火星轨道器次表层探测雷达数据处理技术与现状研究*
2021-04-15洪天晟王瑞刚刘晨迪李春来
洪天晟,苏 彦,王瑞刚,戴 舜,刘晨迪,李春来
(1. 中国科学院国家天文台,北京 100101;2. 中国科学院月球与深空探测重点实验室,北京 100101;3. 中国科学院大学,北京 100049)
火星是太阳系中的类地行星之一,相比同为类地行星的水星、金星,火星在大气、地貌等方面与地球相似度较高,是太阳系内与地球相似度最高的行星。从人类进入航天时代开始,火星就是最重要的地外天体探测目标之一,美国、前苏联等国家总计进行了45次火星飞越、绕飞、着陆和巡视的探测尝试[1],仅次于对月球的124次。火星探测的第1次高峰出现在1960~1975年,在此期间水手4号、6号、7号对火星进行了飞越探测,近距离拍摄火星,为人类提供了火星表面的清晰图像。水手9号首次完成了对火星的绕飞探测,而海盗1号、2号在火星表面完成了软着陆[2],同期前苏联也发射了多个探测器进行火星探测[3]。1992年之后,火星探测再次迎来高峰,火星快车、火星勘测轨道飞行器、火星全球勘测者(Mars Global Survyor, MGS)、凤凰号着陆器、勇气号、机遇号和好奇号火星车等探测器都抵达火星开始探测任务,对火星进行了多波段光学遥感、雷达次表层探测、着陆巡视等多种方式的探测,绘制了火星表面的地貌细节、矿物分布、表面亮温分布,对火星次表层结构进行了研究,在火星上寻找液态水及其存在过的证据。
火星表面的一系列探测结果表明,火星表面曾经有液态水存在,而在火星南极冰盖进行的次表层探测甚至为液态水的存在提供了直接观测证据,欧洲航天局(European Space Agency, ESA)火星快车探测器上搭载的火星次表层和电离层先进探测雷达于2012年至2015年在火星南极冰盖区域采集到的数据显示,冰盖表面下1.5 km处存在宽度达20 km的液态水湖[4]。火星上存在不同状态的水这一发现激发了人类寻找火星生命存在痕迹的热情。
在火星上搜索各种形态水的存在以及生命痕迹的过程中,轨道器次表层探测雷达发挥了极大作用,与车载次表层探测雷达相比,星载雷达最大的特点是使用了合成孔径技术,通过对图像进行顺轨方向的处理,在离地面数百千米的高度上仍能取得较高的方位向分辨率。轨道器次表层探测雷达的探测深度可达数百米甚至几千米,但分辨率较低,一般为数十米。目前只有欧洲航天局2003年发射的火星快车探测器和美国航空航天局2005年发射的火星勘测轨道飞行器上搭载了此类仪器,分别为火星次表层和电离层先进探测雷达与浅表层雷达。目前,在我国嫦娥探月工程中大放异彩的车载次表层探测雷达还没有随火星车或者着陆器登陆火星开展相应的次表层探测。
我国首次火星探测任务已于2016年正式立项,2020年7月23日于海南文昌发射场由长征5号运载火箭发射,探测器包括轨道器和巡视器[5],上面搭载了次表层探测雷达。美国Mars 2020任务探测器于2020年7月30日由Atlas V 541火箭在卡纳维拉尔角空军基地发射升空,阿联酋的火星探测任务希望号探测器于2020年7月20日由H-IIA火箭在种子岛航天中心发射升空,欧洲与俄罗斯的联合火星探测任务ExoMars原定于2020年发射,由于疫情等多种原因推迟至2022年,火星探测又将迎来一次高峰,Mars 2020任务和ExoMars任务的巡视器都搭载了车载次表层探测雷达。如果各国的探测器能顺利抵达火星展开探测,如何处理、分析、解读火星次表层探测雷达的数据将成为火星次表层探测的一大重点、难点。本文综述了国内外利用雷达探测技术进行火星次表层探测的发展成果与技术进展,对未来更好地利用火星探测任务提供的雷达数据有一定意义。
1 火星次表层探测雷达技术进展
雷达发射的电磁波穿透力强,且不依赖于光照,具有全天性,在月球的次表层探测中发挥了很大作用,1972年搭载于阿波罗17号的阿波罗月球探测仪,2007年日本月亮女神(SELenological and ENgineering Explorer, SELENE)搭载的月球雷达探测仪以及嫦娥三号、四号月球车上搭载的测月雷达都对月球进行了次表层探测,并在澄海、危海和雨海等地探测到了次表层分层结构[6],嫦娥三号月球车 “玉兔” 与嫦娥四号月球车 “玉兔二号” 都搭载了配置相同的月球穿透雷达(Lunar Penetrating Radar, LPR),工作频段为40~80 MHz和250~750 MHz,最大探测深度超过100 m,并拥有优于1 m的距离分辨率,在巡视路线上对月球进行次表层和月壤结构探测[7]。嫦娥三号搭载的雷达在月球雨海的巡视区展开探测,根据探测结果估计风化层深度为4~6 m,并确定约330 m深处存在月岩层[8]。嫦娥四号搭载的雷达在月球背面的冯卡门撞击坑获得了远深于嫦娥三号着陆区的探测深度,并探明巡视区的3个次表层分层结构:风化层(深度12 m)、嵌入岩石的粗糙材料(深度12~24 m)以及粗糙与精细物质的交替层(深度24~40 m)[9]。火星探测距离远,能量需求大,难度较高,早期的火星探测一直以光学为主,雷达应用较少。目前,地基雷达和轨道器次表层探测雷达已正式应用于火星探测,已登陆火星的巡视器上都没有搭载次表层穿透雷达,我国的火星车次表层探测雷达与美国Mars 2020任务巡视器毅力号(Perseverance)火星车搭载的火星次表层实验雷达成像仪(The Radar Imager for Mars subsurface eXperiment, RIMFAX)中将诞生第1台登陆火星的车载次表层探测雷达。
地基雷达探测是雷达技术应用于火星探测的最初方式,观测设备为位于美国波多黎各的阿雷西博(Arecibo)305 m射电望远镜以及位于美国加利福利亚的金石(Goldstone)70 m射电望远镜[10-11]。地基雷达观测基于随机长编码延迟-多普勒技术以及干涉延迟-多普勒技术[10],在火星冲日时对火星表面进行观测,获取火星表面的高程、反射率、粗糙度等信息,并进行表面物质的介电常数反演。
由于火星快速自转,入射的电磁波会因多普勒效应发生严重的频率偏移,大大提高了探测难度[12],且地基雷达探测技术无法进行次表层探测。在火星探测进入绕飞与着陆探测阶段后,地基雷达探测更多发挥着陆区选取等辅助功能。
火星探测确立了在火星次表层寻找不同形态的水的科学目标后,次表层探测的需要推动了次表层探测雷达技术的发展,并逐渐在火星探测器的载荷中占有越来越重要的地位。目前,火星次表层探测雷达已获取了基本覆盖火星全球的探测数据,并识别出一些水冰存在的区域。
1.1 轨道器次表层探测雷达
