基于3DS Max的土方机械照明灯虚拟仿真技术
2021-04-15彭广盼
彭广盼
(无锡职业技术学院机械技术学院,江苏 无锡 214122)
1 土方机械产品照明灯的设计要求
土方机械是我国基础设施建设中最重要的工程施工机械,其用途十分广泛,遍布国民经济的各个领域,其中主要包括交通运输、能源、原材料、农林水利、城乡发展以及国防现代化等领域[1]。土方机械包括挖掘机、装载机、平地机、推土机、铲运机、压路机、自卸车、吊管机以及挖沟机等产品,这类机械作业工况往往较为恶劣,土方机械面临一般机械产品所没有的安全风险;因此,国际上对土方机械安全功能的要求越来越高。欧盟早在20世纪90年代中后期就发布了EN474-1~11《土方机械安全》通则和推土机、装载机、挖掘装载机、液压挖掘机、自卸车、铲运机、平地机、吊管机和回填压实机特殊要求等11项标准,用于支撑 98/37/EC 机械指令等技术法规,设定了土方机械进入欧盟市场的准入门槛[2]。我国在2010年12月,由国家标准化管理委员发布了GB 25684.1—2010《土方机械 安全》标准,该标准适用于GB/T 8498—2008/ISO 6165:2006定义的所有土方机械、机器附属装置以及主要用途为使用工作装置进行挖掘、装载、运输以及对土壤和其他物料进行钻孔、摊铺、压实或挖沟等作业的派生机器。标准的第1部分(通用要求)主要涉及对与主机部分相关的转向、制动、通道装置、防护装置、操作手册、安全标志、照明和电子控制的要求,其中包括对照明的要求。
目前国际上对设计土方机械产品照明灯提出要求的标准有ISO12509,国内参照ISO12509制定的标准有GB20418—2011,该标准规定了对土方机械上使用的照明、信号、标志灯以及反射器的安装和性能的最低要求,适用于GB/T 8498定义的非公路和公路型自行轮胎式或自行驴打滚式土方机械,该标准是1个比较粗略的、要求比较低的标准。随着灯具行业的不断发展,所有灯具都能满足ISO12509标准的照明要求。因此,设计出经济、合理的照明灯具是设计阶段考虑的首要问题。相关的要求标准包括美国职业安全与健康管理局(OSHA)对土方机械在夜晚的照明要求,见表1;美国国家标准化协会(ANSI)对工业活动照明要求,见表2。