无人机航空磁测在滩涂区地质调查的应用试验
2021-04-16西永在吴珊廖桂香刘俊杰路宁李永博
西永在,吴珊,廖桂香,刘俊杰,路宁,李永博
(1.中国地质科学院 地球物理地球化学勘查研究所,河北 廊坊 065000; 2.自然资源部 地球物理电磁法探测技术重点实验室,河北 廊坊 065000;3.国家现代地质勘查工程技术研究中心,河北 廊坊 065000)
0 引言
无人机航磁测量具有部署便捷、应用成本低、智能化、高效率、高精度等特点,目前已经成为了航空物探测量技术的一个新兴分支,其研发与应用日益受到世界各航空地球物理公司和单位的广泛关注。如:2003年英国Magsurvey公司研发的PrionUAV航磁系统;2004年荷兰Fugro公司在Insitu公司的协助下,改装了扫描鹰无人机Georanger-Ⅰ型高精度无人机航磁系统;2005年加拿大万能翼地球物理公司利用Venturer型无人机,集成铯光泵磁力仪形成无人机航磁系统;德国MGT公司利用无人直升机MD4-1000型搭载小型化磁通门磁力仪,应用于UXO及滑坡探测;2012年日本发展了多款基于无人直升机平台的航磁系统,取得一定效果[1-9]。国内相对起步较晚,2008年至2011年间,中船重工715所、中国科学院遥感与数字地球研究所、中国自然资源航空物探遥感中心以及劳雷工业公司等单位先后开展了基于固定翼无人机航磁测量技术的研究工作,均取得了一定研究成果,但未见应用于实际测量;2012年北京大学等多家单位也开展了这方面的专题研究,取得了一定量的实验数据,但未得到推广应用;桔灯勘探公司开展的基于多旋翼无人机搭载磁通门磁力仪系统,质量轻但精度较低。
2013年,中国地质科学院地球物理地球化学勘查研究所(简称物化探所)突破了无人机系统集成、磁补偿等关键技术难题,成功将航磁仪搭载于CH-3型无人机平台上,集成了我国首台国产中型无人机航磁测量系统[10],并在黑龙江多宝山、新疆克拉玛依、喀什不同地形地区,开展了多种类型的地质调查应用示范工作,数据质量优秀,取得了良好的地质效果[11-12]。
在新时代条件下,海岸带地质调查工作被越来越重视,物化探所在江苏试点滩涂区的海陆结合带开展了CH-3型无人机航磁测量工作,通过对原有无人机航磁测量系统改进,为海陆对接带地质调查提供有效技术支撑,提高了测量效率及测量精度等,并在人文建设、区域性断裂空间展布、磁性基底分布等方面取得了良好的效果。