次表层探测雷达能穿透火星地表,深入火星次表层进行探测。雷达发射的电磁波能够在一定程度上穿透土壤、冰、岩石等介质,并在两种介电常数不同的界面上发生反射、散射和透射,这个特点可以帮助雷达探明探测区域的地质结构,比如干燥的土壤与冰层的界面、冰川与基岩的分层、孔隙中充满冰或液态水的多孔岩石以及冰盖下的液态水等。电磁波在各种介质中并非无损耗传输,在穿越介质时由于介质吸收而发生衰减,介质对电磁波的吸收能力一般与这种介质的介电常数和电磁波的波长有关,波长越长、频率越低的电磁波在同种介质中传播时衰减的程度越小,穿透能力越强,能探测到更深处的地质结构。因此,次表层探测雷达工作频率一般在1 MHz~1 GHz之间,而雷达的带宽决定了分辨率,带宽越小,深度上的分辨率越高。为了实现高精度次表层雷达探测,并满足探测深度的要求,雷达的工作参数设计受到很多限制。火星次表层和电离层先进探测雷达在次表层探测模式下的工作频段为1.3~5.5 MHz,划分为4个子频段,每个频段带宽为1 MHz,分别为1.3~2.3 MHz、2.5~3.5 MHz、3.5~4.5 MHz和4.5~5.5 MHz,真空中波长范围为55~230 m;浅表层雷达的工作频段为15~25 MHz,带宽10 MHz,波长范围为12~20 m。火星次表层和电离层先进探测雷达与浅表层雷达由于工作参数的差异,分辨率、探测深度等性能参数也存在一些区别(见表1)。
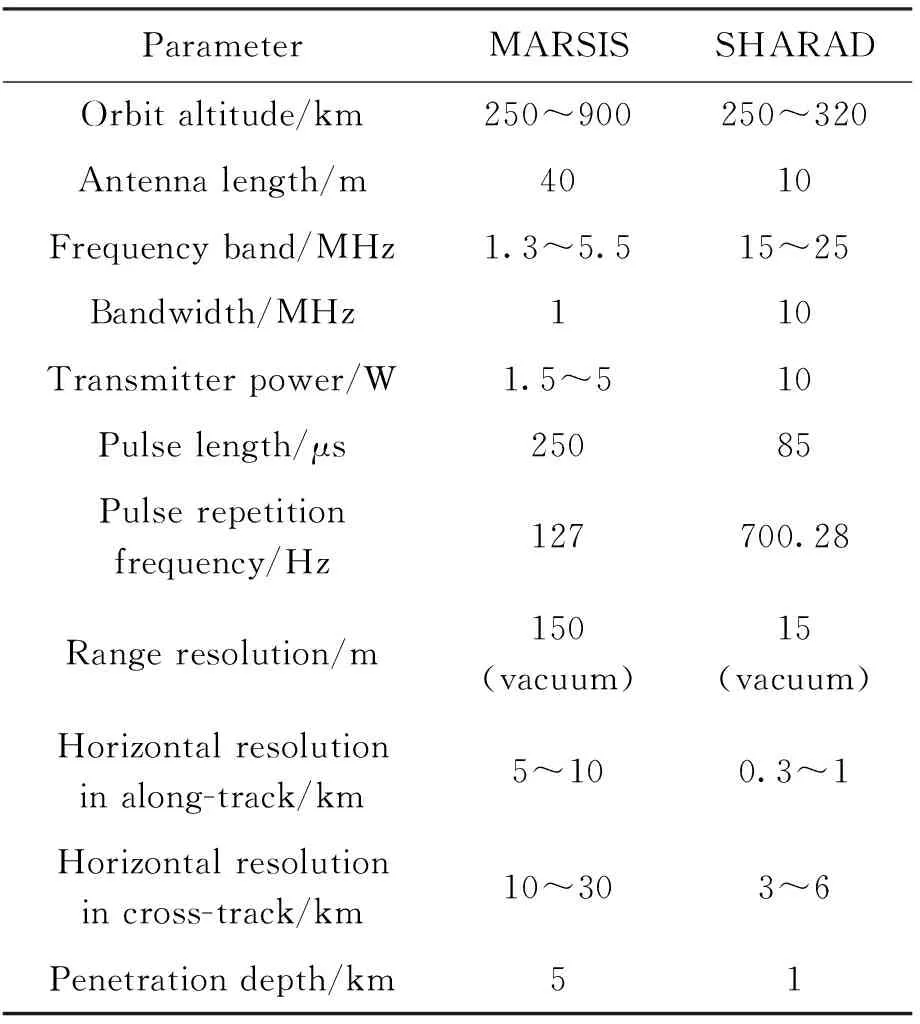
表1 火星次表层和电离层先进探测雷达与浅表层雷达关键性能参数[13-17]Table 1 Main performance parameters of MARSIS and SHARAD [13-17]
1.2 轨道器次表层探测雷达原理
在次表层探测中,电磁波从环绕器上安装的天线发射,穿越火星的大气层,其中电离层对电磁波的幅度和相位产生一定影响,随后电磁波抵达火星表面,一部分电磁波被表面反射、散射,最终由雷达天线接收,还有一部分穿透火星表面进入次表层,穿透介质,在介电常数不同的次表层分层界面处发生反射。假设轨道器的轨道高度为H,真空中的光速为c,则在发射电磁波后时延t0=2H/c时接收到来自星下点火星表面的回波。穿透地表进入次表层的电磁波由于介质的存在,以小于真空中的速度v=c/n传播(n为介质的折射率),假设两个介电常数不同的分层界面深度为h,则来自这个界面的回波抵达天线的时间为t0+2h/v(见图1(a), (b))。由于雷达的波束宽度较宽,覆盖的地表面积较大,表面回波除了星下点表面反射回波还包括星下点外表面散射杂波,表面杂波存在一定的时间延迟,可能与星下点次表层回波信号重合,因此,星下点次表层回波信号经过介质衰减可能被表面杂波淹没,为了在表面杂波存在时有效识别次表层回波(见图1(c)),必须对回波进行脉冲压缩,且旁瓣要远低于主瓣才能实现次表层探测。
由于雷达安装在环绕器上,与探测目标的距离至少为轨道高度,按照雷达分辨理论,雷达的方位向分辨率为Hλ/2D,在次表层探测雷达的运行环境下,方位向分辨率将达到数十千米,要提高雷达的方位向分辨率只能通过增大雷达天线的口径,但在太空中这种要求是不切实际的。次表层探测雷达都采用合成孔径技术,将在不同时刻发射、接收的电磁波等效为在同一时刻发射、接收,即合成为
电磁波从发射机通过天线发射,穿越电离层,被目标反射后再次穿越电离层,最终被雷达接收,这个过程在仿真中可以认为是理想的。实际上,天线和接收通道会对电磁波的幅度和相位产生影响,电离层造成的相位失真严重影响成像质量,为了保证雷达的成像精度和次表层探测的效果,必须对上述过程的幅相失真进行校正。
1.3 轨道器次表层探测雷达数据处理流程与方法
合成孔径雷达数据处理过程一般可以分为距离向处理和方位向处理(或多普勒处理)。在火星次表层和电离层先进探测雷达与浅表层雷达的数据处理流程中,火星次表层和电离层先进探测雷达较常用的次表层探测三模式(Subsurface 3, SS3)选择在星上完成方位向处理后下传,再在地面完成距离向处理;浅表层雷达的原始数据在星上完成相关预叠加后,先进行距离向处理,再进行方位向处理,其中还包括对电离层带来影响的校正,使用的方法有所不同。
1.3.1 距离向处理
合成孔径雷达数据处理中,距离向处理的操作为脉冲压缩,将接收的回波信号通过匹配滤波器,将回波信号与发射信号进行相关处理,这种操作能使得来自地面或次表层界面的回波时宽变窄,回波能量也集中到该时间点。火星次表层和电离层先进探测雷达与浅表层雷达进行脉冲压缩的操作在细节上有一些不同,前者的脉冲压缩流程为:
(1)对回波信号进行一次快速傅里叶变换,点数为512;
(2)对作为参考信号的线性调频信号进行傅里叶变换,求得频谱,再进行共轭变换;
(3)将(1)、(2)得到的回波信号频谱与参考信号频谱共轭相乘,进行逆傅里叶变换得到脉冲压缩结果[15]。
由于天线与收发通道、电离层造成的幅相变化,如果使用理想的线性调频信号作为参考信号,则其与回波信号的相位无法完全匹配,影响脉冲压缩的效果。因此,火星次表层和电离层先进探测雷达使用的参考信号是由理想线性调频信号与在仪器定标中测得的幅相失真推导得到的,并根据电离层失真对参考信号进一步调整。此外,为了降低脉冲压缩后出现的旁瓣,火星次表层和电离层先进探测雷达使用汉宁窗(Hanning)对参考信号进行加窗处理,加窗可以降低脉冲压缩的旁瓣,但也会导致主瓣展宽。
浅表层雷达探测数据下传后通过两种不同的数据处理流程完成距离向脉冲压缩,第1种流程的参考信号基于天线匹配网络定标时测得的信号幅度,测得的定标数据为接收机与发射机温度的函数。使用定标数据得到的参考信号完成脉冲压缩后,再使用相位梯度自聚焦算法(Phase-Gradient Autofocusing, PGA)进行电离层校正。第2种流程选择使用线性调频信号频率分量的等幅模型,结果是脉冲压缩后旁瓣出现不对称偏置,时延较大的旁瓣幅度较大,选择这种方法是因为可以在脉冲压缩完成后保持两倍的过采样率,有利于在接下来的处理中进行插值。两种处理流程都选择了汉宁窗对数据进行加窗以减小旁瓣。在进行电离层校正时,第2种流程使用了一种频率决定的相位误差模型,这种模型给出的校正项与总电子含量(Total Electron Content, TEC)接近线性相关,因此与来自地表和次表层回波信号时延的改变量相关,这种技术适用于探测时太阳天顶角小于100°获得的图像。
1.3.2 方位向处理
方位向处理是合成孔径雷达技术的关键与难点,不同处理方法的处理量也不同。次表层探测雷达的方位向处理方法与普通合成孔径雷达的方位向处理方法在原理上是相同的,因此次表层探测雷达数据处理使用的方位向处理算法是在常见的合成孔径雷达算法的基础上产生的。比较常见的合成孔径雷达方位向处理算法包括线性调频变标(Chirp Scaling, CS)算法[18]、波数域(ωk)算法[18]、距离-多普勒(Range-Doppler, RD)算法[19]、后向投影算法(Back-Projection, BP)[20]等,如果对数据进行非聚焦成像,则可以选择多普勒波束锐化算法[17]。