因此,在土方机械照明灯的开发阶段,需要综合考虑各种要求和因素,而仅依赖于样机试验的方法,已经无法满足现代设计周期的要求。在工程机械行业里,越来越多的大公司在新产品开发阶段,采用虚拟验证的方法来判断新产品是否满足某个设计要求,常见的有对可制造性、可装配性、可维护性以及人机工程等方面的虚拟验证,但是用软件来模拟机器灯具在夜间的照明效果的方法还不太常见。
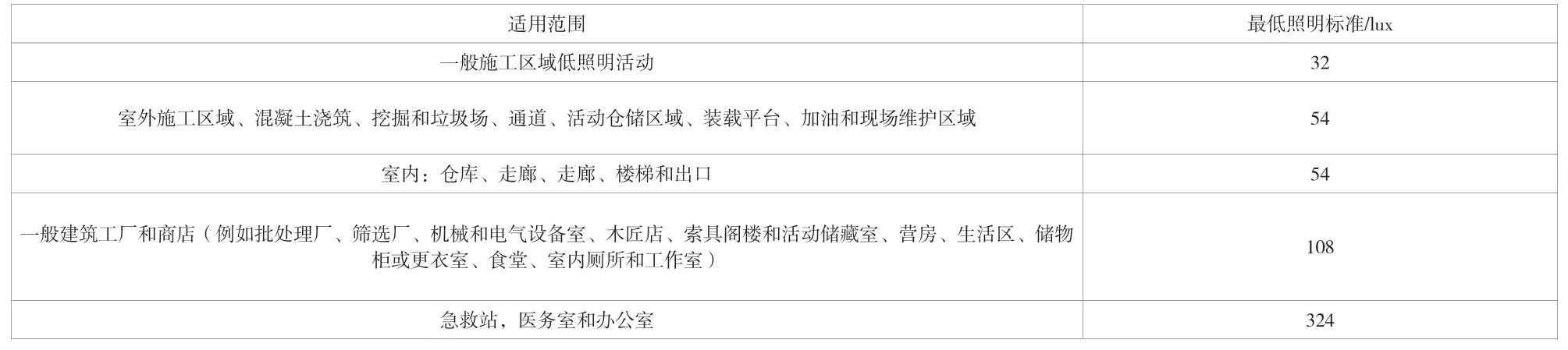
表1 OSHA相关的最低照明要求(Hutchings 1998)

表2 ANSI相关的最低照明要求(ANSI 1973)
2 基于3DS Max的虚拟仿真方法
2.1 仿真流程
3DS Max软件是Autodesk公司推出的基于PC系统的三维动画渲染和制作软件。它有强大的模拟现实环境的能力,可以渲染出逼真的图片[3]。利用其渲染功能,也可以对土方机械产品的照明灯效果进行渲染和分析。虽然传统的工程建模软件(例如UG、Solidworsk和ProE等)也可以进行简单的渲染,但是该类软件的场景灯光都不能自定义。另外3DS Max软件自带的测光仪能够测量各个测量点的照度流明值,该数据可以支撑试验人员对灯具进行评价。
仿真流程如下:首先,将设计好的产品三维模型转化为轻量化的模型,去除一些不必要的机器内部零部件,使模型尽量的轻量化,再将轻量化的机器模型和照明灯模型导入3DS Max软件。其次,在照明灯的模型表面创建光度学灯光(photometric lights),并加载IES文件(光源配光曲线文件的电子格式)定义光度学灯光;最后,对场景渲染输出进行设置,包括创建照相机、设置照相机的位置和角度、根据设计要求放置测光仪、选择机器的材质以及输出图片的清晰度等。全部设置好之后,打开灯光,计算测光仪测得的灯光数值,再渲染模型并输出效果图。具体的流程如图1所示。
2.2 推土机灯光仿真实列