1 CH-3型无人机航磁测量系统
1.1 系统组成
CH-3型无人机是一款国产中型无人机,也是目前国内为数不多的较为成熟机型,其有效载荷可达160 kg,航程约1 600 km,巡航速度在170~200 km/h,磁场干扰低于10 nT,并且发动机性能及测控系统可靠性强,具有超低空飞行能力,适合开展航磁测量工作。
由物化探所自主研发的基于CH-3型无人机航磁测量系统主要由无人机平台、地面测控系统、磁探头、航磁补偿及收录仪组成(图1),该系统具有测量精度高、全自主飞行、远程监控等优势。经过具体测试及验证,磁探头安装在该飞机翼尖水滴形整流罩内,此处磁场梯度最小(即磁场干扰最弱),航磁补偿及收录仪位于机舱中部机腹内。地面测控站通过通信软件全程监控无人机飞行过程,同时实时监测航磁数据质量。
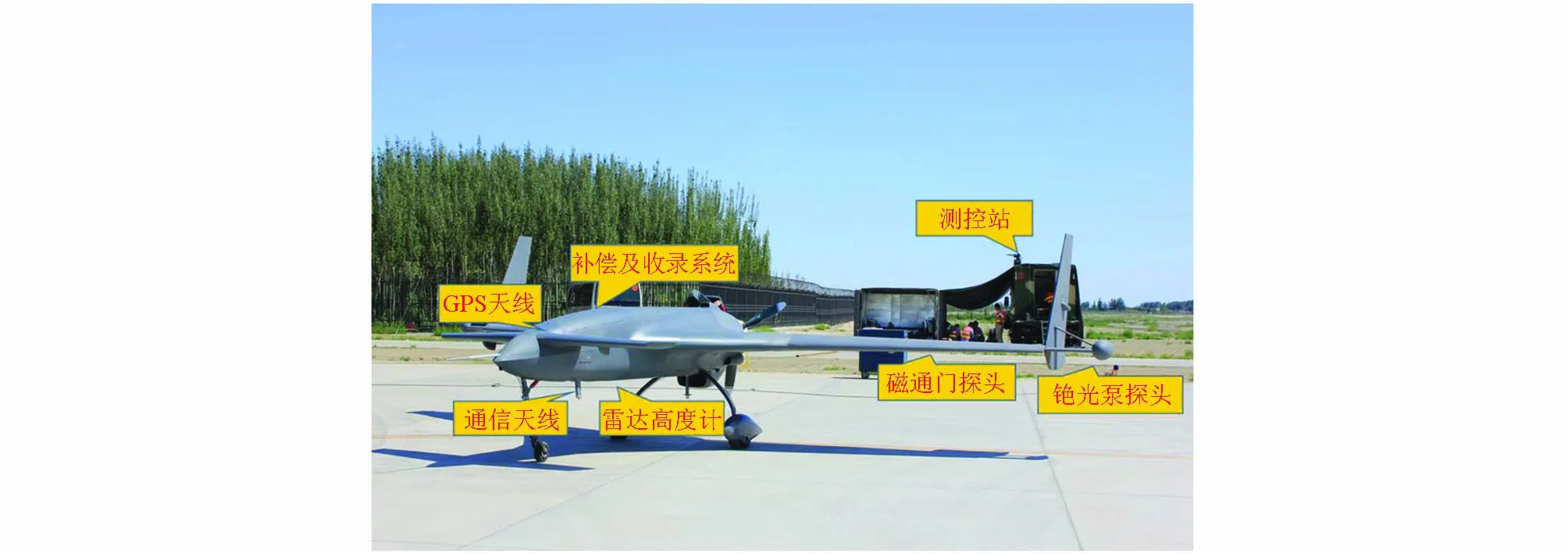
图1 CH-3型无人机航磁测量系统Fig.1 The CH-3 UAV aeromagnetic system
1.2 滩涂区测量系统改进
滩涂区测量范围包括陆地、海岸结合带和部分海域地区,测量范围广,为提高测量效率,需要尽可能提升无人机作业半径,同时针对滩涂区开发的特殊性,需开展大比例尺、高精度航磁测量工作,这也需要优化数据采集系统和数据处理软件等,以满足测量要求,因此,需要对现有无人机航磁测量系统进行改进提升。
1) 在无线电测控系统的基础上,制定了无人机载航空磁力仪卫星测控通讯协议,集成研发了一套基于海事卫星和无线电双测控模式的无人机航空磁测系统,在国内首次成功应用于滩涂区航磁测量。该技术大幅度提升了无人机作业半径,降低了人员和设备需求,为在地面测控站难以抵近的滩涂区作业提供了切实可行的解决方案。系统接口关系图如图2。
2) 通过改进完善数据采集系统和数据处理软件,实现了无人机差分GPS定位数据同步采集和处理,定位数据刷新率由1 Hz提高至5 Hz,提高了定位精度和数据密度。通过该项改进,进一步提高了无人机航空电磁系统的电磁兼容性,简化了系统硬件,降低了故障率。
3) 新系统通过改进接口硬件电路、测控软件以及数据处理软件,可以实现DAARC500和AARC510等不同型号、尺寸的航磁数据采集、收录及实时补偿系统的搭载能力,提高了系统集成灵活性。
