价系统开发和试验研究;冮龙晖等[10]和BAKDI等[11]针对船舶会遇及碰撞危险问题提出了AIS数据处理方法。当前国内外在AIS数据应用、船舶避碰技术和船舶安全评价等方面已积累较多的基础理论与方法,但针对渔业船舶安全问题开展的AIS数据深入挖掘和应用研究较少。对此,本文基于AIS数据研究开发渔业船舶安全管理与评价系统,为渔业管理部门和渔民开展渔业船舶安全风险防控提供参考。
1 渔业船舶CRI
CRI是对海上船舶之间发生碰撞的可能性的一种度量,其取值范围为0~1[12]。若CRI为0,则表示两船之间没有碰撞的可能性;若CRI为1,则表示本船的任何操作都无法避免两船发生碰撞。进一步细化CRI并形成渔业船舶碰撞危险度(Collision Risk Index of Fishing Vessel, CRI-FV)等级,分别为Ⅰ级(0,0.2]、Ⅱ级(0.2,0.4]、Ⅲ级(0.4,0.6]、Ⅳ级(0.6,0.8]和Ⅴ级(0.8,1.0)。
CRI-FV的影响因素[13]有很多,一般包括本船航速、目标船航速、两船速度比、船舶操纵性能、船舶尺寸、两船会遇时最小通过距离(Distance of Closest Point of Approaching,dCPA)及其误差、两船到达最近会遇点所需时间(Time of Closest Point of Approaching,tCPA)及其误差、两船间的距离、目标船的舷角、海上的能见度情况、航行水域的船舶交通密度和驾驶员的实际操船经验等。