推土机是1种能够完成挖掘、运输和填平等工作的土方机械,在采矿、采煤等大型工程中有广泛的用途。很多的大型工程都是充分利用机械进行24 h三班倒作业,晚上作业已经是常态,因此对推土机的照明效果有很高的要求。该小节列举了对某履带式推土机进行灯光仿真的实例。实验的目的是对LED灯和卤素灯的照明度、光线分布以及实际效果进行比较,为新产品开发工程师选择合适的灯具提供一些直观的数据。根据推土机机型的特点以及作业特征,在场景中的8个位置设置了测光仪,如图2所示。第1组测光仪的位置主要考虑机器近处灯光的照明情况,便于机器夜晚作业;确定方法如下:1) 在离机器履带前端5 m的地方放置1条竖直线,在履带外侧放置2条水平线。2) 在它们的2个焦点处分别引出2条夹角为45°和30°的交线。该线条的交点就是放置测光仪R5-1、R5-2、R5-3、R5-4、R5-5和R5-6的位置。第2组测光仪放置在离机器较远的地方,便于分析机器夜晚行驶时的照明情况;确定方法是在离机器履带前端20 m的地方放置1条竖直线,与之前2条水平线得到2个交点,交点就是放置测光仪R20-1和R20-2的位置。
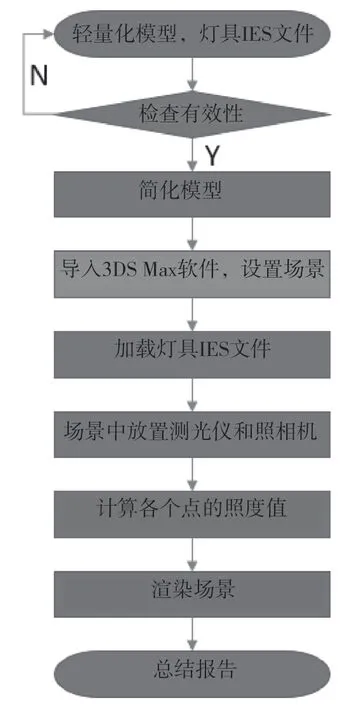
图1 仿真流程
放置好测光仪后,就可以进行测光计算了。推土机的灯具通常带有灯具支架,该支架可以让灯具旋转一定的角度。如果需要灯具照向前方更远的地方,通常将灯具调成默认的水平向前的状态;而如果需要灯具照向近处,则可以把灯具调整为水平向下15 °。为了便于比较LED灯和卤素灯优劣,该实验将测得2种灯具在2种状态下的灯光照度值(共4组数据)。首先,测第1组,使LED灯处于水平状态,打开LED灯,关闭卤素灯,通过软件中的计算分析模块,对各个位置测光仪的数值进行计算,得到第1组数值。其次,关闭LED灯,打开卤素灯,计算出第2组数值。再次,关闭卤素灯,打开LED灯,并将LED灯的朝向调整为水平向下15 ° ,计算出第3组数值。最后,关闭LED灯,打开卤素灯,并将卤素灯的朝向调整为水平向下15 °,计算出第4组数值。将4组数值汇总在1个表格中,见表3。从表3中可以看出,当灯具处于水平状态时,LED灯在近处中间位置和在远处的灯光照度值要比卤素灯高很多;而当灯具处于水平向下15°时,LED灯在测量点测得的灯光照度值反而比卤素灯的值要小,这可能是因为LED灯的集中照亮点正好错开了测光仪的放置点。因此,不仅要看数值,还要看灯光的具体分布情况,这就需要对灯光的照明效果进行渲染。
