SeaBeam 全海深多波束测深系统及应用
2021-04-12李治远豆虎林张海泉
李治远豆虎林张海泉
(自然资源部 第一海洋研究所,山东 青岛266061)
多波束测深系统发射换能器从海面发射较窄的波束条带,通过水听器同时接收从海底不同角度反射的多个回波,得到整个条带的离散水深值[1]。20世纪50年代,多波束测深系统的出现逐渐取代了单波束系统,极大提高了水深测量的效率和精度,降低了测量成本。多波束测深系统被广泛应用于航道测量、港口测绘、海底路由规划、海洋石油勘探和水下矿产资源寻找等领域[2-3]。SeaBeam 系列多波束是海洋调查中的主流深水多波束之一,其波束形成采用米尔斯十字技术[4-7],具备先进的声波发射技术即Swept Beam 技术。同时,通过采纳更先进的底部算法,可使SeaBeam 系列多波束实现船体横摇、纵摇和艏摇等姿态[5-7]的实时补偿。目前我国最新一代综合科考船,如“向阳红01”、“向阳红03”、“科学号”、“雪龙2”等科考船均装备了SeaBeam 系列多波束,但是国内针对该设备可借鉴的文献较少,本文以“向阳红01”船安装的SeaBeam3012多波束(SeaBeam 系列中的全海深型多波束)系统为例分析了其测量技术原理,以期帮助设备操作人员和研究人员更好地发挥该设备测量功能,改善数据处理方法,获取最佳测量成果。
1 系统介绍
1.1 系统组成
SeaBeam3012系统属于深水多波束测深系统,相比浅水多波束测深系统,系统组成更复杂,主要包括:波束发射阵列;水听器阵列;发射控制机柜TCU;接收控制机柜RCU;辅助设备,如GNSS定位设备、艏向和姿态设备、表层声速计和声速剖面仪等,如图1所示。

图1 SeaBeam3012多波束系统组成示意图Fig.1 Composition diagram of the SeaBeam3012 multi-beam system
1.2 收发阵列
波束发射阵列由25个沿着龙骨方向排列且完全相同的模块组成,每个模块包含48个发射元件,按照4列12行分布,行列之间分别相互平行。此阵列可产生指向性声波,在既定角度下的海底回波更强,易于被水听器检测。接收阵列由11个完全相同的模块组成,垂直于航迹方向固定安装,每个模块包含8个陶瓷元件,在2个方向采用屏蔽技术压制旁瓣波束。
1.3 控制机柜和辅助传感器设备
发射机柜主要包括功率放大器、电容模块、高/低压供电单元、网络交换机和电路板等,为所有发射阵列提供触发信号。在控制声波发射的同时,发射单元给水听器阵列和回波处理单元触发信号,使整个系统同步开始工作。高压供电单元在声波发射前为电容模块蓄能,发射时电容模块为功率放大器提供能量,每个发射阵元都有各自的电路系统,每个功率输出通道都是相互分离的,可输出不同级别的能量,产生不同频率和相位的声波信号。
GNSS定位设备为系统提供精确的地理坐标和速度信息,目前在深远海作业中使用星站差分技术可实现高精度定位结果,例如英国Veripos和荷兰Fugro等设备的定位精度可达到亚米级。运动姿态传感器提供发射阵元和接收阵元随船体运动时的横摇、纵摇和艏摇等信息,用于系统姿态实时补偿,法国IXBlue生产的PHINS和OCTANS等光纤罗经系统、挪威Kongsberg生产的MRU5+以及加拿大Applanix生产的POSMV 系统均可提供高精度、高频率的姿态信号。GNSS双天线定位设备和光纤罗经系统可提供艏向数据。表层声速计仅提供发射阵和水听器阵列表面的声速,声速剖面仪提供整个水体不同深度层的声速用于声线跟踪。SeaBeam3012对接入的表层声速计和声速剖面数据实时处理,节约了数据后处理时间。
