联合UWB和IMU的矿井内实体定位及语义地图构建系统
2021-04-13郑桂锋徐浩恺胡雄杰韦焯淇
郑桂锋 徐浩恺 胡雄杰 韦焯淇
摘要:煤矿开采包括地面开采和地下开采两种方式,在全世界,地下开采方式占60%,矿井作业依然普遍。为保证矿井下作业人员的安全,需要实时掌握井下人员的位置情况,传统的GPS在矿井环境下由于信号衰减太大已经不再适用。为解决矿井环境下人员的稳定定位、安全保障问题,本文提出了一种联合UWB和IMU器件的矿井内实体定位及语义地图构建系统,介绍了系统总体构成、系统实现的功能和系统各部分的原理及技术实现方法。该系统可以实现矿井下人员的稳定定位,具备一键SOS功能、物理实体的语义地图构建功能,在平时,井下作业人员基于所构建的语义地图可以更高效地工作;在发生危险时,能让相关人员及时地获取到遇险人员的位置信息。
关键词:矿井定位;UWB;IMU;语义地图
1 引言
随着无线传感网络和无线通信知识的逐步完善,各类定位系统得到了快速发展。目前,GPS卫星定位能够满足人们大部分户外定位的需求,但是矿井环境错杂,电磁波传输损耗严重,并不能实现精确有效的定位,并且矿井一旦发生安全事故,矿井内人员的位置信息就十分重要,这一点是卫星定位所不能完成的。目前,矿井内部大多采用射频识别以及无线网络来实现对人员的监测以及定位,但是大多存在信号损耗严重,可检测距离短,精度不高等问题,并非真正意义上的高精度定位系统,这将会导致发生事故时不能精确得到人员的位置信息。因此,本文章提出了一种基于UWB和IMU的矿井内实体定位及语义地图构建系统。超宽带(UWB)定位系统是一套基于架设基站的独立的定位系统,不依赖于GPS,可独立实现精准的室内定位,结合UWB技术的优势,利用UWB构建一套针对矿井环境的系统,可以很好地解决矿井环境下人员的稳定定位、安全保障问题[3]。IMU惯性测量单元则装在用户端,通过监测用户姿态信息来对UWB系统进行定位补偿,然后通过语义地图来实现对矿井下用户的实时监测,不仅能够实现对用户的稳定定位,同时也大大提高了定位精度。
2 系统总体构成
系统的总体构成框图如图1所示。
2.1 数据处理层
数据处理层由计算机上开发的定位软件构成。定位软件的开发基于C#语言进行开发。C#是一个现代的、通用的、面向对象的编程语言,C#也是.Net 框架(.Net Framework)的一部分,可用于编写.Net应用程序,基于.Net框架的组件Windows 窗体(Windows Forms)可以开发出可视化程度良好的Windows应用程序即所述定位软件。数据处理层的定位软件将数据采集层反馈的数据进行集中处理,进行位置信息解算,将位置信息以可视化的形式展现给用户。
2.2 数据采集层
将UWB基站接入数据设备作为数据采集层数据。采集层负责采集UWB基站与标签之间的测距信息,反馈到数据处理层进行位置解算。同时采集IMU检测到的用户的姿态信息,也反馈到数据处理层进行用户行为识别。
2.3 用户层