距离-多普勒算法在20世纪70年代末应用于合成孔径雷达成像,至今仍在广泛使用。距离-多普勒算法的基本实现方法是对雷达回波数据矩阵进行距离向脉冲压缩,然后对数据进行方位向傅里叶变换,将数据转换到方位向频域,并用sinc函数进行距离插值,完成距离徙动校正,将距离徙动曲线拉直到与方位向频率轴平行的方向,最后进行方位向压缩完成成像。这种算法通过距离向与方位向的频域处理,所有操作在一维频域内进行,简便高效,但由于校正距离徙动需要插值操作,对长孔径合成孔径雷达成像的处理精度有限,且运算量较大。线性调频变标算法避免了插值操作,基于线性调频变标原理,通过相位相乘代替时域插值以完成距离徙动校正,并将所有信号的距离徙动分为补余距离徙动与一致距离徙动,即将距离徙动分解出一致的部分(一致距离徙动),二者的差为补余距离徙动。线性调频变标算法的处理流程是首先将数据进行方位向傅里叶变换,用相位相乘补偿补余距离徙动,然后进行距离向傅里叶变换,将数据变换到二维频域,与参考函数相位相乘,完成距离压缩、二次距离压缩以及一致距离徙动校正,接下来进行距离向傅里叶逆变换、方位向压缩和方位向傅里叶逆变换,最终成像。还有一种波数域算法在处理宽孔径或大斜视角数据上具有独特的优势,这种算法使用二维傅里叶变换将数据变换到二维频域,并乘上参考函数,使参考距离上的目标全聚焦,其他目标部分聚焦,接下来Stolt插值完成其他目标的聚焦,将数据变换回时域[18]。这些算法有各自的优势与缺陷,适应于不同的雷达成像场景,因此算法的选择需要结合雷达数据的具体情况进行分析。
浅表层雷达选择线性调频变标算法,将方位向回波的多普勒频移进行分解,将距离徙动划分为不随距离变化的一致距离徙动与随距离变化的补余距离徙动,在处理过程中分别进行校正。这种算法只需要快速傅里叶变换与复乘就能完成[15],计算量较小,使用简单。具体的处理流程为:(1)计算距离徙动,将每道数据的每个时延位置点相对物理孔径中心的距离进行排列;(2)方位压缩,用环绕器的轨道高度、径向速度、切向速度确定每个回波数据的差分相位,校正相位可以表示为整个带宽的频率的函数,但实际操作中使用最大工作频率(25 MHz)可以达到最佳的聚焦效果;(3)完成相位校正后,对完成距离徙动校正的 “等时延线” 进行傅里叶变换,取所得频谱的幅值即为一列雷达图像,使用汉宁窗在方位向上压低旁瓣,在顺轨方向每460 m约有128列图像。如果多普勒频域的单位频宽比一个频率分辨单元更宽,则可以进行多视处理。
火星次表层和电离层先进探测雷达选择的合成孔径处理算法为多普勒波束锐化,与浅表层雷达的线性调频变标算法有巨大区别,在完成对轨道器垂直方向的运动补偿后进行,可以补偿轨道器除垂直方向以外的其他方向运动产生的相位。这是一种非聚焦合成孔径技术,获得的图像方位分辨率较低,但计算量相对较小,处理方法为将一帧图像内的所有同频率的回波叠加,对相位进行调整完成相关性叠加。一帧图像中包含在一个合成孔径时间内接收的回波信号,由工作频率/波长以及雷达高度决定。经过叠加的回波信号为一个多普勒滤波器,多普勒滤波器可以在接下来的处理中由地面控制选择前表面反射法或对比法,对孔径中心的多普勒滤波器(第0多普勒滤波器)进行电离层相位校正,校正结果可以用于更正距离压缩中的参考函数(见图2)。
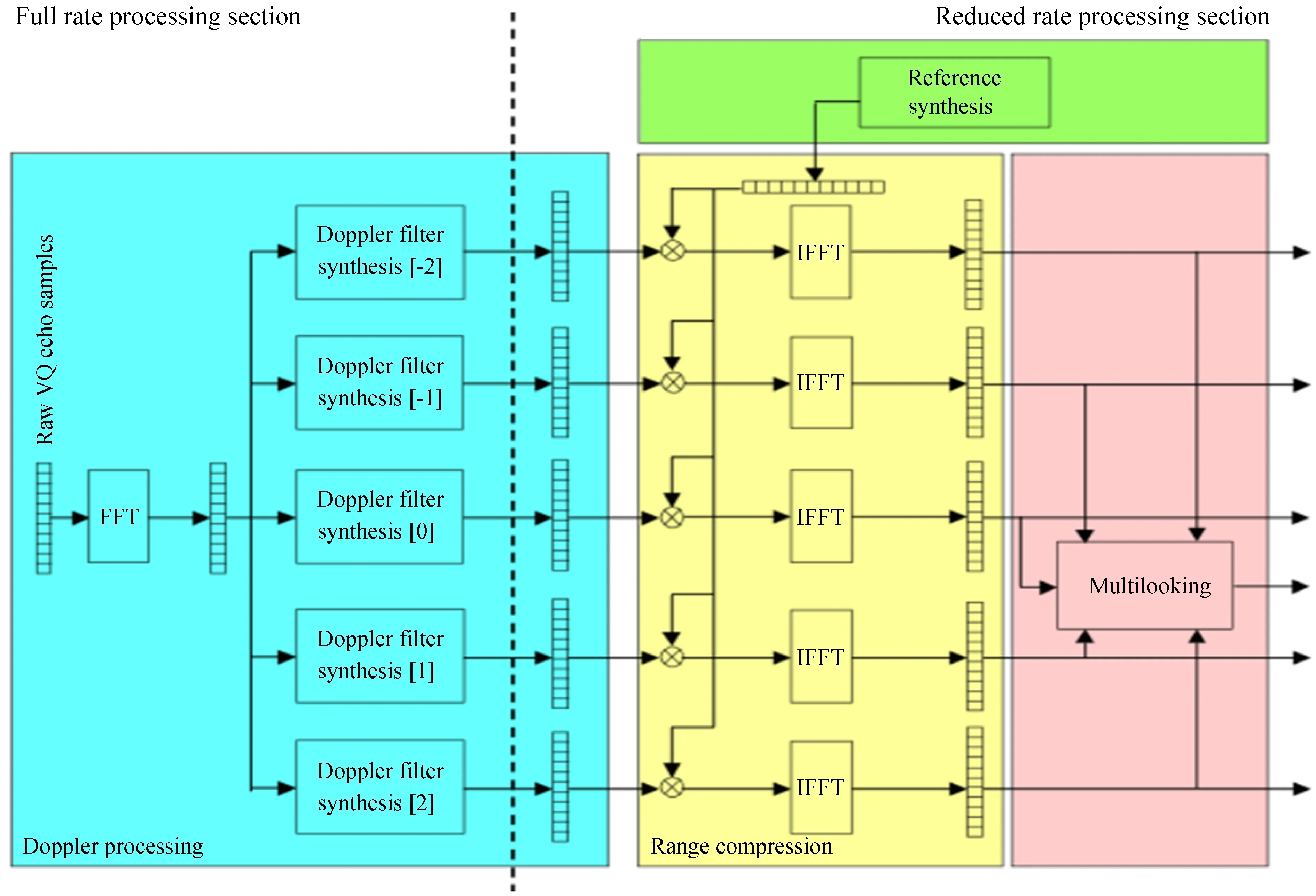
图2 火星次表层和电离层先进探测雷达多普勒(方位)向处理与距离向处理流程图[15]Fig.2 MARSIS range processing and Doppler processing flow diagram [15]
我国首次火星探测任务天问1号的环绕器次表层探测雷达(Mars Orbiter Subsurface Investigation Radar, MOSIR)在数据处理流程设计的过程中,为实现星上实时成像,使用了后向投影算法作为方位向数据处理算法,而对于下传的原始数据,在地面采用何种方法进行处理,需要结合数据的实际情况,选择成像效果最好、距离徙动计算最准确的方法。
1.3.3 电离层校正
火星次表层和电离层先进探测雷达次表层探测的工作模式与火星电离层等离子体频率非常接近[16],因此电离层对回波时延以及幅度、相位的影响不可忽略。在最初的处理中,研究人员提出了两种校正算法,分别为前表面反射法和对比法,文[17]使用对比法完成电离层校正,校正效果见图3。对比法通过对电离层相位误差的泰勒展开式中影响较大的系数进行估计以完成校正,并求得电离层总电子含量,对回波进行迭代脉冲压缩,在每次脉冲压缩时对回波信号施加估计的相位误差校正项,估计相位误差使用的参数步长由发射的线性调频信号以及回波信号的调频率决定,直到校正精度满足要求,校正后的回波信号能量集中程度最高,此时,根据完成校正所得的泰勒展开式系数可以计算电离层总电子含量[21]。
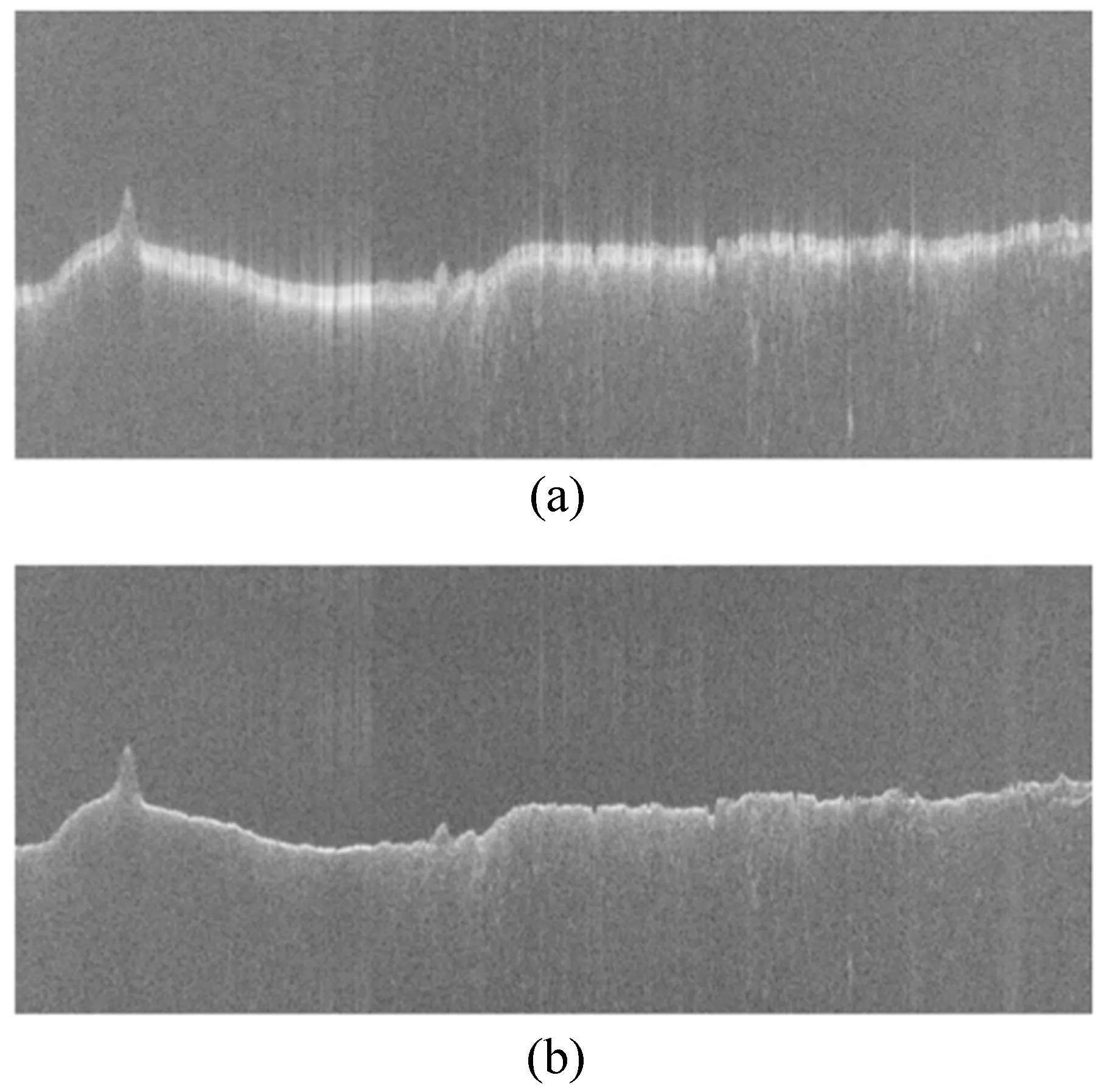
图3 (a)未校正电离层失真的火星次表层和电离层先进探测雷达第5 017轨雷达图像;(b)使用对比法进行电离层校正后的图像[17]Fig.3 Radargram for orbit 5 017 before (a) and after (b) use of the contrast method to correct ionospheric distortion [17]
浅表层雷达的工作频段较高,而火星电离层的等离子体频率一般为几兆赫兹,频率高于电离层等离子体频率的电磁波在穿越电离层时发生衰减,信号传播时间出现群延迟。在浅表层雷达的星上处理过程中,相位梯度自聚焦算法用于校正电离层带来的相位误差,在火星次表层和电离层先进探测雷达的后期数据处理中,这种算法作为对比法的补充[22]。相位梯度自聚焦算法可以同时对电离层以及其他因素造成的相位误差进行估计,具体操作需要选取特显点,即含有较高能量且未经补偿的帧,利用散焦图像中相位误差的冗余信息对相位误差的梯度进行鲁棒估计,一般需要经过圆移(将特显点移至方位中心)、加窗和相位梯度估计,最后进行迭代校正,完成整个校正过程。需要注意的是,相位梯度自聚焦算法的校正效果与特显点的选择有很大关系,如果选取的特显点相位误差泰勒展开式中影响较大的系数不稳定,校正效果会被削弱。
1.4 火星次表层和电离层先进探测雷达与浅表层雷达成像结果对比
从火星次表层和电离层先进探测雷达与浅表层雷达的工作参数以及理论探测能力可以看出,前者的工作频率低,带宽窄,波长长,且合成孔径处理采用非聚焦的多普勒波束锐化算法;后者的工作频率较高,带宽宽,波长短,使用线性调频变标算法进行合成孔径处理。因此,火星次表层和电离层先进探测雷达的探测深度较深,可以探测到距地表3 km的次表层界面,浅表层雷达接收的来自相同深度的回波太弱以至于被背景噪声淹没而无法探测,但火星次表层和电离层先进探测雷达的探测精度无论是距离分辨率、顺轨分辨率还是交轨分辨率都明显小于浅表层雷达,尤其是距离分辨率,浅表层雷达的理论距离分辨率只有火星次表层和电离层先进探测雷达的十分之一。火星次表层和电离层先进探测雷达与浅表层雷达在相同区域的探测图像可以作为互补资料,根据火星次表层和电离层先进探测雷达探测数据在较大尺度上绘制探测区域的图像,确定有精细探测价值的目标区域,再利用浅表层雷达的数据对该区域火星地表以下数百米可能存在的次表层结构进行高分辨率成像。
文[15]对相近区域的火星次表层和电离层先进探测雷达与浅表层雷达成像进行了比较,火星次表层和电离层先进探测雷达第3 749轨与浅表层雷达第2 026轨探测区域非常接近,两部雷达对火星相同区域成像的效果如图4[15],由图4可以看出,浅表层雷达对距地表回波约7 μs(约数百米深处)的次表层界面成像清晰,能反映次表层较精细的结构,但探测深度比火星次表层和电离层先进探测雷达浅,实际成像质量与理论计算的探测精度相符。
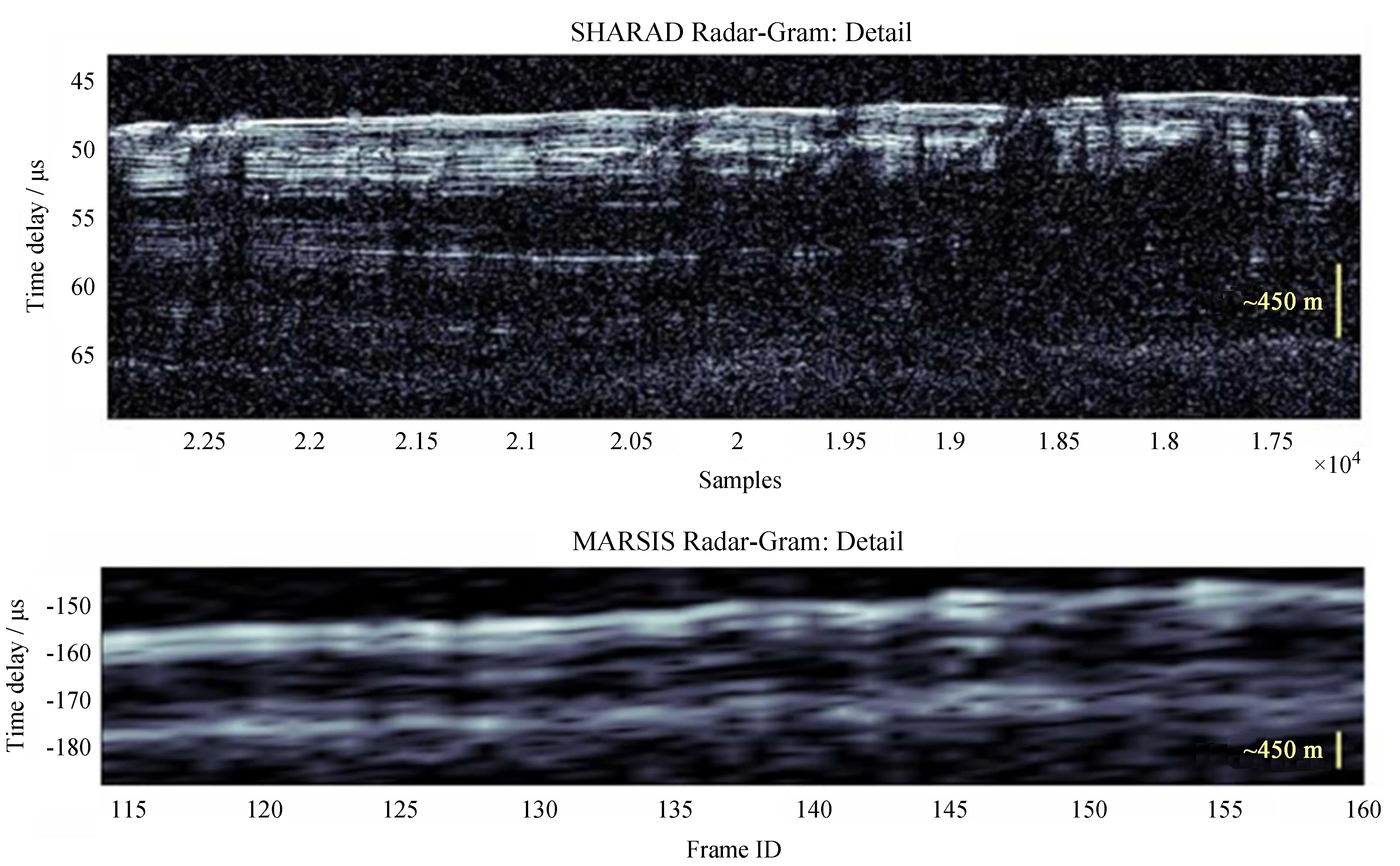