2 Swept Beam 技术
Swept Beam 技术是一种在波束发射过程中能够实时补偿发射阵列随船体的姿态和位置变化的条带式扫测技术。发射阵列包含大量阵元,且等间距排成多行和多列,Swept Beam 技术使每个阵元均可发射不同于其他阵元且频率和相位特定的声波。在初始状态时,相同列阵元发射声波的频率和相位是一致的,但与其他列不同,一旦开始发射后,每个阵元将根据船体姿态和位置的变化改变各自的频率和相位,从而达到实时补偿的效果。SeaBeam3012使用二维发射阵列实时补偿纵摇(pitch)和艏向(yaw),沿垂直航迹方向每行有12个阵元,每次扫测产生的波束在垂直于阵列平面内横向约11°,纵向(航迹方向)约1.5°。扫测发射最初从条带的某一端开始,然后连续向另一端扫测,最终在1 ping内覆盖整个条带,在扫测过程中会根据不断接收的姿态数据对一个条带内未完成扫测的部分实时补偿纵摇和艏向[8]。
2.1 Swept Beam 技术
Swept Beam 技术得以实现的原因在于其独特的换能器结构和电路设计。Swept Beam 发射阵列相关参数如图2所示,单个阵元的尺寸是0.4λ的正方形,2个相邻阵元横向间距0.5λ,纵向间距0.6λ。发射阵每次发射声波脉冲的宽度是指主瓣扫过某个给定角度所需要的时间,在条带中央时即为主瓣扫过约11°角时所需的时间。越到条带边缘时波束宽度越大,在平面阵列中,波束宽度的变化与主瓣方向的余弦值成反比。在一个条带内为保持相同的脉冲宽度,扫测速率应随主瓣角度的改变而变化。当主瓣轴与竖直方向的夹角θ=60°时,波束横向宽度是θ=0°时的2倍,约为22°。相应地,当θ=60°时,主瓣扫测速率也应为θ=0°时的2倍,这样才能维持脉冲宽度不变。

图2 发射阵列示意图Fig.2 Schematic diagram of transmit array
在一个条带中,每个角度的波束都是由某一列阵元相干生成,每一列阵元的声波频率和相位不断变化才能实现波束主瓣不断改变方向,达到扫测目的。相移正是通过改变每一行中相邻阵元间的相位差Δφ来补偿2个阵元到达海底某点的波程差引起的相位差。从条带一端扫测到另一端时,相位差Δφ从最大Δφmax变为0,再变为最小-Δφmax,或与之相反。实现不断改变相位差的简便方式便是改变线性阵列每个阵元发射声波的频率。
发射阵列相邻两阵元间距为λ/2,则当主瓣轴方向为角度θ时,相邻阵元A和阵元B的波前到达两阵元的波程差造成的相移为180°×sin(θ),如图3a所示。当时间为t1时,波束主瓣指向最左端,此时阵元B与阵元A的相位差为Δφ1;由于阵元A的声波频率比阵元B更高,到达时间t2前,两阵元相位差逐渐减小,直至时间t2时,两阵元相位差Δφ2=0,此时两阵元声波在竖直方向干涉加强,其合成波束主瓣轴竖直向下(θ=0°);当时间为t3时,两阵元相位差Δφ3=-Δφ1,此时合成波束主瓣轴指向最右端(图3b)。扫测过程中,合成波束频率为两阵元发射声波的平均值。将声呐频率带宽等间隔对称分为12组,可将此方法扩展至12个阵元的线性阵列。