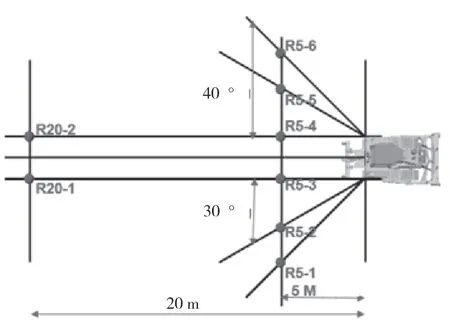
图2 测光仪分布
设置渲染输出的一些参数,对场景进行渲染,就可以得到实际灯光分布的渲染效果。2种灯具在水平状态下的灯光分布效果如图3所示;2种灯具在水平向下15 °状态下的灯光分布效果如图4所示。通过渲染效果图可以直观地看到,2种灯具的灯光分布以及照明强度是完全不同的。LED灯集中照亮的区域在前方10 m左右,且照明度比较高;卤素灯集中照亮的区域在推铲的正前方,总体照明强度不如LED灯。灯具选型工程师可以根据2种灯具渲染出来的灯光分布效果以及所得照明值的大小,合理地对灯具进行配置。
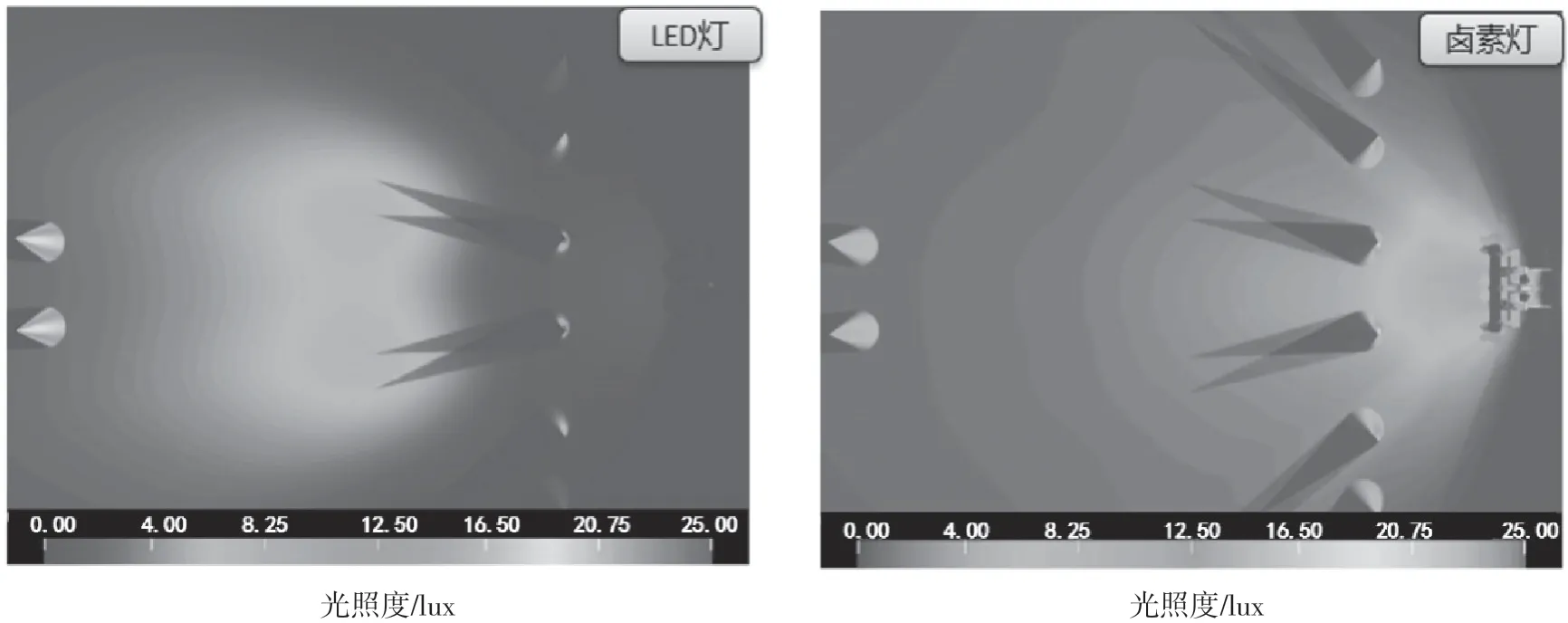
图3 2种灯具水平状态下灯光分布效果图

表3 各个测量点的照度值(单位:lux)
很多矿用机械在灯具的外面会配有灯具保护罩,防止灯具被砸伤。而保护罩会降低灯具的照明效果,遮挡一部分的灯光,因此必须设计1款合适的保护罩;而灯光虚拟仿真技术也可以为该问题提供设计参考的依据,仿真结果如图5所示。从图5的仿真结果可以看出,由于灯具保护罩遮挡了一部分光线,因此本应该被照亮的区域变得非常黑暗,灯光的照度值也变得很低。因此,该灯罩的栅格应该重新设计,否则会遮挡灯光,影响照明效果。
3 结语
在开发新灯具、设计灯具支架、设计灯罩以及检验合规性的过程中,都可以应用3DS Max软件进行虚拟仿真。根据不同的验证需求,灵活地处理模型、设置场景,从而达到验证的目的。从以上案例中可以看到灯光虚拟仿真技术具有很高的应用价值,且该方法方便高效,可以为设计方案的比较以及灯具的选型等工作提供重要的参考依据。因此,在设计土方机械灯具的过程中,可以应用3DS Max软件进行虚拟仿真,从而达到降低开发成本、缩短开发周期以及提高产品使用性能的目的。
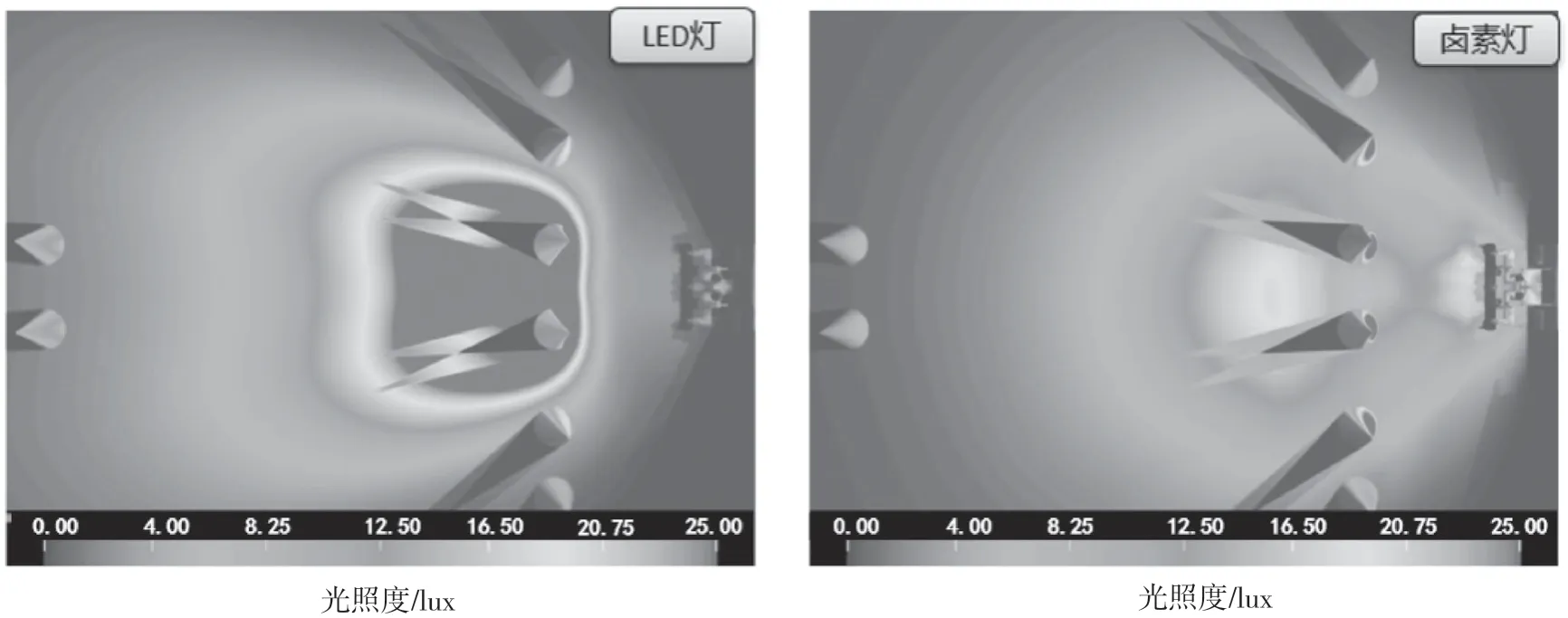
图4 2种灯具在水平向下15°状态下灯光分布效果图

图5 2种灯具在水平向下15°状态下加灯罩的灯光分布效果图