图4 火星次表层和电离层先进探测雷达第3 749轨与浅表层雷达第2 026轨探测区域重合部分图像比较[15]Fig.4 Comparison between MARSIS radargram orbit 3 749 and SHARAD radargram orbit 2 026 on the same Mars area [15]
1.5 研究现状
火星次表层和电离层先进探测雷达与浅表层雷达运行近20年来,基本实现了对火星全球的覆盖,截至2019年仍在发布数据,研究人员根据发布的数据完成成像处理后,使用搭载在火星全球勘探者号探测器上的火星轨道激光高度计(Mars Orbiter Laser Altimeter, MOLA)获得的高精度火星表面高程数据(空间分辨率接近1°,绝对精度达到13 m[23]),建立探测区域火星表面地形模型,仿真雷达接收的表面杂波,筛除与次表层回波发生混杂的表面杂波[24-25]。获得次表层回波后,结合周边的地形情况,设计多种方法反演火星表层、次表层物质的介电常数、衰减系数和次表层界面深度等科学信息,推测火星表层和次表层的物质成分,获得了众多高价值的研究成果,以此为依据提出了关于火星的气候、地质和轨道等历史演化的一系列推论。
火星北极高原是火星次表层和电离层先进探测雷达的首个探测区域,覆盖了火星北极周边直径约600 km的面积,主要成分为水冰与少量尘埃,由3个地质单元组成:北方残余冰盖(Northern Residual Ice Cap, NRIC)、北极层状沉积(North Polar Layered Deposit, NPLD)和基底层(The Basal Unit)。文[26]利用火星次表层和电离层先进探测雷达早期中心频率为3 MHz和5 MHz在第1 855轨的探测数据,获得了从北部平原穿过层状沉积边缘进入北极层状沉积区域的雷达图像,图像显示表面反射回波分裂成两个强反射回波,使用火星轨道激光高度计数据对探测区域表面回波进行仿真,排除了较低的反射回波是由表面杂波导致的可能性,即说明反射回波来自次表层分层界面(见图5)。两个反射回波之间的时延以及相对回波强度说明基底上覆盖物质的介电常数和损耗角正切与纯水冰的介电特性相符,用纯水冰的介电常数(~3)将时延转换为深度,发现反射体的深度与北极层状沉积高于周围地区的高度大致相等,为1.8 km,说明北极层状沉积下的次表层界面仍与周边地区的平原平齐,没有向下弯曲,证明了非常厚的弹性岩石圈的存在,也表明壳幔温度梯度较低。
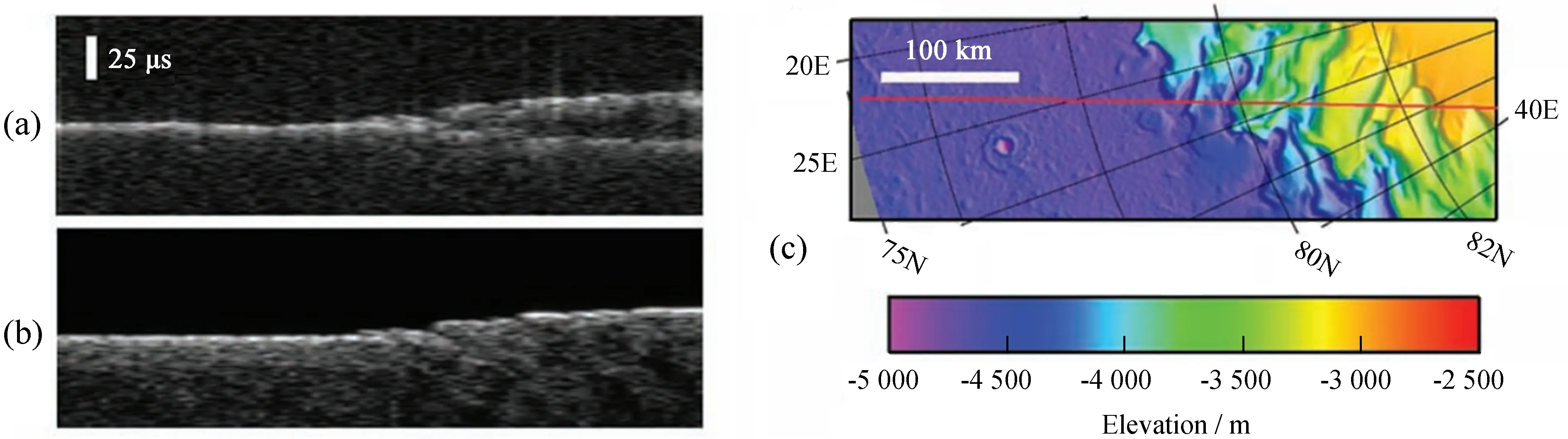
图5(a)第1 855轨火星次表层和电离层先进探测雷达探测数据(轨道从周边地区进入北极层状沉积);(b)使用火星轨道激光高度计数据模拟的火星次表层和电离层先进探测雷达探测到的表面回波(包括星下点回波以及星下点外的杂波);(c)沿火星快车探测器星下点轨迹绘制的火星轨道激光高度计数据地形图[26]Fig.5(a) MARSIS data from orbit 1 855 as it crossed the margin of the NPLD and came into the NPLD; (b) Simulated MARSIS data if echoes are only from the surface(nadir and off-nadir clutter); (c) MOLA topography along the ground track (red line) of the Mars Express sub-satellite point[26]
南极高原与北极高原相似,也由3个主要地质单元组成:南方残余冰盖(Southern Residual Ice Cap, SRIC)、南极层状沉积(South Polar Layered Deposit, SPLD)和阿詹泰山脊构造(Dorsa Argentea Formation, DAF),南方残余冰盖表面覆盖着数米厚的干冰,具有较高的反照率,南极层状沉积的结构与北极层状沉积相似。
文[27]根据火星次表层和电离层先进探测雷达第2 753轨的数据发现,星下点在通过南极层状沉积边缘时,也出现了表面回波分裂成两个反射回波的现象,且较低的回波使用水冰的介电常数将时延换算为深度后,次表层分层界面符合南极层状沉积周边地区表面地形的延伸,该界面被认为是南极层状沉积的富冰材料与以岩屑为主要成分的基底的分界,火星次表层和电离层先进探测雷达在南极层状沉积的大部分区域探测到了这个界面。从图6可以看出,次表层界面回波的幅度很大,甚至在某些区域(如第2 682轨)次表层界面回波强于表面回波,这说明南极层状沉积的成分具有极低的衰减系数,损耗角正切约为0.001~0.005,可以由此推测南极层状沉积中水冰的含尘量在0%~10%。
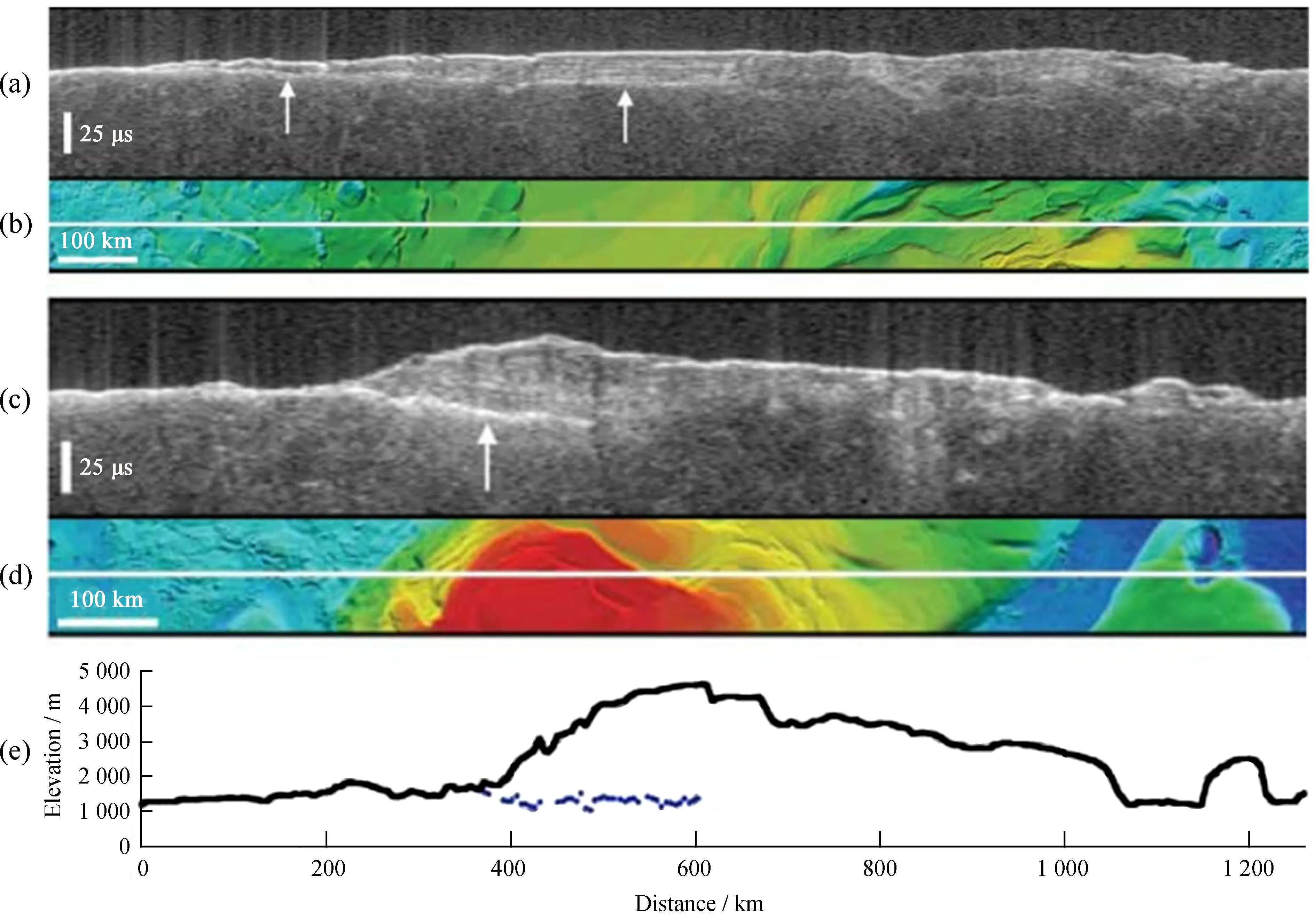
图6(a)火星次表层和电离层先进探测雷达第2 753轨探测数据;(b)第2 753轨星下点轨迹周围火星轨道激光高度计数据地形图;(c)火星次表层和电离层先进探测雷达第2 682轨探测数据;(d)第2 682轨星下点轨迹周围火星轨道激光高度计数据地形图;(e)第2 682轨探测数据,火星轨道激光高度计测得表面轮廓(黑色实线)与火星次表层和电离层先进探测雷达测得的基底形状(蓝色)[27]Fig.6(a) MARSIS data from orbit 2 753; (b) MOLA topography along the ground track of orbit 2 753; (c) MARSIS data from orbit 2 682; (d) MOLA topography along the ground track of orbit 2 682; (e) MARSIS data from orbit 2 682. MOLA surface elevations (black line) and MARSIS measured basal elevations (blue symbols) [27]
经过火星次表层和电离层先进探测雷达对南极层状沉积探测的数据积累,文[27]还运用覆盖整个南极层状沉积的火星轨道激光高度计表面高程数据减去经过插值的火星次表层和电离层先进探测雷达测得的基底高程数据,得到对应位置的南极层状沉积的厚度,并绘制成厚度分布图(见图7)。
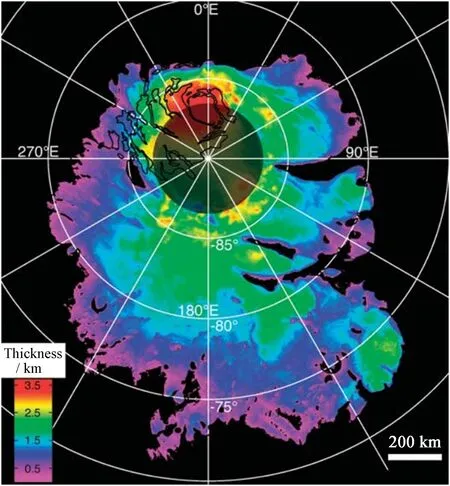
图7 基于火星次表层和电离层先进探测雷达测得的数据与火星轨道激光高度计表面高程数据绘制的火星南极层状沉积厚度分布图[27]Fig.7 Map of the SPLD thickness, based on MARSIS mea-surements and MOLA surface topography [27]