波束发射前,设计好各阵元的频率。发射过程中,相邻阵元间的频率差在沿航迹和垂直于航迹的方向上线性变化,这样便可实现波束主瓣在一段时间内从初始角度平滑地扫测至下一角度,这一过程称作一个扫测片段。接着,重新计算阵元声波的后续发射频率,继续向下一个角度扫测。重复该过程,直至完成1 ping扫测。SeaBeam3012发射波束在竖直方向时扫测波束宽度约为11°,若此时设定的脉冲宽度为2 ms,则通过增加阵元间的频率差和相位差,使波束在1 ms内从竖直位置θ=0°处向一侧扫测至θ=5.5°。因为相邻阵元间距为λ/2,相位差为180°,所以使波束主瓣扫测至θ=5.5°所需要相邻阵元间的相位差为180°×sin(5.5°)≈17.25°,相当于2 ms所需相位差变化34.5°,即所需频率差变化47.9 Hz。如果以垂直于航迹方向的发射器阵列中间元件为中心,将此频率差对称分布在两侧,则可以实现合成波束扫测至θ=5.5°。
在波束横向扫测过程中,可根据船体姿态传感器的横摇值调节主瓣轴方向,同时也要进行纵摇和艏向的补偿,波束在沿航迹和垂直于航迹方向都进行扫测,因此每个阵元都有各自的频率和初始相位。各阵元的初始频率和相位能够使波束按照特定的速率扫测,由姿态传感器数据和船体位移确定。一个条带内的不同扫测片段需要不同更新速率的姿态数据,为此,将一个条带的扫测过程分为多个扫测片段,至少进行12次姿态数据更新。因为每个扫测片段开始前都会顾及船体的实时姿态和位移,所以每个扫测片段末端的主瓣指向都在一条线上,最终所有ping都基本平行排列,且宽度一致。
2.2 测深分辨率
典型的分扇区扫描系统需要将频率带宽划分给每个扇区,且为便于回波检测,扇区之间的频率需要一定间隔,这意味着将整个可用的频率带宽划分到所有扇区后,每个扇区仅能得到很小的频率子带宽。以可用带宽2 k Hz、每ping 7扇区的双条幅系统为例,整个带宽可产生2×7=14个频率子带宽,减去子区间间隔,获得每个子带可获得的带宽约100 Hz,则脉冲宽度约为10 ms。随着现在模/数转换器的发展,制约系统测深分辨率的不再是转换器的采样率,而是波束宽度和频率带宽[9]。SeaBeam3012系统基于Swept Beam 技术,每个阵元都使用所有频带资源,在扫测过程中,最小脉冲宽度为2 ms,频宽为500 Hz,则相应的测深分辨率为1.5 m。
3 系统安装和校准
SeaBeam3012系统发射阵和接收阵尺寸较大,呈“T”型分布安装。发射阵列长7.7 m,由25个模块构成;接收阵列长5.5 m,由11个模块组成。其换能器只能采用船载固定方式安装,例如船底嵌入式、船底贴装式和Gondola安装方式[9],“向阳红01”船的SeaBeam3012多波束系统是采用嵌入式方法安装在船底的。安装过程中,要严格控制各模块之间的平整度,同时应确保换能器阵列与船底之间的平整度。安装结束后,应精确测量收发阵列在船体坐标系中的位置和安装倾角[10],输入采集软件中做波束归位计算。
多波束系统校准是执行测量作业中最重要的内容之一。校准的目的在于量化并改正换能器和船体坐标系的残余安装偏差,以获得更精确的水深值并使水深值对应正确的地理坐标。校准之前,应将各传感器与收发换能器的相对位置精确测量。校准内容包括换能器横摇、纵摇和艏摇安装偏角残余误差,SeaBeam3012属于深水测量系统,因此定位系统和测深系统之间的时延对测量结果影响较小,不必校准。校准不同的偏差角,要选择相适宜的地形和地物,以致波束脚印能够分辨出目标地物,尺寸大于波束脚印且边缘凸出的目标物能获得更佳的校准效果[11]。“向阳红01”船配置的SeaBeam3012系统的波束脚印大小与波束指向及水深的关系如表1所示。

