基于三维激光扫描仪的罗非鱼去鳞效果检测方法研究
2021-04-16张军文郑晓伟
张军文,郑晓伟
(中国水产科学研究院渔业机械仪器研究所,农业农村部远洋渔船与装备重点实验室,海洋食品精深加工关键技术省部共建协同创新中心,上海200092)
随着科学技术的进步和计算机技术的迅速发展,将日常现实生活的实体场景迅速转化为计算机能识别处理的数据早已实现,三维激光扫描技术就是其中的代表之一。三维激光扫描工作原理主要是采用非接触式高速激光测量技术和方法,利用激光测距的原理将被测物体的三维坐标、反射率和纹理等信息进行全面的测量,由此快速复测被测物体的三维模型及点、线、面、体等各种数据,且能将被测物体的三维坐标进行计算的一种科学测量技术。该技术能直接从物体本身出发,迅速进行逆向三维数据采集和模型重构。三维激光技术目前已在诸多领域得到了应用,但将该技术与罗非鱼体表去鳞率结合起来,在很多参考文献中几乎没有涉及。
我国罗非鱼养殖业发展迅速,产量在近年来已经占据世界总产量的“半壁江山”。但其“三去”(去头、去鳞、去脏)是影响罗非鱼工厂化加工的关键技术,而去鳞率是评价去鳞的重要参考指标,靠人工很难精准地进行客观评价,这就需要用到三维激光扫描技术进行辅助判断。
本文从三维激光扫描技术的原理出发,利用其扫描的点云数据重建罗非鱼的鱼鳞模型,并利用第三方软件(Proe)辅助进行去鳞率的统计计算,最后与人工测量的去鳞率进行比对分析。
一、材料与方法
1.试验平台
快速检测系统主要是由手持式三维激光扫描仪、控制系统、计算机、标靶点等组成。
2.工作原理
三维激光扫描仪主要由两部分构成,一是高速精确的激光测距仪,二是能引导激光并以一定恒定的角速度扫描的反射棱镜。当手持式三维激光扫描仪内的激光脉冲发射体发射激光,在同一时间内接受目标(罗非鱼表面的标靶点)的信号,通过计算脉冲发射和接受时间差,从而实现测距,编码器同时获得空间任一点的坐标。