火星次表层和电离层先进探测雷达近年来最重大的发现也来自南极层状沉积,文[28]研究了火星次表层和电离层先进探测雷达在南极高原地区进行探测获得的数据,探测区域以193°E,81°S为中心,宽度为200 km,大部分地区的基底反射回波较弱,但在某些区域,基底反射回波十分强烈,甚至强于表面回波(图8)。将次表层回波的强度归一化到表面回波的强度,并绘制归一化后的基底回波强度区域分布图,分布图显示,在193°E,81°S附近存在一个20 km宽的次表层回波异常区域。对异常区域的地质结构进行仿真,得到一组归一化后基底回波能量与基底介电常数关系曲线的包络(图9),并以此为依据计算基底介电常数取值对应的可能性,分析仿真结果得到异常区域基底最可能的介电常数取值大于15,这一结论推出了一个合理解释:该异常区域的层状沉积下可能存在液态水,而水中含有镁、钙、钠等的高氯酸盐是其在低温环境下仍能保持液态的原因。

图8 火星次表层和电离层先进探测雷达第10 737轨在南极高原获得的探测数据,可见部分地区基岩回波极为强烈,形成高亮区域[28]Fig.8 MARSIS data from orbit 10 737 on the Planum Australe. Strong basal reflections can be seen at some locations, where show as highlight area [28]
文[29]使用火星次表层和电离层先进探测雷达对火星经度130°~240°E赤道地区的探测数据,对梅杜莎槽沟构造进行了研究,梅杜莎槽沟构造可能是火星上最年轻的地表沉积区域之一,面积约为2.1×106km2。火星次表层和电离层先进探测雷达探测到了梅杜莎槽沟沉积物与下方地形构造的次表层界面(图10),探测数据揭示了梅杜莎槽沟构造沉积物的厚度与介电特性,该结果支持之前对梅杜莎槽沟沉积物体积的估计范围(1.4×106~1.9×106km3)。由探测数据中测得的时延给出梅杜莎槽沟沉积物的介电常数实部为2.9 ± 0.4,由次表层回波的损耗计算出衰减系数为~0.004 8 ± 0.002 4 dB/m。上述结果暗示梅杜莎槽沟沉积物可能为干燥的疏松物质或水冰与高介电常数的其他物质的混合物,如果沉积物为后者,则其中的含尘量将高于南极层状沉积的10%。
浅表层雷达由于其较高的频率和较宽的带宽,穿透深度较浅,但深度分辨率较高,对南极高原、北极高原以及其他地区可以进行更为精细的探测,获取了一些火星次表层和电离层先进探测雷达无法探测到的信息。
文[30]利用浅表层雷达在火星北半球中纬度的德特罗尼鲁斯·门萨地区的叶状山麓冲积平原的超过100轨探测数据发现,星下点在穿过河谷平原经过舌状岩屑坡时出现表面回波分裂为两个时延不同的回波(图11),利用火星轨道激光高度计数据建模仿真结果确定较低的回波不是由表面杂波导致,该回波为次表层界面反射回波。通过时延估计舌状岩屑坡材料的介电常数实部约为3,推测得到衰减率约为2 dB/μs,与较纯净的水冰或水冰和少量其他物质的混合物相符。
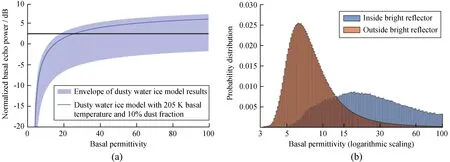
图9(a)火星次表层和电离层先进探测雷达中心频率4 MHz时对异常区域地质分层模型进行仿真的结果,蓝色阴影区域为归一化后基底回波能量与基底介电常数关系的曲线包络,黑色直线为实际探测数据中基底回波能量中值;(b)异常区域内外基底介电常数取值分布[28]Fig.9(a) Results of the electromagnetic simulation of layers model of the bright reflection area computed at 4 MHz, the blue shaded area is the envelope of all curves between normalized basal echo power and basal permittivity, and the black horizontal line is the median normalized basal echo power at 4 MHz from the observations; (b) Basal permittivity distributions inside (blue) and outside (brown) the bright reflection area [28]
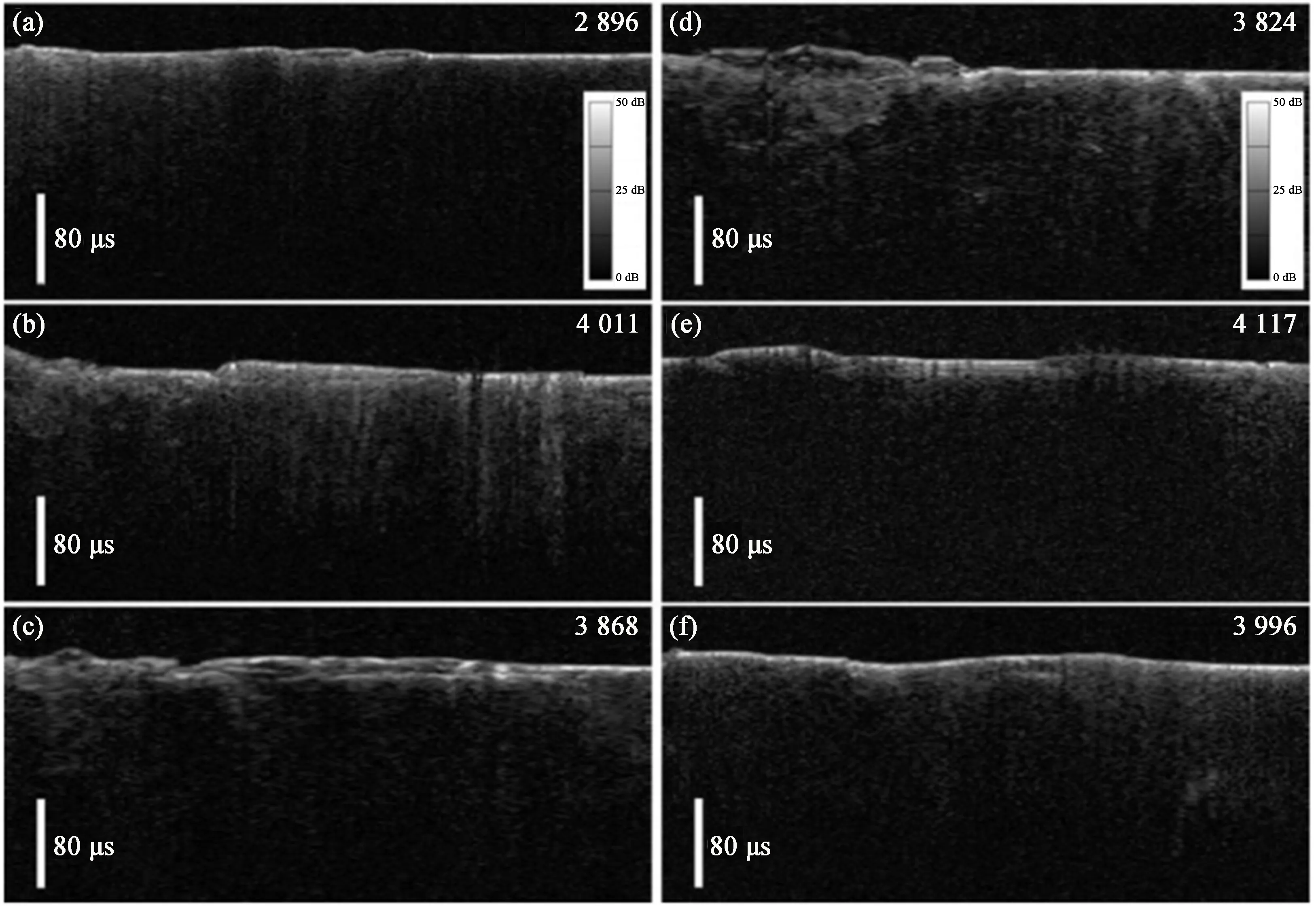
图10(a)火星次表层和电离层先进探测雷达第2 896轨探测数据;(b)火星次表层和电离层先进探测雷达第4 011轨探测数据;(c)火星次表层和电离层先进探测雷达第3 868轨探测数据;(d)火星次表层和电离层先进探测雷达第3 824轨探测数据;(e)火星次表层和电离层先进探测雷达第4 117轨探测数据;(f)火星次表层和电离层先进探测雷达第3 996轨探测数据。以上探测数据均在梅杜莎槽沟构造区域采集[29]Fig.10(a) MARSIS data from orbit 2 896; (b) MARSIS data from orbit 4 011; (c) MARSIS data from orbit 3 868; (d) MARSIS data from orbit 3 824; (e) MARSIS data from orbit 4 117; (f) MARSIS data from orbit 3 996; these MARSIS orbit tracks were measured in the Medusae Fossae Formation[29]
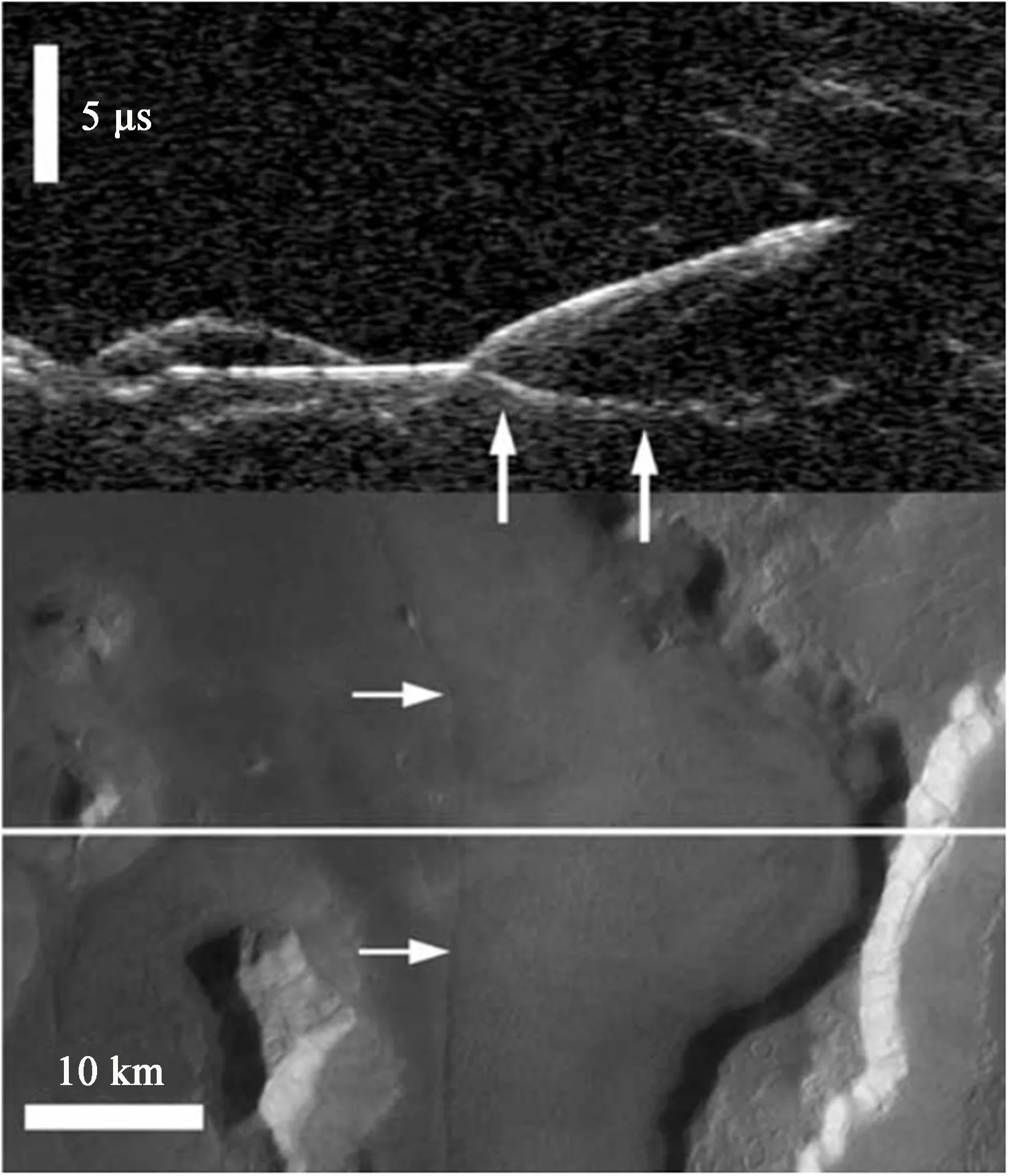
图11 浅表层雷达在星下点穿过舌状岩屑坡时获得的探测数据[30]Fig.11 SHARAD radargram along the ground track of lobate debris aprons [30]
这种舌状岩屑坡不仅出现在北半球中纬度地区,在火星南北半球30°~60°都有分布。文[31]使用浅表层雷达在火星南半球中纬度的海勒斯撞击坑东部边缘附近的多组探测数据,绘制了多幅舌状岩屑坡的次表层雷达图像(图12),经过与火星轨道激光高度计模拟仿真数据的对比以及多轨探测数据间的对比,确定了表面以下的反射回波为次表层界面回波,分析图像表明次表层介质十分均一,且大型岩石碎片不是其中的主要组分。测量探测数据中雷达波穿越介质造成的衰减,以及表面回波与次表层回波的关联,测得衰减系数最大为10 dB/km,与纯水冰相符,且证明舌状岩屑坡下掩埋的冰川含尘量不可能高于10%。较弱的衰减率以及与水冰中情况接近的雷达波速,与火星次表层和电离层先进探测雷达在极地层状沉积的观测结果相符,这一结果指出舌状岩屑坡内部的主要成分为水冰,印证了舌状岩屑坡下掩埋着冰川这一假设。
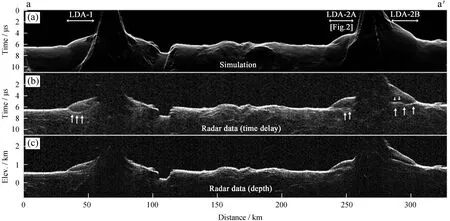
图12(a)火星轨道激光高度计数据仿真得到的表面杂波;(b)浅表层雷达第6 830轨探测数据,白色竖直箭头指出了与表面杂波仿真数据不相符,且在相邻轨道的探测中也证实存在的回波;(c)将原始探测数据进行时延-深度变换后的图像,假设舌状岩屑坡表面下的成分为水冰[31]Fig.12(a) Simulated surface clutters with MOLA data; (b) SHARAD data from orbit 6 830, vertical arrows identify echoes not consistent with surface clutter simulation and also confirmed in adjacent tracks; (c) Radar data converted into depth assuming a water-ice composition [31]