dCPA和tCPA是关键因素[14],将船舶CRI划分为空间CRI和时间CRI,用于表征船舶碰撞的概率和紧迫度。基于通用船舶碰撞风险模型,结合渔业船舶的固有特性,CRI-FV计算模型可表示为
U(CRI-FV)=U(dCPA)·W1+U(tCPA)·W2+U(D)·W3
(1)
式(1)中:U(CRI-FV)、U(dCPA)、U(tCPA)和U(D)分别为CRI-FV、dCPA、tCPA和两船距离D的计算值;W1、W2和W3分别为对应指标的影响权重,结合层次分析法和专家经验法求取。U(dCPA)、U(D)和U(tCPA)的计算式分别为
(2)
(3)
(4)
式(2)~式(4)中:d1为两船安全驶过的最小距离;d2为形成会遇局面的最大距离,d2=d1K,K为由船舶状态的不稳定性和两船的不协调性等因素决定的系数;r1为本船与目标船摆脱紧迫局面的最小距离;r2为本船与目标船形成紧迫局面的距离;t1为本船与目标船摆脱紧迫局面的最短时间;t2为形成紧迫局面的时间。D、dCPA和tCPA的计算式分别为
(5)
(6)
(7)
式(5)~式(7)中:v0为本船航速;L0为本船经度;B0为本船纬度;C0为本船航向角;vT为目标船航速;LT为目标船经度;BT为目标船纬度;CT为目标船航向角;a为地球椭球长半径;e为第一偏心率。