表1 波束脚印大小与波束指向角和水深的关系(θac=1.5°,θal=1.0°)Table 1 Relationship between the footprint size and the beam pointing angle and water depth(θac=1.5°,θal=1.0°)
SeaBeam3012系统用于深水测量,其校准时选择的水深对校准结果影响较大。当校准横摇时,选择水深500~2 000 m 为宜;当校准纵摇和艏摇时,选择水深1 500~3 000 m 为宜。利用美国Teledyne CARIS HIPS等商业软件对校准过程采集的数据进行处理,可以获得最佳校准结果。收发阵列是分离的,理论上接收阵列和发射阵列都存在残余安装偏差,但是校准结果应当输入在船型文件的接收阵列中,因为波束坐标系是以接收阵列为参考中心的。“向阳红01”船按照校准流程获得的安装偏角校准结果:横摇偏角为0.59°,纵摇偏角为-0.39°,艏摇偏角为0.42°。
4 实例应用
SeaBeam3012多波束系统在深远海海底地形地貌调查中应用较多,在调查作业过程中,测深和覆盖宽度之间的对应关系及水深测量准确度是调查人员最为关注的两方面内容,也是评价多波束性能优劣的关键指标。多波束测量结果不仅受系统结构、安装偏差等因素影响,同时也受外部传感器的测量精度以及海洋环境噪声、海况、船速和地质情况等因素影响[12]。本文以“向阳红01”船在南海某海域执行调查任务的应用为例,介绍分析SeanBeam3012系统的实际应用效果。本次测量实例中,系统配套使用的外部传感器有:英国Veripos公司生产的LD7高精度星站差分定位系统、法国IXsea公司生产的PHINS光纤姿态传感器、加拿大AML公司生产的Minos声速剖面仪和Micro SV 表层声速计。这些传感器都是市场上各类调查设备中的主流产品,基本代表了行业产品的最高水平,完全满足SeaBeam3012系统对辅助传感器设备的性能要求,最大程度地降低了外部传感器对多波束测深的影响。调查实施前,测量在不同航行速度下“向阳红01”船的噪声级,当船速为2~12 kn时,测得背景噪声为43~50 dB。本次调查作业过程中,海况为三级,同时在多波束测量期间开启浅地层剖面测量仪,结果显示测量区域属于泥质底质。测量过程中截取的部分采集画面中显示的条带空间分布如图4所示。
由图4可以看出,各条带内的波束脚印几乎是相互平行排列的,每个条带垂直于航迹分布,且同水深的条带覆盖宽度几乎一致。基于Sector Scan技术的多波束测深系统往往会产生条带内各扇区间前后重叠或左右覆盖不连续等现象,SeaBeam3012基于Swept Beam 技术进行实时姿态补偿,实现了波束脚印在沿航迹方向等间隔分布,有效地保障了测深分辨率沿着航迹方向的一致性。

图4 SeaBeam3012采集时条带空间分布Fig.4 Spatial distribution of the time swaths acquired by SeaBeam3012
多波束测深系统的测深值与对应覆盖宽度之间的关系是进行测线间距布设的重要依据。在本次测量过程中,统计了1 000~4 000 m 水深范围内SeaBeam3012系统的测深值与对应覆盖宽度数据并绘制成图,与设备制造商德国ELAC Nautik公司提供的SeaBeam3012多波束系统的测深(Z)与覆盖宽度(W)关系图进行对比,结果如图5所示。