位于火星北半球中纬度的乌托邦低原直径约为3 300 km,多为多边形与扇形洼地地貌,研究人员根据对乌托邦低原进行的形貌分析猜测,该区域近地表含有大量水冰。文[32]运用浅表层雷达探测数据,结合火星轨道激光高度计测得的火星表面数字高程模型,利用陡坡估计次表层反射体的深度,拟合后估计近次表层物质的介电常数为2.8 ± 0.8,符合水冰、石质物质以及空气混合物的介电特性,估计其中水冰含量为50%~85%,石质材料低于30%,孔隙空洞占体积的15%~50%,水冰体积达到8 400~14 300 km3,乌托邦低原存在水冰的说法得到了雷达探测数据、火星气候模型以及表面形貌分析的支持。
浅表层雷达在南极高原、北极高原的探测揭示了层状沉积中精细的分层结构,为火星气候变化、水文变化等研究提供了更多线索。文[33]利用浅表层雷达在南极普罗米修斯舌状高原(Promethei Lingula)获取的探测数据,分辨出南极层状沉积厚度可能为米级的几个次表层分层界面(图13),回波时延范围为1.7~5.3 μs、4.3~5.6 μs、5.6~7.1 μs、11.0~12.9 μs,用水冰的介电常数实部3.5将时延转换为深度后,各分层界面深度为130~420 m、340~450 m、450~570 m、890~1 030 m。文[34]使用浅表层雷达第5 192轨探测数据绘制北极高原的次表层地层图,雷达图像中能分辨出不同成分的冰、尘埃、沙占比导致的次表层介质分层界面(图14),且能探测到层状沉积下方的基底层,此外,还探测到一些深达数百米的螺旋槽,这些螺旋槽将浅层的反射回波分为数段。同时,对北极高原边缘基底层露头的探测证实了格明娜舌状高原(Gemina Lingula)下不存在基底层,此处的北极层状沉积直接坐落在瓦斯蒂塔斯·伯勒里斯平原构造(Vastitas Borealis Formation)上,探测到的基底较为平坦,说明层状沉积的质量负担并没有造成基底的严重挠曲,与火星次表层和电离层先进探测雷达的探测结果相符,支持北极高原存在极厚的弹性岩石圈这一假设。
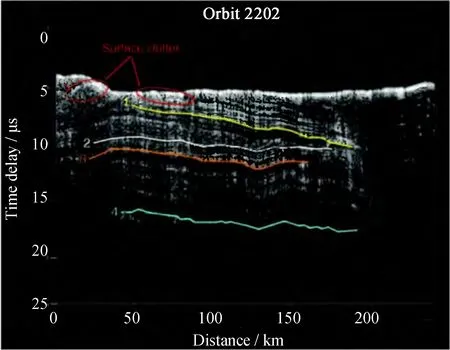
图13 浅表层雷达第2 202轨探测数据局部放大图。图中显示了4个次表层反射体,这4个反射体将不同介质分隔开[33]Fig.13 Enlarged view of SHARAD data from orbit 2 202. 4 subsurface reflectors separate different dielectric sequences [33]
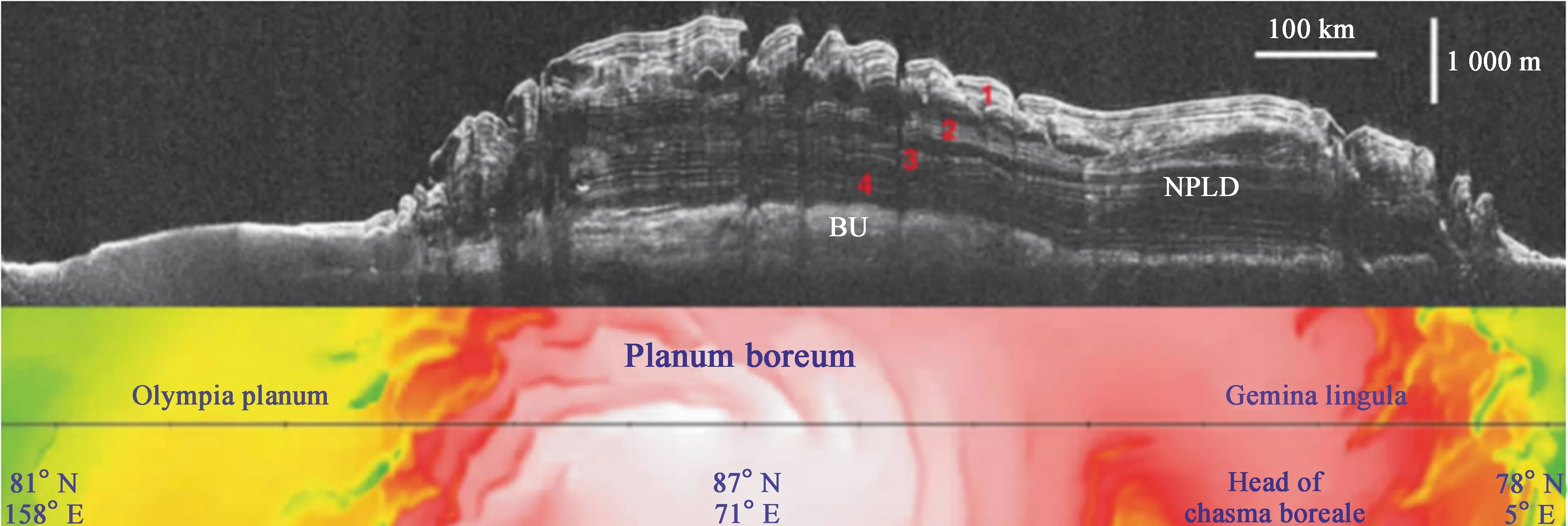
图14 浅表层雷达第5 192轨探测数据,已经过时延-深度转换,使用的次表层介质介电常数为3[34]Fig.14 SHARAD data from orbit 5 192. Range time delay has been converted into depth by assigning real permittivity of 3 below the detected ground surface [34]
2 国内外未来火星探测雷达载荷
2020年,中国、美国、阿联酋等已发射探测器开始火星探测,而欧洲原定于2020年发射的火星探测器由于疫情等原因推迟到2022年。我国、美国的探测器都携带了由巡视器搭载的次表层探测雷达,此外我国的轨道器上也搭载了次表层探测雷达。美国航空航天局的MARS 2020任务巡视器毅力号搭载的雷达为火星次表层实验雷达成像仪(The Radar Imager for Mars subsurface eXperiment, RIMFAX),欧洲航天局ExoMars 2022计划的罗莎琳德·富兰克林号火星车将搭载火星水冰及次表层沉积物探测仪(Water Ice and Subsurface Deposit Observations on Mars, WISDOM)。
2.1 国外雷达载荷
火星次表层实验雷达成像仪主要目标为对火星次表层进行成像,获取火星地表下的地质特征,并提供次表层成分的信息,探地雷达获取的剖面图像能够揭示层积岩暴露在火星表面上的历史,比如撞击、风蚀、河流冲积痕迹等[35]。
火星次表层实验雷达成像仪的天线安装在巡视器的尾部偏下的地方,为超宽带蝴蝶结形缝隙天线,使用时在接收模式与发射模式间切换,工作频段介于浅表层雷达、火星次表层和电离层先进探测雷达与火星水冰及次表层沉积物探测仪之间(150~1 200 MHz),采用门限调频连续波(Gated-FMCW),一次全频段扫描1~20 ms,具体由工作模式决定,且工作频段分为3个单独的扫描频段:150~300 MHz,300~600 MHz和600~1 200 MHz。火星次表层实验雷达成像仪对次表层地貌进行成像的深度超过10 m,垂直空间分辨率(距离向分辨率)优于30 cm,沿火星车行进路线每10 cm进行一次水平采样(方位向分辨率)[35]。
由于同时接收来自地表与更深的次表层回波是不可能的,火星次表层实验雷达成像仪划分了3种工作模式:表面模式、浅层模式和深层模式。3种工作模式的主要区别在于接收机的动态范围窗,表面模式下天线自身反射以及火星表面反射回波在窗内;浅层模式去除了天线自身反射,动态范围窗将表面反射以及浅层反射包括在内;深层模式将天线自身反射、表面反射和浅层反射的回波都置于动态范围窗之外[36]。
火星次表层实验雷达成像仪在2015年4月、2016年4月分别进行了两次地面验证实验,地点在挪威斯瓦尔巴特群岛,该区域为冷温复合冰川,表面温度低,部分冰川底部存在较为温暖的分层。数据应用布莱克曼-哈里斯窗函数进行补零处理,经傅里叶逆变换后成像(图15),而2016年在此基础上还进行了去背景处理(图16)。
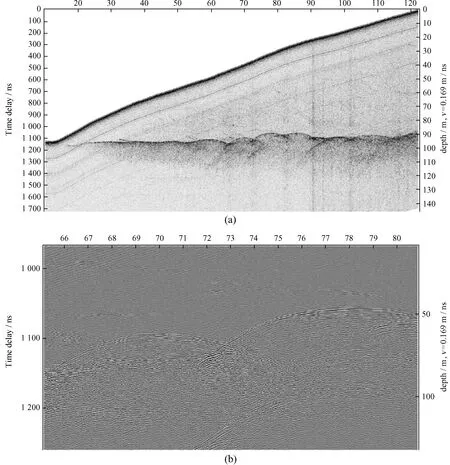
图15(a)2015年火星次表层实验雷达成像仪外场实验所得120 m剖面图;(b) (a)图中双曲线结构放大后[35]Fig.15(a) The figure shows a 120 m long radar profile from 2015 RIMFAX field test;(b) The figure gives a zoomed in version of (a) [35]
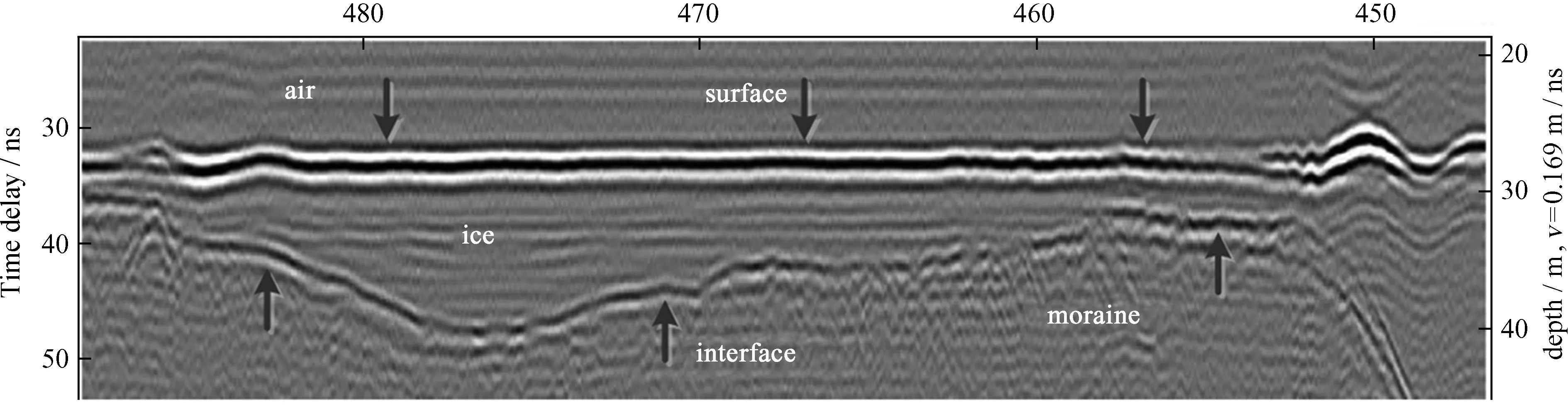