2 CRI-FV计算流程
针对渔业船舶的特点,采用模糊数学方法对渔业船舶CRI各关键影响因素进行处理,设计CRI-FV计算算法,建立基于层次分析法的影响因素危险度权重数学模型,实现对CRI-FV的优化求解。CRI-FV计算流程见图1,其中:vR为目标船相对于本船的航速;CR为目标船相对于本船的航向;B0T为目标船相对于本船的方位(目标船舷角)。
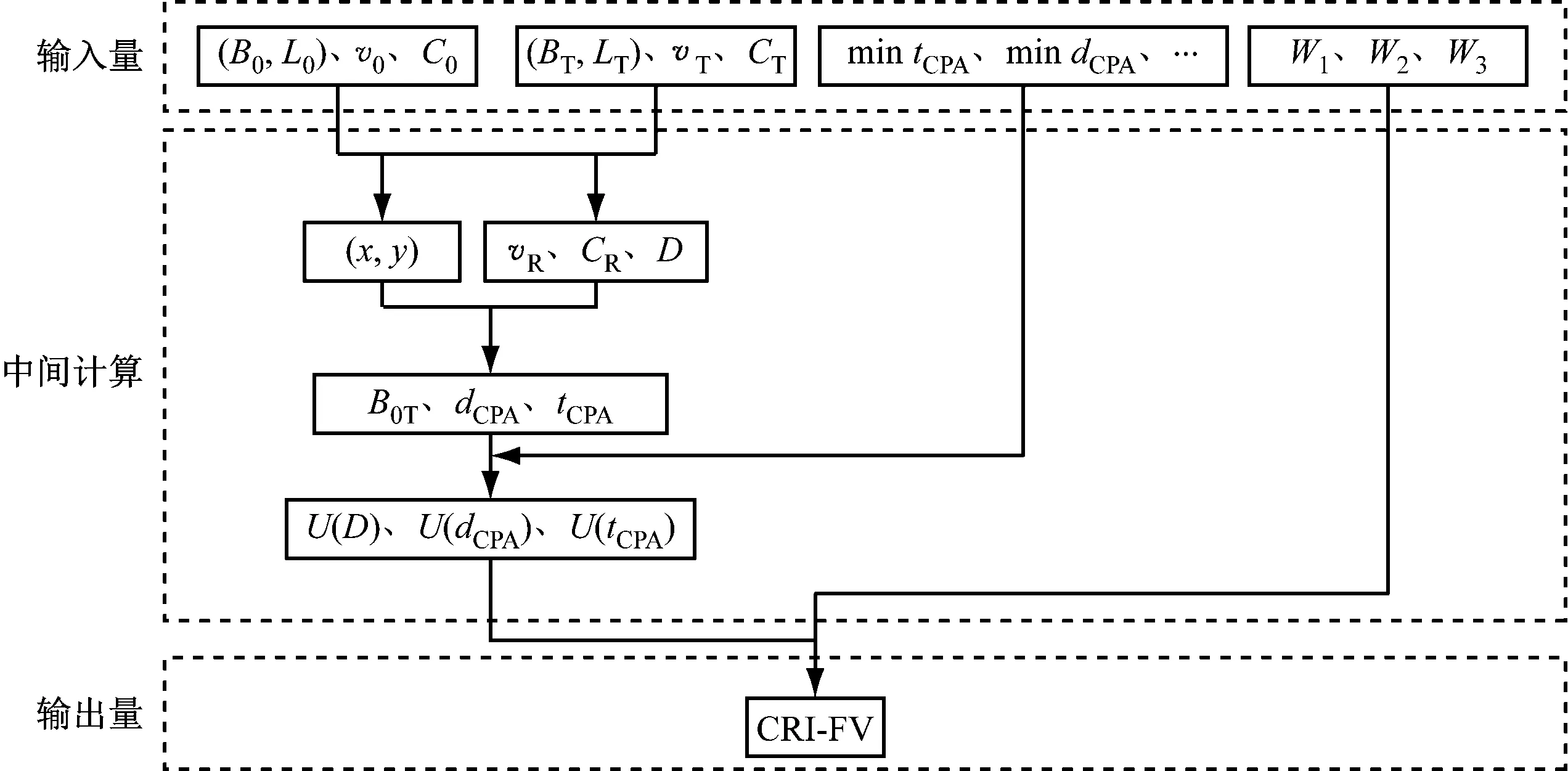
图1 CRI-FV计算流程
CRI-FV计算流程可分为4个基本部分,具体如下:
1)获取渔业船舶AIS数据,包括静态数据和动态数据。静态数据主要有船舶识别号、船舶载重量、船长、船宽和船舶操纵参数等;动态数据主要有实时经度、实时纬度、航速、航向和相关运动参数等。
2)通过数学模型计算相关评价因素,计算出两船之间的距离、舷角差、航速比、dCPA及其误差和tCPA及其误差等。
3)导入安全评估主要参数(见表1)并计算主导因素危险度指数,提高系统评价的精准度。
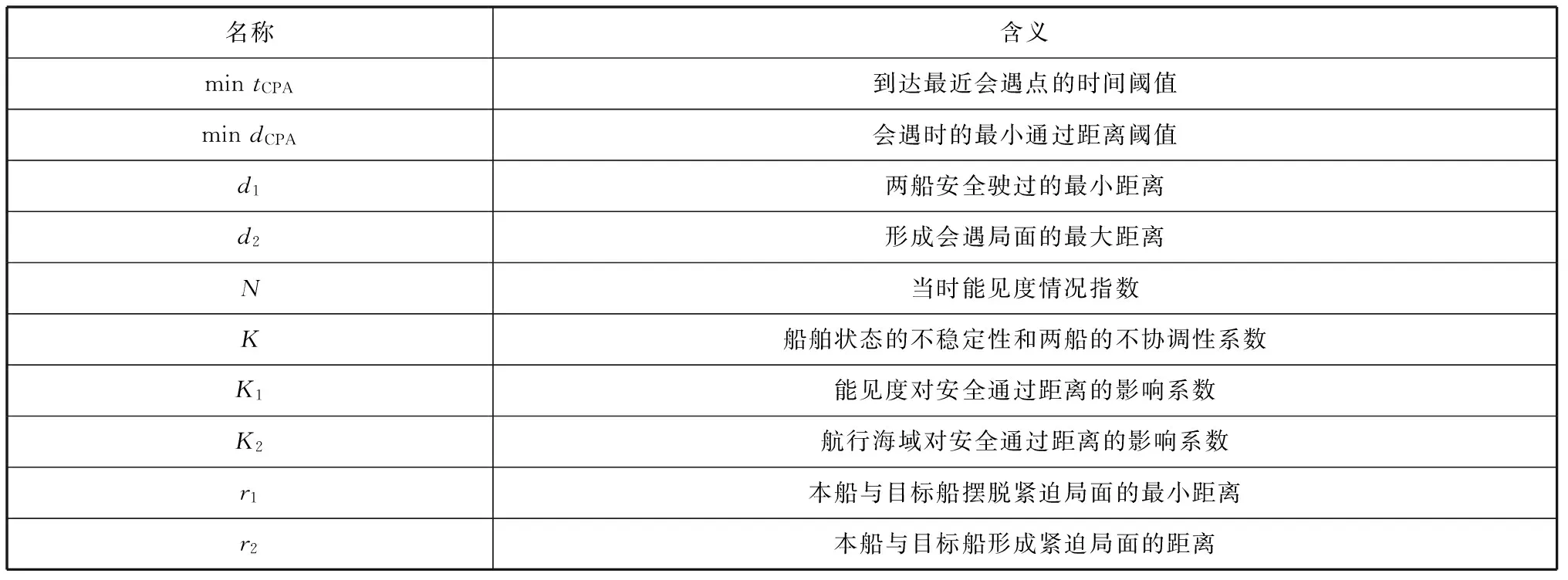
表1 安全评估主要参数
4)采用模糊数学方法和层次分析法确定各关键影响因素的数值和权重分配,计算CRI-FV。
基于CRI-FV评估模型和计算流程开发CRI-FV评估系统。该系统由AIS数据实时获取接口功能模块、AIS数据解码功能模块、数据库功能模块、关键参数计算功能模块和CRI计算功能模块等5个功能模块组成,系统基本构架见图2。