用户层由用户终端构成,用户终端由一键SOS电路、IMU器件和UWB定位标签封装而成,可安装在用户的身上。一键SOS电路可采用STM32主控,结合按键电路实现,当用户按下SOS按键时,通过UWB进行通信,实现一键报警。而IMU惯性测量单元则实时采集用户姿态信息[4]。
3 系统功能介绍
系统所实现的功能示意图如图2所示。
联合UWB定位与IMU运动状态检测构成总系统,UWB本身便可实现室内定位,但将UWB应用于矿井下定位时,由于矿井环境的不规则,复杂多变,常常会使UWB系统处于非视距(NLOS)的工作环境下,这时候的定位误差较大,所以联合基于IMU的惯性导航对UWB系统在非视距环境下进行定位补偿,可以实现矿井下用户的稳定定位,定位精度也可满足使用需求[5]。而矿井下作业本身就是一件相当危险的工作,很可能发生如瓦斯爆炸,塌陷,渗水等一系列危险事故,这时候所述系统的安全保障功能就可以发挥作用。所述系统集用户主动上报与被动检测上报于一体,最大程度上保障用户安全。当用户遇到危险有反应时间时,便可以通过所述系统的一键SOS功能实现主动上报异常情况。而针对用户晕倒,突然失去反应能力等情况时,基于IMU的用户姿态检测就可以检测到用户的异常状态,同时实现自动上报异常的功能。而通过IMU检测识别用户与矿车,煤矿等矿井内物体的交互动作,将指定的交互动作作为交互物体的语义信息,跟数据库进行匹配识别,便可实现通过指定动作构造矿井内物体的语义地图的功能。
4 系统各部分原理和技术实现
4.1 IMU检测运动状态
IMU器件的姿态解算主要有欧拉角、四元数、方向向量几种方法。其中,四元数法因其全向性、易迭代最常被使用[6]。IMU的姿态实际上就是机体坐标系b和地理坐标系n之间的方位关系,地理坐标系的坐标轴有三种不同的取法,即东北天,北东地,或北西天。以下公式是取地理坐标系为东北天从而推导来的[7]。经过一系列的推导,可以得到公式1:
由公式3,只要确定了四元数,那么姿态矩阵各元素也就确定了,进而可求出姿态角。对于四元数微分方程有龙格-库塔法(RK),还有毕卡求解法。利用求出的姿态角跟数据库进行匹配就可以识别出此时的运动状态。将IMU内加速度计采集到的加速度对时间进行二次积分便可得到用户的实时移动距离,同时配合采集到的航向角信息还可以实现用户航迹推演,达到短时精确定位的效果。
4.2 UWB定位
UWB定位模组如图3所示。
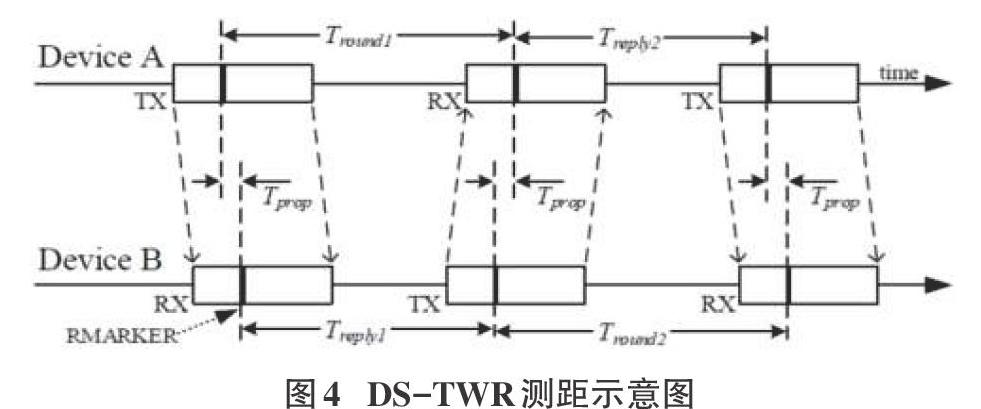
采用UWB进行位置检测与反馈,基站与定位标签之间的测距采用DS-TWR測距方式[7]。DS 测距是在SS测距的基础上再增加一次通讯,两次通讯的时间可以互相弥补因为时钟偏移引入的误差,DS-TWR测距示意图如图4。
对于位置信息的解算选取了TOA定位算法[7]。通过TOA算法完成超宽带定位,一般需要两个步骤,即首先获得超宽带信号从标签到达基站的到达时间测量值,然后利用TOA的测量值换算成距离进而建立方程组并求解。使用残差法或者交叉面积法进行非视距基站的鉴别,为了将非视距基站尽可能排除,可使用交叉面积法进行非视距误差的鉴别[8]。
4.3 语义地图的构建
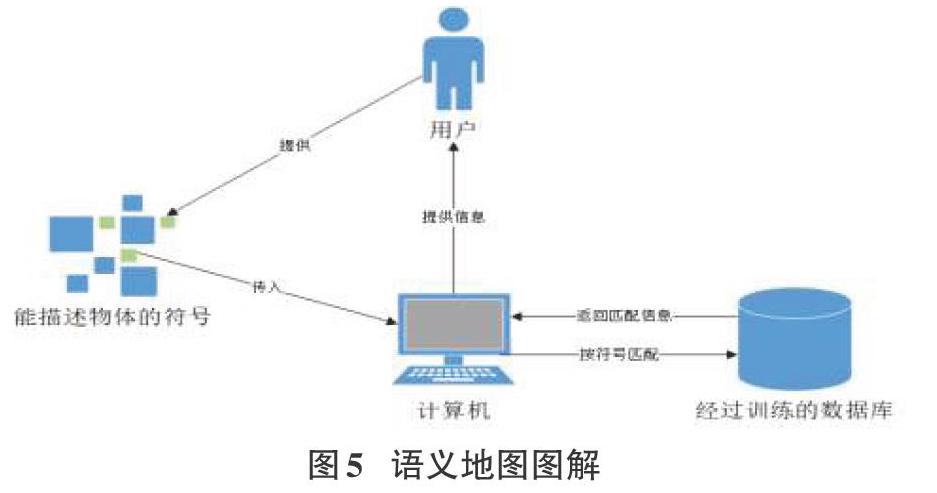