图16 2016年火星次表层实验雷达成像仪外场实验所得剖面图(表面模式);长度约为40 m,表面以下深度约为1.5 m[36]Fig.16 Radar profile using the Surface Model from 2016 RIMFAX field test. The length of the profile is around 40 meters and the depth scale is about 1.5 meters below the surface reflection [36]
欧洲航天局ExoMars 2022计划 “罗莎琳德·富兰克林” 号火星车搭载的火星水冰及次表层沉积物探测仪的科学目标为三维地质结构以及演化历史,探测水在次表层的分布以及存在状态[37]。雷达将与火星车上装载的钻头配合,雷达可以沿火星车行驶轨迹在钻探前获取次表层信息,探测深度约3 m,垂直向的空间分辨率可达厘米级。火星水冰及次表层沉积物探测仪可以进行全极化测量,提供关于三维地质结构、地层学以及近地表的次表层演化历史的关键信息,还能为钻头钻探提供位置信息,避免钻头损坏。
火星水冰及次表层沉积物探测仪是一种特高频步进频率雷达,频段500 MHz~3 GHz,带宽2.5 GHz,通过天线发射大量连续波信号,每个连续波对应一个频率,持续时间为一个步长Δt,取值200 μs[37]。系统的带宽由发射频率的数量Nfreq以及发射频率的间隔决定,火星水冰及次表层沉积物探测仪的Nfreq标称值为1 001,Nfreq决定了探测仪的距离分辨率,而频率间隔决定了雷达的最大模糊距离[38]。接收数据后,对数据进行希尔伯特变换(使信号出现90°相移,由于希尔伯特变换只适用于单频率信号,而步进频率信号每个时刻只发射一种频率的脉冲,因此适用希尔伯特变换),反演出雷达覆盖环境的复传递函数,再进行逆傅里叶变换将信号转变回时间域。此外,对回波信号施加不同的频域窗函数以减小距离向的旁瓣,进行滤波以提高信号的信噪比(图17)。
随着巡视器行进,雷达接收的数据经过处理后可以得到次表层地质结构的二维剖面图,此时的数据产品只提供来自各反射体回波的时延。经过对巡视器行进路线的进一步探测,并使用一个金属盘(完全导电已知目标)进行定标,火星水冰及次表层沉积物探测仪可以获得理想情况下的表面回波幅度,并估计表层的介电常数,确定表层的厚度。
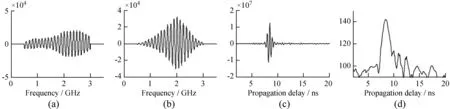
图17(a)频率域测得信号;(b)加窗、滤波减小旁瓣、提高信噪比后的信号;(c) (逆傅里叶变换后)时间域合成响应;(d)时间域合成响应(分贝表示)[38]Fig.17 From left to right: (a) Measured signal in the frequency domain; (b) Signal in the frequency domain after windowing and filtering to reduce side lobes and enhance the SNR; (c) Synthetic response in the time domain (after FFT) linear scale; (d) Synthetic response in the time domain in decibels [38]
火星水冰及次表层沉积物探测仪进行了大量的外场地面验证实验,选择地区以干燥或寒冷环境为主,包括智利阿塔卡马沙漠、意大利埃特纳火山、阿尔卑斯山脉冰川以及澳大利亚达赫施泰因冰穴。在多种环境下进行实验采集的数据证明,火星水冰及次表层沉积物探测仪有能力分辨浅层精细地质结构,为研究地理、地质演化历史提供线索。以在阿塔卡马沙漠某处被掩埋的河床进行的实验数据为例,火星水冰及次表层沉积物探测仪成功探测到河床底部以下约50 cm处的沉积物分层(图18)[37]。
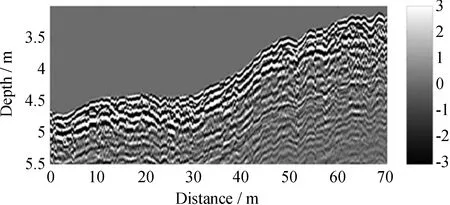
图18 阿塔卡马沙漠外场实验火星水冰及次表层沉积物探测仪雷达图像,其揭示了一处沉积物掩埋下的干涸河床,被掩盖的河床深约50 cm,宽约7 m(图中从左到右约30 m位置) [37]Fig.18 WISDOM field test radargrams that reveal a small 50-cm-deep and 7-m-wide dried channel bed in the Atacama Desert (Chile) at about 30 m from the left [37]
2010年10月,在意大利埃特纳火山进行的外场验证实验开始前实验场地出现降水,造成实验场中火成碎屑沉积物含水量较高,但这并没有严重影响到火星水冰及次表层沉积物探测仪发挥探测能力,由回波数据绘制的剖面图清晰地显示次表层界面的形状,最大深度为3 m,探测间隔为10 cm[39]。由于火星水冰及次表层沉积物探测仪天线的方向图具有方向性,可进行两种同极化探测的配置,有助于火星水冰及次表层沉积物探测仪绘制地表下界面的三维形状,确定其所在位置范围,埃特纳火山以及达赫施泰因冰穴等地的实验数据处理后的产品都证明了这一点(图19)[37]。
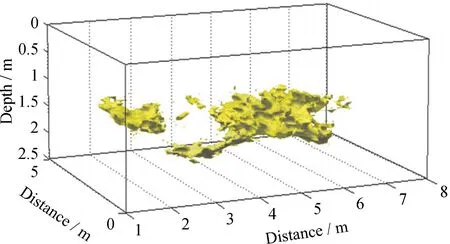
图19 达赫施泰因冰穴实验数据进行三维重建得到的基岩三维形状,基岩覆盖在约1.5 m厚的冰层下[37]Fig.19 3D reconstruction of bedrock beneath a 1.5-m-thick ice layer (ice caves in Dachstein) [37]
2.2 国内雷达载荷
我国2020年7月23日发射的火星探测计划天问一号极具挑战性地将巡视器与环绕器一起送往火星,巡视器上搭载了中国科学院电子所研制的火星车次表层探测雷达,环绕器上搭载了中国电子科技集团第三十八研究所研制的环绕器次表层探测雷达。两部雷达都采用双频双极化配置,同时拥有较深的探测深度与较高的精度,双极化探测能力可能在火星次表层水冰探测方面开拓一条新的道路。
2.2.1 火星车次表层探测雷达(Rover Subsurface Penetrating Radar, RoSPR)
火星车次表层探测雷达进行火星巡视区地表、次表层的超宽带全极化探测,发射线性调频信号[40],在高频模式下进行全极化探测。低频通道中心频率55 MHz,带宽80 MHz,脉宽145 μs,脉冲重复周期5 ms;高频通道中心频率1 300 MHz,带宽1 700 MHz,脉宽4 ms,脉冲重复周期5 ms。以雷达工作参数推算,在低频模式下,最大探测深度为1 125 m(介电常数ε=4),厚度分辨率为0.94 m(介电常数ε=4);在高频模式下,最大探测深度为30 m(介电常数ε=4),厚度分辨率为4.4 cm。
低频模式使用的天线为两组单极子天线,安装在火星车顶板下方,高频模式使用的天线为Vivaldi天线,安装在火星车前侧板上,两组天线的极化方式为相互正交[40]。高频、低频天线都是接收天线和发射天线分开,且高频天线每组天线由两个单元组成,两个发射天线单元互相正交,分别定义为H极化发射天线和V极化发射天线;接收天线同样两个单元互相正交安装,定义为H极化接收天线和V极化接收天线。因此,火星车雷达在高频次表层探测过程中将以如下方式进行全极化探测,两个发射天线依次交替发射正交极化的电磁波,两个接收天线也分别接收相应极化方式的回波,可构成HH, HV, VH, VV的全极化探测(图20)。低频通道的天线极化方式为HH,无法进行极化探测。