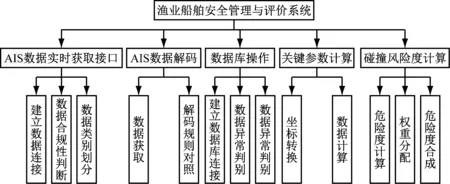
图2 CRI-FV评估系统基本构架
3 实船验证
选取某捕捞船作为本船,将其2018年2月2日00:00:00的部分AIS数据作为AIS数据源。考虑到AIS信息收发的间隔性,采用时间外推法对本船周围海域一段时间内的所有船舶的AIS信息进行时间对准,以获得该时刻所有船舶的信息,对系统的功能和模型的计算分析能力进行验证。本船的主要信息:水上移动通信业务标识码(Maritime Mobile Service Identify,MMSI)为412431966;呼号为RA20053;船长为12 m;船宽为4 m。实船验证时提取的部分AIS原始数据见表2。
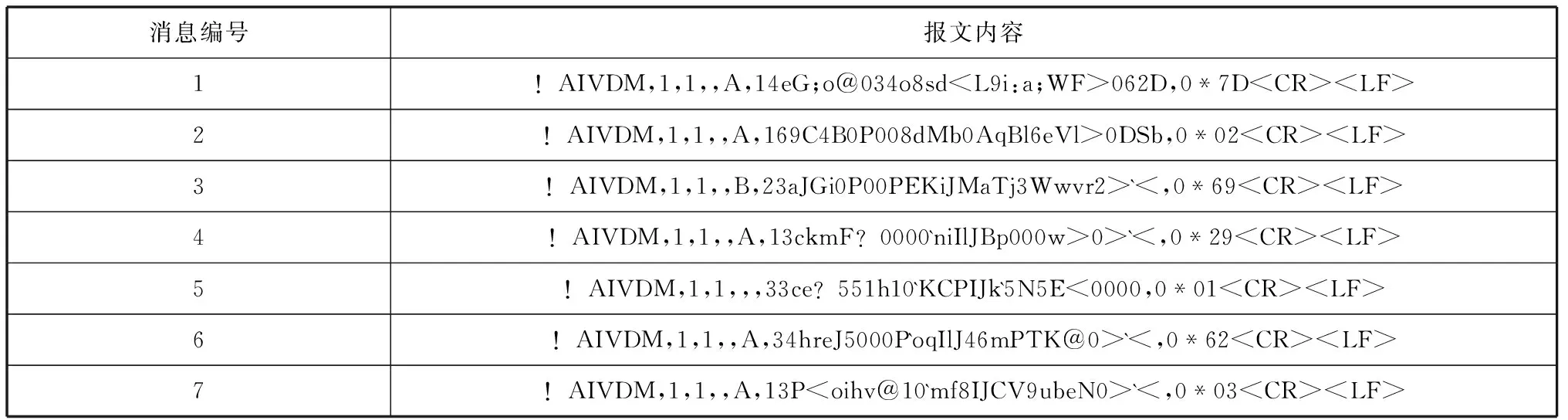
表2 实船验证时提取的部分AIS原始数据
按照解码规则解码之后,提取每条消息包含的关键信息。通过调取船舶MMSI查询船舶类型和其他参数,将这些信息拼接成系统计算所需的整体数据库。通过数据筛选模块,对非捕捞船型的数据进行过滤。选取目标船周围的22艘捕捞船作为测试对象,初步计算得到周围船舶相对目标船的距离和方位角。通过系统计算,评估本船周围海域的航行安全性。图3为风险度评估结果,其中危险度划分为5个等级(Ⅰ~Ⅴ),目标船与本船的主要参数和评价指标数据见表3。