语义地图概念解读: 这里的地图,是指映射。语义就是描述符。在物体识别上,训练数据就是构建地图的过程。首先通过解析物体将它分解成计算机可以理解的符号,不同的物体,有对应的不同的符号表示,我们只需给计算机提供描述该物体的特定符号,将其和训练时构建的数据进行对应,就可以找到对应的物体。语义地图的图解说明[9]如图5所示。
描述物体的符号,即为检测终端检测到的用户的行为状态,如:用户在驾驶矿车时,驾驶的动作就是矿车这一物理实体的描述符号。将这些符号实时地传给计算机,计算机将这个符号作为索引,在经过训练的数据库里查找该物体信息,进行匹配识别,这就相当于识别了该物体,而此时物体的位置信息可以用用户当前的位置信息进行表征,这就构建了矿车的语义地图。(经过训练的数据库:指事先将描述符号与物理实体信息进行一一对应存储。)同理,针对其他与用户存在交互动作的物理实体,通过挖掘用户与其进行交互动作的动作细节也可构建起该物体的语义地图。构建矿井下矿车的语义地图有助于避免矿井下的交通事故,使矿车的运作更加井然有序。构建矿井下煤矿资源分布的语义地图,可以帮助作业人员迅速定位煤矿位置,从全局上把握煤矿资源的分布情况,方便安排工作。
5 结束语
本文阐述了一套基于超宽带(UWB)和IMU的矿井内联合定位系统设计方案,介绍了系统总体构成、系统实现的功能和系统各部分的原理及技术实现方法。利用UWB与IMU互相补偿进行矿井环境下人员的定位,大大提高了矿井环境中对人员进行定位的稳定性。基于人体与物体的交互动作构建出物体的语义地图,将人无意识的动作充分利用起来,在实现对人定位的同时,无须给物体额外贴上UWB标签,便能实现对物体的定位。无论是在平时作业还是发生危险时,该系统都有用武之地。
目前我国大量的矿井还在开采,这还将持续很长一段时间,随着科技的发展,更多更好更完善的针对矿井环境的系统会被开发出来,这也正是作者想看到的。
参考文献:
[1] 朱颖.基于UWB的室内定位系统设计与实现[D].南京:南京郵电大学,2019.
[2] 隋心,杨广松,郝雨时,等.基于UWB TDOA测距的井下动态定位方法[J].导航定位学报,2016,4(3):10-14,34.
[3] 张传锴,李玉良,刘井元.超宽带技术在矿井救援通信监测系统中的应用[J].煤矿安全,2012,43(10):109-110,113.
[4] 孙祥.基于IMU的可穿戴式人体行为识别系统设计与实现[D].南京:南京信息工程大学,2017.
[5] 赵登康.复杂环境下基于UWB/IMU联合定位与导航[D].哈尔滨:哈尔滨工业大学,2016.
[6] 盛广润,高国伟,张伯源.基于四元数的四旋翼飞行器姿态解算研究[J].现代电子技术,2020,43(14):8-12,16.
[7] 王梦石.超宽带通信与光流辅助定位的四旋翼无人机室内导航飞行[D].秦皇岛:燕山大学,2017.
[8] 尤洪祥.超宽带融合光流的无人机室内定位技术研究[D].沈阳:辽宁大学,2018.
[9] 周晓磊.军事应用中位置计算服务关键问题研究[D].长沙:国防科学技术大学,2016.
【通联编辑:梁书】