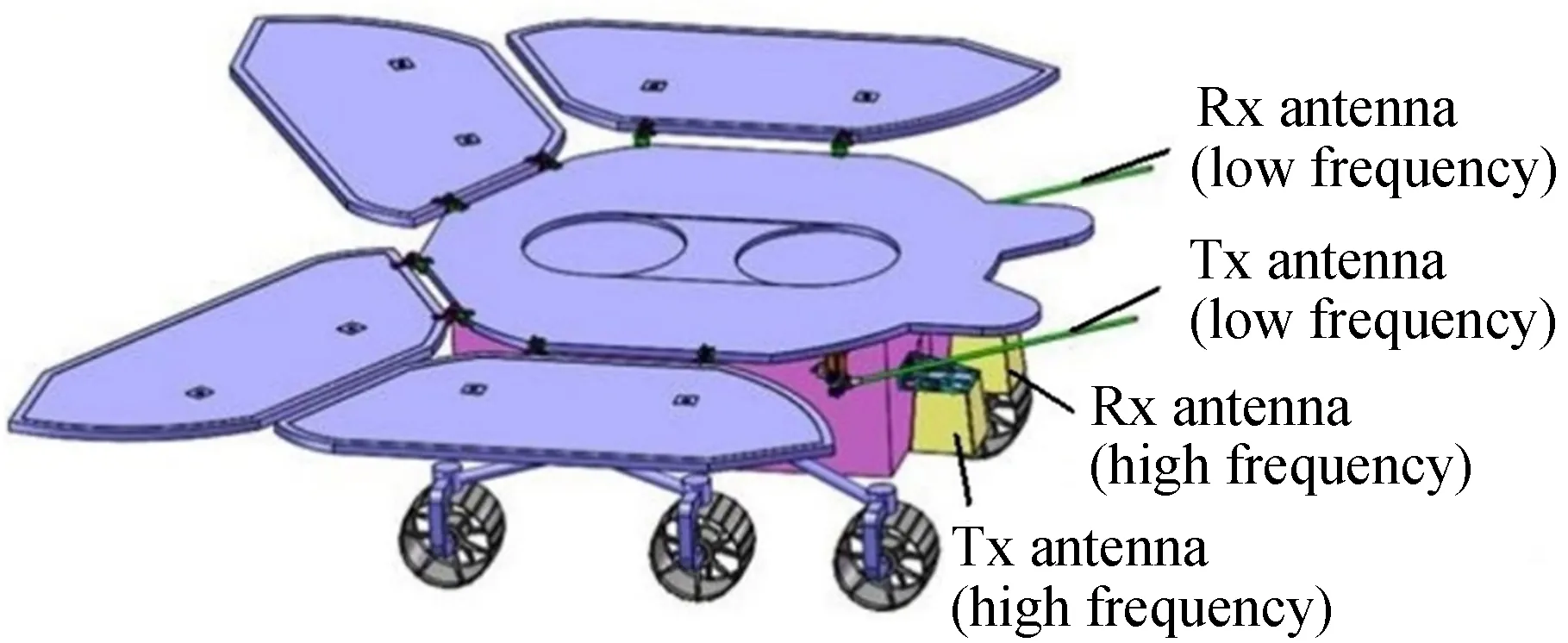
图20 高频、低频天线安装示意图Fig.20 The location of high frequency and low frequency antenna installation of RBMSPR
火星车次表层探测雷达进行了多项验证实验以验证其工作性能,并研究数据处理方法。实验室内场实验设置了一个长7 m、宽3 m、深2.5 m的实验池,其中装满了人造火山灰(介电常数ε=2.94 ± 0.56),并在深度不足0.5 m处埋设了金属管、塑料管、石块等物体(图21)。由于场地限制,该实验只使用高频探测模式,实验数据去除了车身造成的多次反射,并进行了去背景处理,数据处理结果中可识别金属管、塑料管与池底的回波(图22)[41]。火星车次表层探测雷达在2018年、2019年前往陕北榆林黄土、祁连山老虎沟冰川、内蒙古乌兰哈达火山地质公园等地进行外场验证实验,测试高频、低频模式对多种分层结构的探测性能。与安装在玉兔系列月球车上的探月雷达相比,火星车次表层探测雷达不再使用脉冲信号,而改为线性调频信号,这使得火星车次表层探测雷达的数据处理流程与探月雷达有所不同。
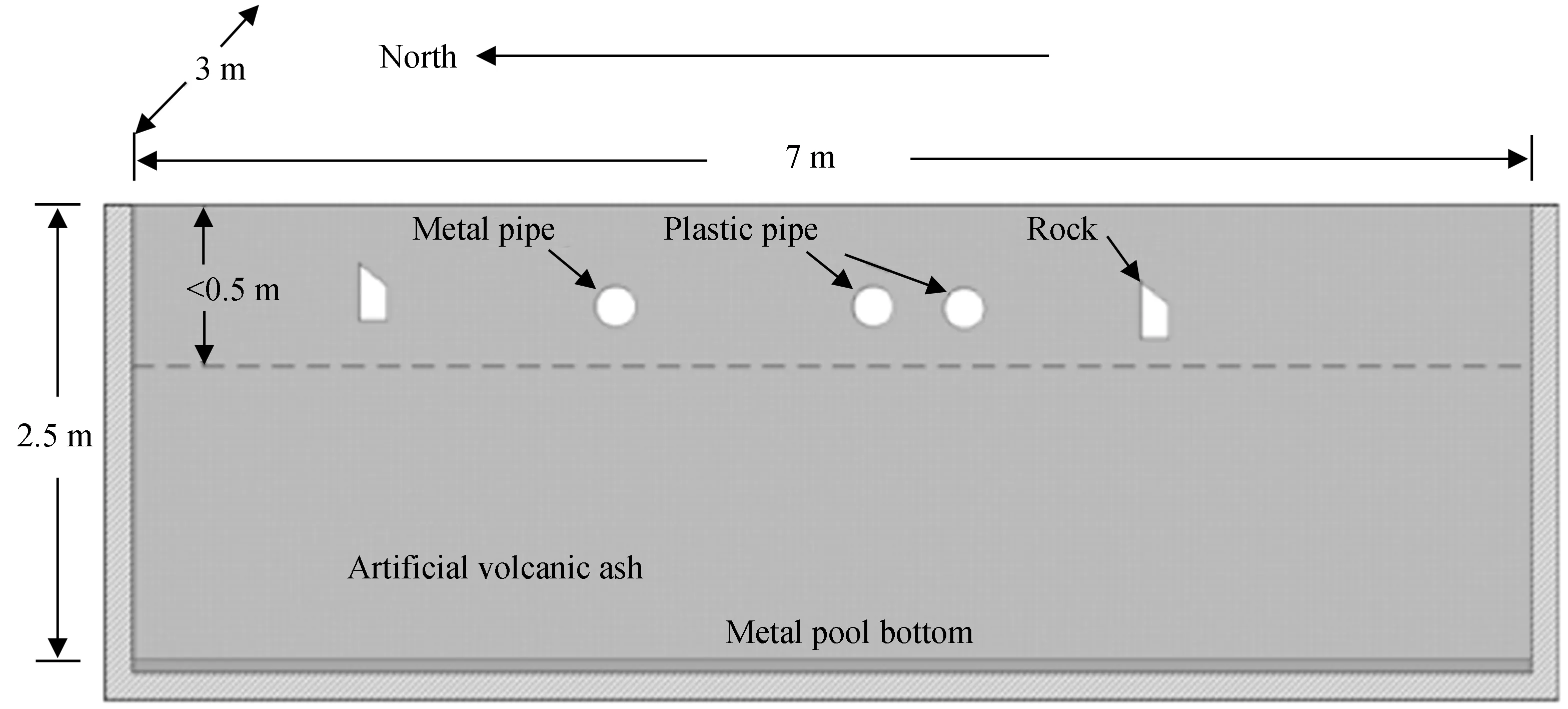
图21 填满人造火山灰的实验池[41]Fig.21 The test pool filled with artificial volcanic ash[41]
2.2.2 环绕器次表层探测雷达
我国搭载在天问1号环绕器上的轨道器次表层探测雷达全称为火星环绕器次表层探测雷达。环绕器次表层探测雷达与火星次表层和电离层先进探测雷达、浅表层雷达有很多相似的地方,也存在很大差异。环绕器次表层探测雷达采用双极化探测,这种探测方式可以通过计算不同极化方式回波的斯托克斯参量,探测水冰的存在,还可能提供关于火星冰盖内部性质等的线索,这是单极化雷达无法做到的。工作模式有甚低频探测模式、低频探测模式、高频探测模式以及测高模式,发射信号都为线性调频信号,各工作模式中心频率、带宽、脉宽、接收时窗、脉冲重复频率、回波叠加数以及采样率等参数不同,见表2。与火星次表层和电离层先进探测雷达、浅表层雷达相似,该雷达也使用了合成孔径技术以提高方位向分辨率。
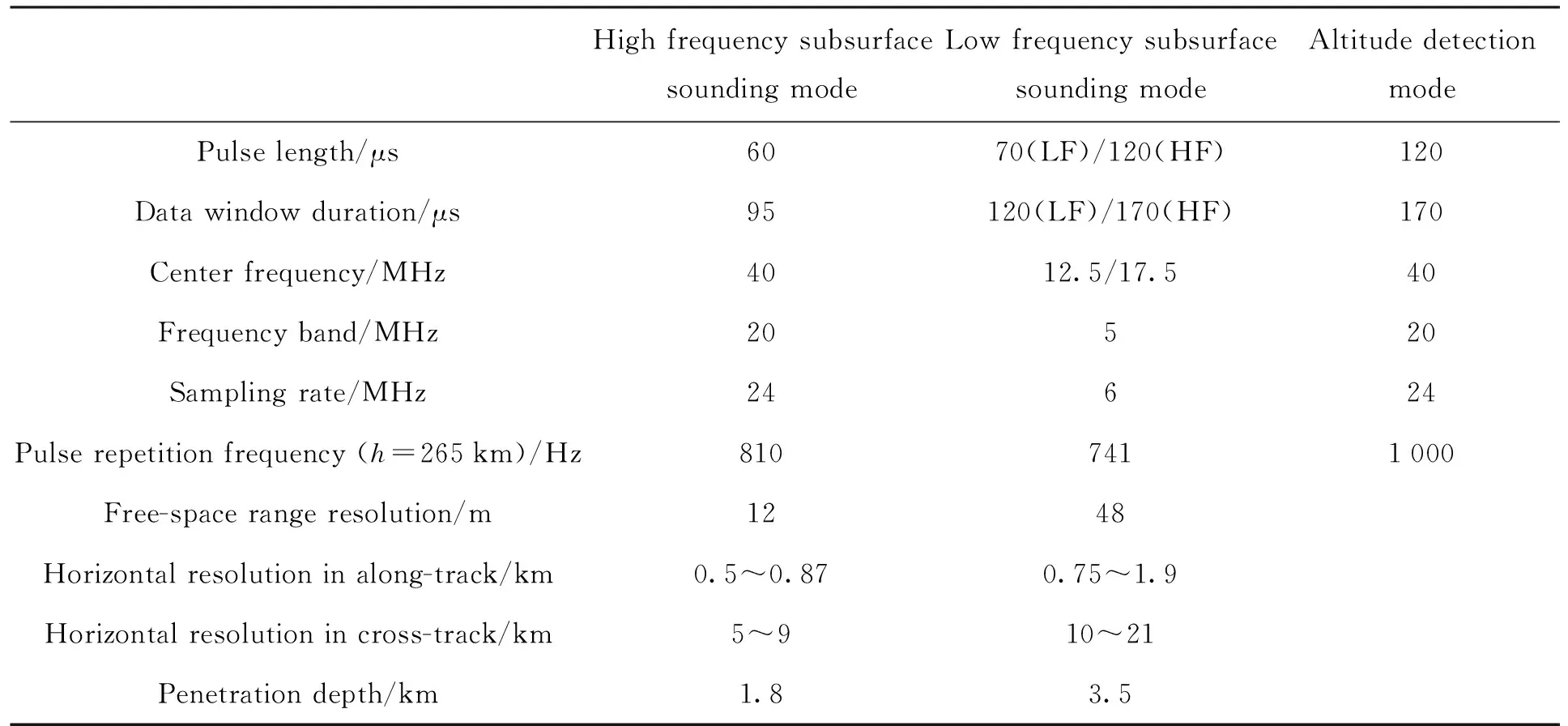
表2 3种模式对应工作参数以及性能参数Table 2 Performance parameters and operating parameters of 3 modes of MOSIR
环绕器次表层探测雷达的下传数据给数据处理提供了很大空间,既可以将原始数据下传在地面完成脉冲压缩、聚焦等处理,也可以在星上完成成像后下传。以原始下传数据为例,原始数据下传且完成解包、解压缩、分类后,根据雷达地面大回路数据以及地面定标数据确定收发通道、天线匹配滤波系数,根据高频与低频模式,原始回波数据按照文[20]的方法计算低频、高频相应的电离层补偿系数,点乘加窗后的标准脉冲压缩系数,获得用于脉冲压缩的参考函数,一次性完成脉冲压缩、收发通道补偿、天线响应补偿、电离层补偿。完成脉冲压缩后,按照目前设计的数据处理方法,初步选择使用后向投影算法完成聚焦成像处理。后向投影算法实现难度较低,但运算量较其他合成孔径处理算法大,原理是将雷达回波数据投影到成像区域的每个像素点,每个像素值通过计算相应的时延成像,具体实现方法为在每个帧(Frame)处计算环绕器的位置坐标,并计算21×300个聚焦点与天线的距离,以距离单元(高频模式下为6.25 m)为单位划分每个聚焦点对应的脉冲压缩后数据,以波长(高频为7.5 m,即光速/中心频率)为单位划分每个聚焦点对应的相位信息,复乘、多普勒窗函数处理后进行累加处理,完成成像。
环绕器次表层探测雷达除了利用高频、低频原始数据获得对应的电离层校正系数,还可以利用两种数据星下点回波的时间差计算对应的电子浓度总含量,这也是环绕器次表层探测雷达的重要数据产品之一。
2019年,环绕器次表层探测雷达在内蒙古磴口县进行了地面实验,实验使用热气球悬挂环绕器模型以及安装在模型上的次表层探测雷达进行自由飘飞实验以及系留飞行实验,系留飞行实验主要进行天线隔离度以及天线增益定标,自由飘飞实验使用测高模式、高频模式、低频模式进行测量,验证测高模式的测高精度,经地形矫正、时间校正后测高精度满足10 m的设计指标要求。高频模式与低频模式数据用于数据压缩质量验证以及数据处理流程验证,结果满足压缩质量要求,数据处理方法与流程有效。
3 总结与展望
由于雷达在较低的频段具有较强的穿透能力,且不受光照限制,可以对天体不受光照的一面或永久阴影区进行探测,在对月球、行星以及小行星的探测上有较大的应用价值,穿透能力用于探测星球的次表层结构、地表以下水冰以及小行星的内部结构等,对研究目标天体的地质、气候、水文演化变迁历史具有重大意义,且雷达具备的多极化探测能力使其在水冰以及干冰探测上具有独特的优势。但由于雷达通过发射电磁波并接收物体反射的回波进行探测,本身的性质决定其需要通过一系列的数据处理才能反映实际探测的物理量,进行轨道次表层雷达探测的电磁波还受到行星电离层的影响,降低雷达的探测精度。搭载在轨道器上进行次表层探测的雷达一般采用合成孔径技术,需要经过距离向和方位向处理才能将回波转化为可读的图像,而方位向处理方法众多,从合成孔径技术起步至今,已出现线性调频变标算法、波束锐化算法、波数域算法、距离-多普勒算法等方法,目前,线性调频变标算法与波束锐化算法应用于浅表层雷达与火星次表层和电离层先进探测雷达的数据处理,而相位梯度自聚焦算法以及对比法用于电离层校正。
火星次表层和电离层先进探测雷达与浅表层雷达是目前已在火星轨道上工作的两部次表层探测雷达,除了通过数据处理对回波进行成像,在后期的研究中,需要使用火星轨道激光高度计探测获得的火星表面数字高程模型对火星表面进行建模,用于火星表面杂波的仿真;使用多种方法估计火星表面以及次表层物质的介电常数、损耗角正切等数据,以此为依据推测地表下的物质成分、水冰的含尘量等科学信息。
美国于2020年7月30日开始火星探测任务,其巡视器携带一台雷达。我国首次火星探测任务天问一号探测器于2020年7月23日发射成功,包括环绕器与巡视器,各搭载一部雷达。我国的环绕器次表层探测雷达拥有双频、双极化探测能力,虽然首次将此类雷达应用于行星探测,但有火星次表层和电离层先进探测雷达与浅表层雷达多年数据处理的技术沉淀以及对火星大部分地区的高质量探测,我国轨道器次表层探测雷达具有在火星次表层和电离层先进探测雷达与浅表层雷达的基础上取得更多成就的潜力。火星次表层和电离层先进探测雷达与浅表层雷达对火星的探测覆盖广,成果多,如何在前人已取得成就的基础上更进一步是我国雷达研究值得思考的一点。巡视器雷达虽然更改了体制,但拥有玉兔一号、二号的技术经验,以及月球车雷达的优秀表现,我们应该对火星巡视器雷达抱有信心。我们相信,我国首次火星探测任务搭载的两部雷达将带回更多关于火星次表层结构、水冰等的科学信息,在行星科学的研究上发挥至关重要的作用。