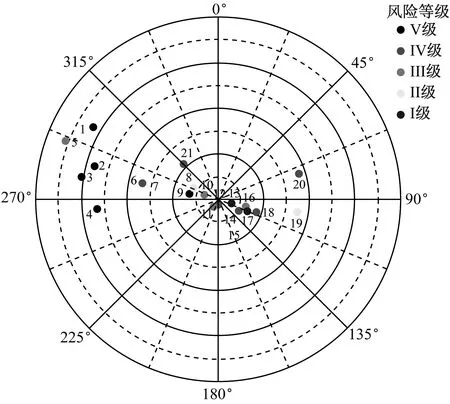
图3 风险度评估结果
从图3和表3中可看出:风险等级为Ⅴ级的5艘船舶的CRI最大,应采取相应的操船动作,如尽可能地避免对正横前的船舶向左转向(除被追越船外)、规避正横和正横后的船舶所在方位、将航速减到维持航向的最小航速等;风险等级为Ⅰ级的2艘船舶可按原计划航行,基本上无碰撞风险;风险等级为Ⅱ~Ⅳ级的船舶可按中间梯度,采取《国际海上避碰规则》(以下简称《规则》)所给操船方案。根据专家评价结果和《规则》的要求,当上述风险等级为Ⅴ级的船舶与目标船小角度交叉相遇且其航速远大于目标船时,可认为该船是航海经验中的危险船舶,验证了基于AIS数据的渔业船舶安全管理与评价系统功能模块的有效性。
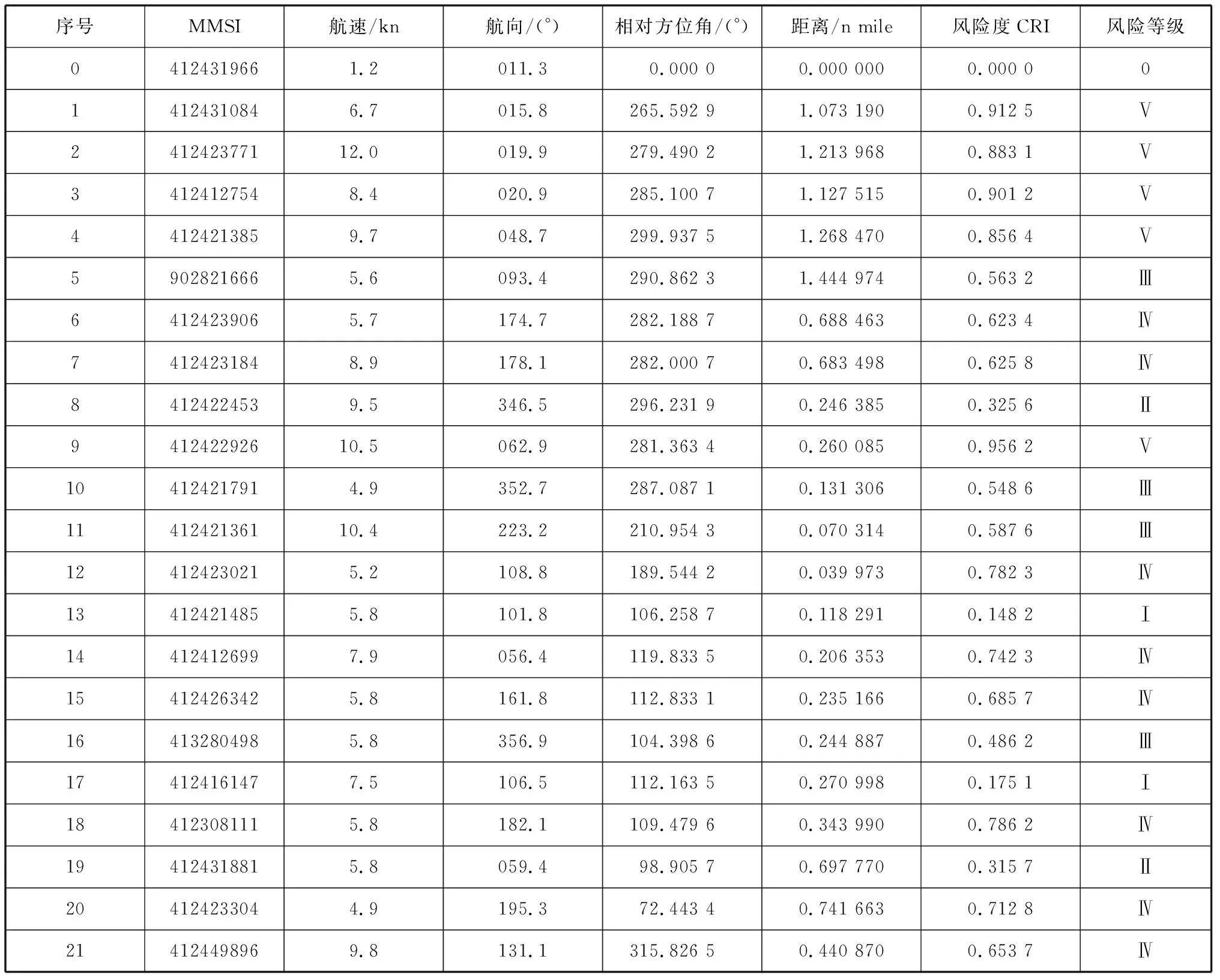
表3 目标船与本船的主要参数和评价指标数据
4 结 语
本文以AIS为数据源进行了数据库重构和数据深度挖掘,实现了基于AIS数据的渔业船舶安全管理与评价系统开发。测试结果表明,该系统可为渔业安全管理部门和船舶所有人提供快速、有效的CRI-FV评估和预测,为保障渔业船舶的安全性提供技术支持。由于AIS收发的信息具有间隔性,会影响系统评价的及时性,后续可开展雷达、北斗导航等多数据源融合方面的研究,进一步提升系统的准确性和实时性。