4) 在磁总场测量系统基础上,集成研发了无人机水平横向梯度测量系统,成功开展了航磁梯度补偿,并首次在滩涂区开展了应用实验。
2 试点滩涂区地质调查应用
2.1 试点滩涂区概况及测量质量
试点滩涂区位于江苏省南通市如东县小洋口港附近,距离盐城南洋国际机场约125 km,设计面积250 km2。试点区陆地部分约占1/3,滩涂及极浅海约占2/3,地形最大落差在20 m以内,但是由于滩涂区的开发利用中建设有大量风车,为保证飞行安全,设计飞行高度为210 m,测量比例尺1∶2.5万。本次测量平均飞行高度210 m,测网疏密度250±3.8 m,动态噪声一级资料占比93.66%,总精度为2.51 nT,飞行和数据质量优秀[13]。
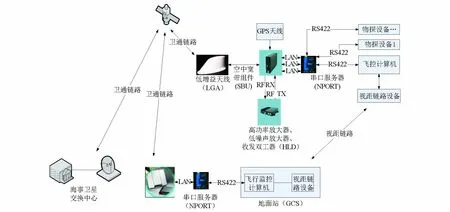
图2 海事卫星通讯测控系统接口关系Fig.2 Interface diagram of maritime satellite communication measurement and control system
2.2 地质概况及磁性特征
实验区位于海岸带滩涂区,全区均为第四系和新近系厚覆盖,第四系底界面埋深约为280~300 m。300 m以深最上部地层为新近系盐城组灰绿色、棕黄色亚黏土夹粉砂岩、中粗砂,该地层顶部为棕黄、灰黄色夹灰绿色亚黏土(硬土层),约10~15 m厚,是长江三角洲地区第四系与新近系地层分界标志层。该区位于环太平洋中新生代岩浆活动带上,是长江中下游岩浆活动带的东延部分,大致分为中生代燕山期和新生代喜马拉雅期,中生代岩浆岩以中酸性—酸性侵入岩和中性火山岩为主;新生代岩浆岩以玄武岩为主。
第四系和新近系地层沉积岩属于弱磁或无磁性层,且比较均匀。根据以往小比例尺航磁成果报告,侵入岩具有磁性且磁性较稳定,磁场图上呈平稳升高的磁场特征;而中新生代火山岩磁化率变化范围大,(如玄武岩磁化率均值(680~2 670)×4π×10-6SI、安山岩磁化率均值(155~3 410)×4π×10-6SI),磁场图上表现为杂乱异常特征。
断裂构造主要有两条,分别是NW向的蹲门口—长沙港断裂和NE向的栟茶断裂,但是栟茶断裂的位置及走向、展布等一直存在争议。
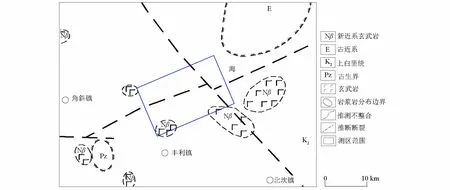
图3 江苏沿岸滩涂区构造及岩浆岩分布Fig.3 Structure and magmatic rock distribution map of coastal tidal flats in Jiangsu province