由设备制造商提供的测深和覆盖宽度的对应关系(图5)可知,覆盖宽度约为对应测深值的5.5倍,而本次实际测量的覆盖宽度约为测深值的3.5倍,这是因为:设备商提供的测深和覆盖宽度对应关系并非实测结果,而是在背景噪声为40 dB、脉宽为10 ms、吸收损失为1.2 dB/km 且在最大能量和最大发射开角(150°)等理想条件下的模拟结果;本次实际测量中,船速为10~12 kn,背景噪声为45~50 dB,发射开角为120°(为抑制边缘波束的噪声),加之采用嵌入式安装的换能器,它受气泡影响较大,所以最终实际测量的宽深比较小。
水深测量准确度评估指标是检验多波束测深系统测量精度的重要依据。在《海洋调查规范:第10部分海底地形地貌调查》[13]中,水深测量准确度评估指标的定义为:

式中,M是重合点水深不符值中误差,d i是主测线和联络测线在重合点i处的水深不符值,n是主测线和联络测线的重合点数[13]。本次测量过程中按照测量规范布设了主测线和联络测线,选择其中的5条联络检查测线(Ⅰ~Ⅴ),经过粗差剔除后进行准确度评估指标计算,结果如表2所示。
由表2可知,SeaBeam3012多波束测深系统的超限点占比结果均小于4%,这完全符合《海洋调查规范:第10部分 海底地形地貌调查》[14]中对测量准确度评估的要求(超限点占比的限差为10%,水深大于30 m时的主检不符值的限差为水深的2%)。
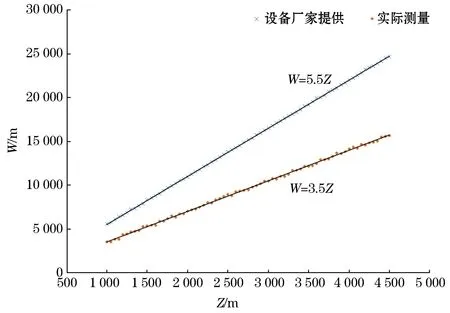
图5 SeaBeam3012系统测深与覆盖宽度关系Fig.5 Relationship between the bathymetry and the covering width of the SeaBean3012 system
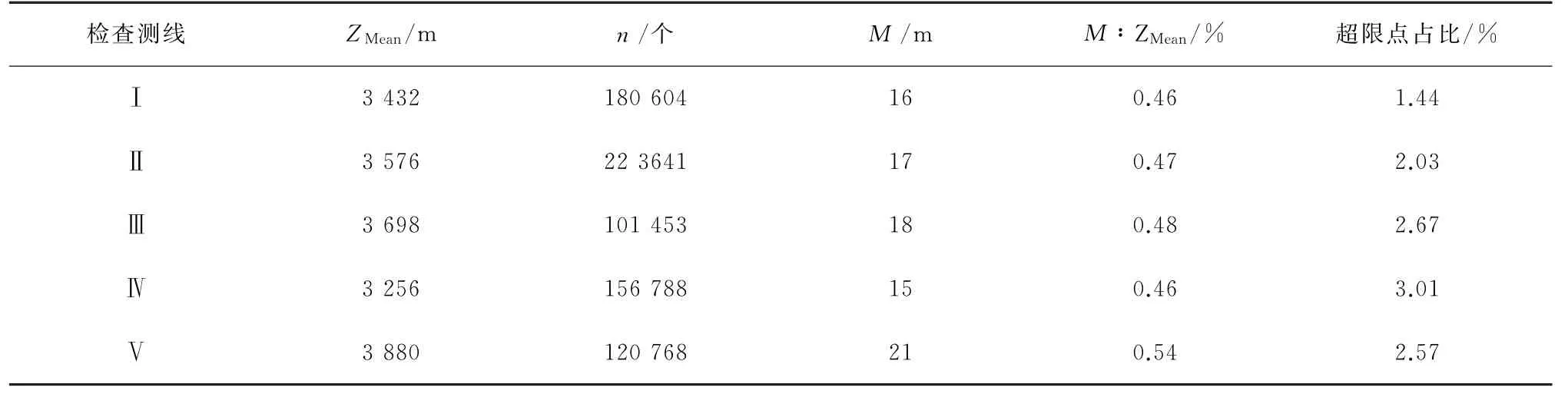
表2 测深值准确度评估结果Table 2 Results of the accuracy assessment
5 结 语
首先介绍了SeaBeam3012全海深多波束测深系统的硬件组成,结合硬件组成深入研究了Swept Beam技术,分析了该技术采用频移和相移方式实现波束在整个条带内的扫测并进行姿态实时补偿的过程。然后,对SeaBeam3012多波束测深系统的安装和校准方法开展分析讨论,进而分析波束脚印大小与波束角、水深的关系,该关系可作为校准时选择适宜地形地貌的参考。最后,以“向阳红01”船安装的SeaBeam3012多波束测深系统在南海某海域执行测量任务为例,分析了实际测量过程中系统测深与覆盖宽度的对应关系及系统的测深准确度评估指标。得出结论:
1)在水深1 000~4 000 m 范围内,SeaBeam3012多波束测深系统的测深和覆盖宽度的对应关系与设备商给出的结果存在较大差异,该现象是由海况、设备安装方式、船体噪声、海底地质和发射能量及开角等多方面因素造成的。
2)SeaBeam3012多波束测深系统的准确度评估指标远小于《海洋调查规范:第10部分 海底地形地貌调查》中要求的限差,完全符合测量规范中的要求。
3)SeaBeam3012多波束测深系统获得的测深条带在空间排列整齐,完整均匀的覆盖效果十分有利于测量船按照前期的测线规划开展调查,避免后期补测造成的船时浪费和成本增加。