3.三维激光扫描仪技术参数
试验平台使用双色激光手持式三维扫描仪,其采用红蓝激光双模的工作方式,测距方式采用脉冲方式测距,相关参数如表1所示。

表1 双色激光手持式三维扫描仪相关参数
4.试验数据采集
将试验用的罗非鱼体表贴上标靶点贴纸,贴纸两面都设有扫描靶点,如图1所示。三维扫描仪在靶点进行全景扫描,扫描速率采用48 000点/秒,扫描时间为6分钟,对罗非鱼所在平面内60°扫描;扫描后的模型共由2 217 236个小平面组成,导入第三方软件Proe。
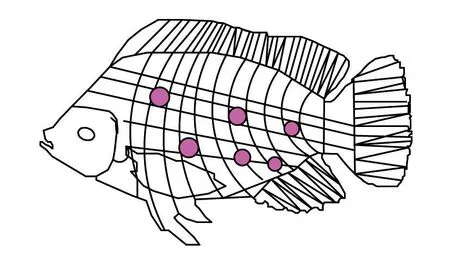
图1 贴标靶点的罗非鱼体示意
二、结果与分析
为了方便区分罗非鱼不同区域的鳞片去除情况,将鱼体表面有鳞体表划分为A、B、C、D、E、F和G共计7个区域,如图2所示。以透明方格纸覆盖鱼体的表面,测算各个区域被覆盖到的方格面积(每个方格边长为1.5厘米,面积为2.25厘米2),有鳞总面积为各个区域面积之总和。罗非鱼体表鳞片的分区面积及其占比人工实测结果如图3所示。依据现场分析以及结合过去对鱼机械去鳞试验的情况,D、F和G区域的鱼鳞是比较容易去除干净的,A区域的鱼鳞能够去除一部分,但不会去除很干净,B、C和E区域的鱼鳞很难去除。鱼鳞难以去除的主要原因是鱼体的腹鳍、臀鳍、尾鳍和背鳍等的干扰,以及局部区域分布的是细小鱼鳞,其结合力较大,机械部件很难接触该部分区域,导致鱼鳞难以去除干净。
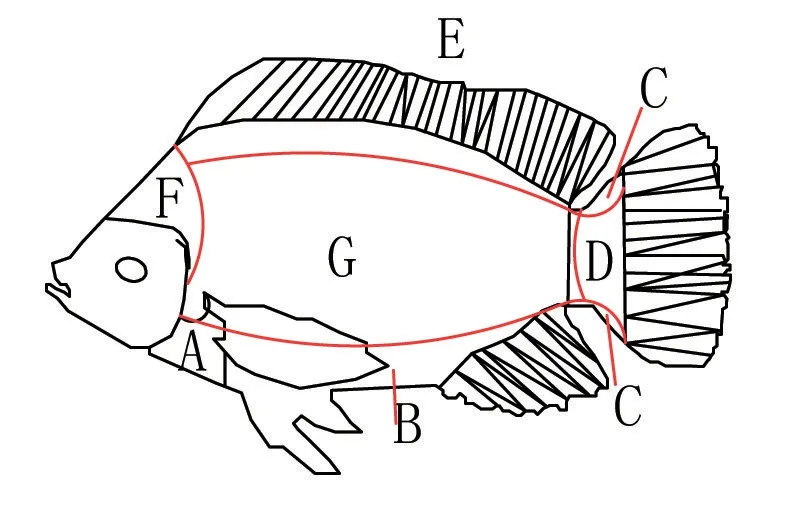
图2 罗非鱼鳞片区域划分示意
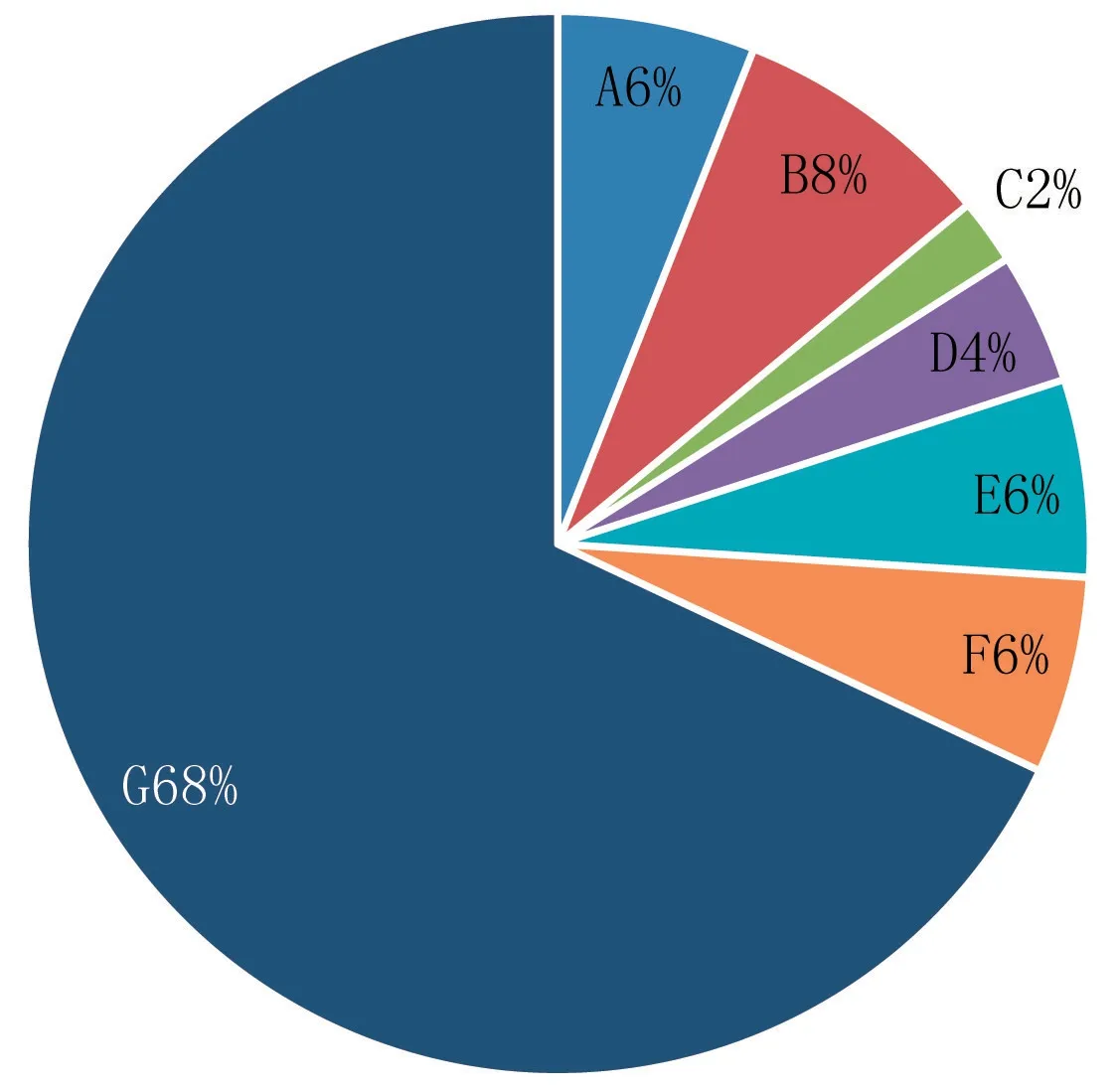