2.3 航磁局部异常及隐伏岩体
实验区的范围较小,磁场总体上呈北正南负的平稳场特征,夹杂呈规律排列的单点高值异常及洋口镇周边的杂乱高值异常。经地面查证,洋口镇周边的杂乱高值异常主要为洋口镇建筑物的反映,呈规律排列的C-2018-1至C-2018-7局部异常是由滩涂区及海域中的发电风车所引起。局部异常C-2018-8在航磁ΔT剖面图上呈线状微弱正异常,而在航磁ΔT化极水平总梯度模量图上表现为明显线状正负异常,推断该异常为发电风车向洋口镇输送电力的传输电缆所引起(图4)。
在洋口镇附近有温泉存在,由于温泉的形成与岩浆热液活动密切相关,并且根据1∶2.5 万区调报告记录该区西部分布有新近纪玄武岩,通过欧拉反褶积对磁性基底深度的计算(图5),共圈定C-2018-9至C-2018-12四处隐伏岩体,分析可能为玄武岩或中基性岩浆岩,最浅埋深约在2.1 km。
2.4 航磁推断地质构造
2.4.1 推断断裂构造
全区共推断断裂构造3条,以NW向为主,近似平行分布(图5)。推断断裂F1与已知的蹲门口—长沙港断裂所在位置基本一致,该断裂可能为苏北盆地和南黄海盆地的分界断裂,从地质资料分析,南黄海古近纪与新近纪深断陷盆地长轴为NW向,与苏北海岸平行方向还存在新近系800~1 200 m陡坡,该陡坡可能是古近纪及新近纪南黄海拉张盆地的边缘断裂,与南黄海中央断裂同期形成。苏北NW走向的海岸可能是这条断裂第四纪以来活动的反映。据徐映深等研究[14],沿该断裂地震明显呈带状分布,证实其为一条燕山晚期至喜马拉雅早期强烈活动,并在近期仍有活动的区域性断裂。
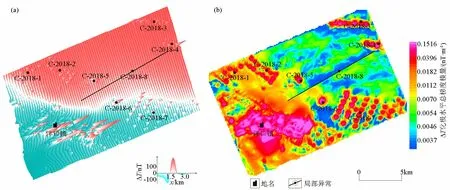
a—航磁ΔT剖面;b—航磁ΔT化极水平总梯度模量a—aeromagnetic section diagram on the left;b—overall modulus diagram of aeromagnetic pole level on the right图4 江苏沿岩滩涂实验区航磁从测量结果Fig.4 Aeromagnetic map of coastal tidal flats of Jiangsu Province
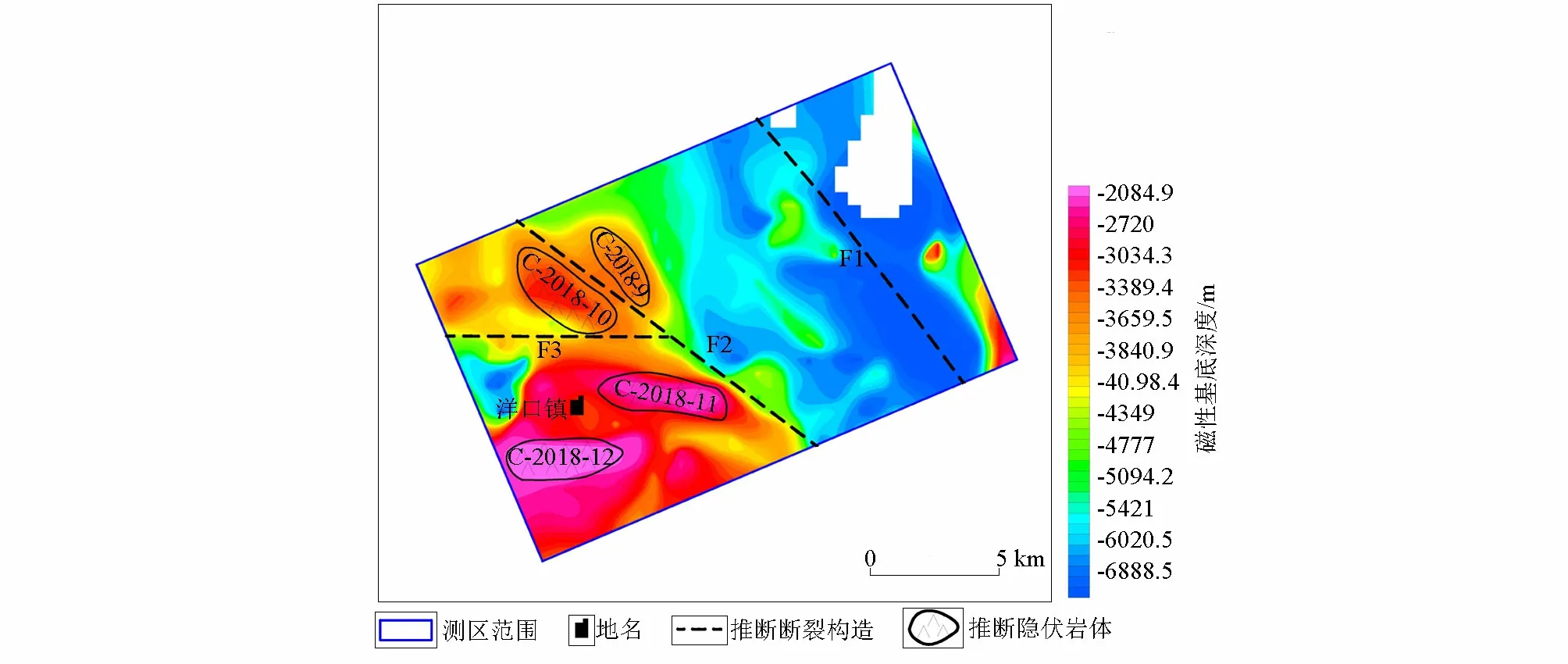
图5 江苏沿岸滩涂区磁性基底深度推断构造Fig.5 Inferred structural map of magnetic basement depth in beach area along Jiangsu coast
推断断裂F2具有明显的隐伏岩体线性截止带,断裂带以西磁性体分布密集,以东则明显减少。推断断裂F3的空间展布位置与该区的地热资源息息相关,可能为与栟茶断裂近似平行的分支断裂。
2.4.2 磁性界面分布
实验区内磁性界面深度由WS至EN方向逐渐变深,深度由约2.1 km逐渐过渡到7.3 km。洋口镇有温泉度假村,温泉的形成一般与岩浆热液活动有关,可能是底部有岩浆热液活动形成的中基性火山岩存在,同时由以往磁性推断结果也可验证,测区西南部为中基性火山岩分布区,这也是磁性界面较浅(2.1 km以浅)的原因(图5)。
3 结论
我国自主研发的无人机航磁测量系统近些年已经应用到了多种地形的测量之中,在地质填图、区域地质构造研究、矿产勘查以及圈定储油构造等方面取得了良好的地质效果,此次滩涂区的测量示范工作使得该系统得到进一步的改进和完善,同时扩展了该系统的应用领域。
3.1 技术
海事卫星和无线电双测控系统的实用化成功,标志着该系统具备了超远距离精准测控能力,可深入海洋、沙漠等测控车无法抵达的区域实现远距离、高精度的测量工作;航磁系统实现差分GPS定位数据同步采集和处理,达到5 Hz刷新率,有效提高大比例尺测量的定位精度;优化接口电路、测控软件和数据处理等软硬件,实现不同类型航空磁力仪搭载能力,提高系统集成灵活度,并可根据需要实现水平横向梯度测量。
3.2 应用
本次滩涂区测量实验工作采用1∶2.5万的大比例尺进行测量,测网疏密度250±3.8 m,一级动态噪声资料占比达93.66%,测量精度高。
航磁异常能有效圈定滩涂区地表发电风车位置,以及浅层输电线缆的埋藏位置;圈定隐伏岩体及其最浅埋藏深度;小面积测量可以推断断裂构造所在位置,以及磁性界面深度分布等。这些成果表明,该系统可以实现大比例尺、高精度的测量工作,可以为滩涂区提供基础地质、工程地质等资料,特别是准确获得磁性界面深度特征和浅部地层内人工开发利用信息,可广泛用于滩涂区开发利用、重要工程选址等用途。总之,本次滩涂区应用实验为今后该系统在沿海地区大规模应用积累了宝贵经验,为我国海岸带开发利用的基础调查工作增添了新手段。