图3 罗非鱼鳞片分布占比
利用Proe中自带的测面积法对划分区域进行面积测算,比较难以去除鱼鳞的B、C和E区域合计占比为16%。比较容易去除鱼鳞的D、F和G区域合计占比为78%。
为了检测三维激光软件测量的真实误差极限,选取了标准长度物体进行了对照测量。在此次试验中,将钢直尺截成不同的标准长度,进行标记识别测量。测量结果显示,随着基准值的增大,绝对误差值也随之增加,但是增加幅度不趋向一致,这可能与三维激光镜头固有的非线性畸变有关;其误差均值为0.49%,这可以满足对罗非鱼鱼鳞参数的测量要求。试验选取了罗非鱼7个不同区域的鱼鳞进行软件标记测量和人工坐标纸测量的对比(表2),结果显示罗非鱼鱼鳞的实际测量相对误差的均值(4.19%)大于标准规格的相对误差的均值(0.49%)。这是由于三维激光对鱼鳞区域进行测量时,存在鱼鳞区域部分不易区分和图像边缘模糊等因素,从而增大了误差数值。尽管误差均值有所增大,但其误差值依然能够满足测量对罗非鱼鱼鳞区域的误差要求。
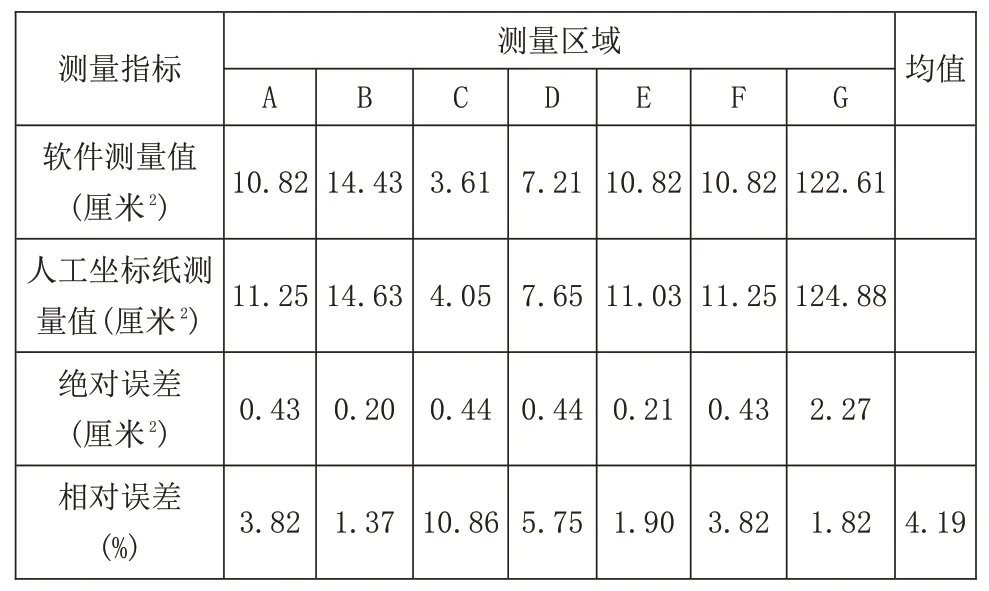
表2 软件标记测量和人工坐标纸测量对比
三、小结
罗非鱼体表的鳞片检测对机械化去鳞和去鳞设备改进等都具有重要意义。本文利用三维激光扫描仪对罗非鱼体表7个区域进行扫描,利用其扫描的点云数据,重建罗非鱼鱼鳞模型,利用第三方软件(本文用的是Proe)辅助进行去鳞率的统计计算,并与人工测量的去鳞率进行比对分析。试验结果表明,三维系统的测量误差均值为4.19%,该误差值能够满足测量对罗非鱼鱼鳞区域的误差要求。该三维激光扫描系统具有多参数快速、同步测量、快速成像等特点,方便实用;可以替代人工进行鱼体的表面积等测量,且该系统也为各类鱼外部形态参数检测提供一种有效、便捷的新方法和新思路。

