电压波动和闪变分析自适应控制研究
2021-04-11时云洪
时云洪 张 龙 王 楠
(贵州电力设计研究院,贵阳 贵州 550002)
供电系统在我国现代经济发展过程中发挥着重要作用,据统计,国家电网每年因电压波动和闪变造成几千万的经济损失。因此,针对电压波动与闪变的检测,以及具体问题的处理需要强化,确保电网在运行期间的可靠性与安全性[1-3]。
自从静止同步补偿器(STATCOM)诞生以来,各国的工业以及科研单位都对其表现出浓厚的兴趣,使其得到了飞速的发展以及应用,柔性交流输电系统的核心是STATCOM,在电力系统中占据着重要位置[4]。在对输电系统传输容量的提高上、在电力系统稳定运行的改进上、在功率振荡问题的抑制上都具有很重要的作用。然而,STATCOM是一个非线性的而且强耦合的系统,而面对如此的非线性的控制对象且复杂化控制策略的设计。文献[3-5]是使用PI控制,文献[6]表现为非线性鲁棒控制,把抑制功角、频率振荡,增强系统的阻尼作为控制目的。PI控制参数的控制难度较高,当参数发生变化或者出现扰动时比较敏感,并不是非线性鲁棒控制,此类的方法因其复杂性也难以让成熟设计人员学习掌握。相对而言,在非线性控制中有一类特殊情况是滑模变结构的控制方法,非线性的一个重要表现——不连续性的控制输入在其中得以体现,针对系统的状态不同,在动态控制期间,控制输入量需有目的的控制输入,这样就可以在既定轨迹下,滑动模态进行轨迹运动。这种方法相比于非线性控制方法,具有良好的控制规律,鲁棒性对于模型参数的变化和外部扰动来说较强,因此,STATCOM的无功补偿控制设计策略,是建立在滑模变结构控制的方法基础上的。
滑模控制虽然具有良好的控制性能,但是也会存在较多问题,比如固有的抖振问题,对于控制期间的稳定与精准度有很大影响,从而实际应用中的性能有所降低。目前,学者们关注的重点是在除滑模变结构的抖振消除期间,如何利用好先进技术是关键所在,这个问题也是STATCOM系统高性能控制的研究重点。为实现滑模控制与神经网络控制的有效结合,在实际应用中,可以通过神经网络技术的自学习能力,让其在靠近任意非线性函数期间更加精确,确保应用效果。本文将RBF神经网络控制与等效滑模控制相结合,以实现STATCOM系统高性能控制。为消除变结构控制存在的高频抖动,本文采用神经网络-滑模等效控制方法,利用计算机仿真验证其有效性及正确性。
1 神经网络-滑模控制器设计
双闭环电流控制方法在STATCOM控制中的应用比较广泛,内外环控制结构是所选择的方法。外环指直流电压环,反馈PI控制是较常使用的方法,在对外环电压指令的自适应控制的实现过程中,文章所选择的方法为滑模控制。内环指的是无功电流环和有功电流环,有功电流控制的参考输入为直流电压外环。内环控制是文章所选择的方式,输入为有功电流和无功电流,具体的控制框图如图1所示。

图1 STATCOM直接电流双环控制原理
2 电压环滑模控制器
根据STATCOM的数学模型可以改写成空间状态方程:

在公式2中,D、δ、id、iq、Ude、Us、ω、R、R分别为逆变器的输出一侧线的电压的有效值和直流一侧的电压的比值、电压和电网电压的相位差、dqo坐标系下STATCOM所吸收的有功电流、STATCOM直流一侧的电压、STATCOM直流一侧的电压、电网线的电压的有效值、电网电压的基波角频率、STATCOM有功损耗下的等效的电阻、STATCOM串联电抗器的感抗值。
由于本文将电流环作为控制的重点,所以在电压环只采用传统滑模控制的设计方案。取电压跟踪误差为状态变量:

3 电流环滑模控制器

4 RBF神经网络控制
径向基函数神经网络(RBF)的提出时间为于20世纪80年代末,J.Moody 和C.Daken 对这种神经网络进行了研究,发现具有单隐层的三层网络结构,可以在任意精度下逼近任一连续函数。在对UI滑模抖振的问题进行有效改善与消除期间,需要对滑模控制与RBF进行合理结合。文章在分析时,对切换增益进行估计时需使用RBF,干扰项的消除可以同切换增益完成,这样就能对抖振进行消除,确保负载干扰和参数变化的鲁棒性良好。

5 仿真实验与结果分析
灯塔-坚基线系统电压波动和闪变的抑制在实际工程中应用的可行性问题进行分析期间,为构建起灯塔-坚基线系统电压波动和闪变抑制模型,需要在STATCOM基础上合理使用MATLAB软件,然后对神经网络-滑模控制与传统PID控制在电网电能质量控制方面的性能进行躲避。具体如图2所示。
该模型是根据实际的工程线路原型进行设计与建模的。模型主要由220 kV电源、220 kV/110 kV变压器、35 km线路、STATCOM本体以及STATCOM控制器等模块组成。STATCOM是由GTO构造而成,容量为3 Mvar,这样就可以对10千伏配电系统进行有效调节。配电系统的负载容量一个是3 MVA,另一个是1 MVA。电源母线电压恒定,标幺值、低压母线电压分别为1.08、10 kV;STATCOM装置参数(标幺值)R、L、C、Vs、ω的值分别为0.1、0.15、0.8、1.0、314。
在上述分析下,可以得知在维持直流侧电压有名值的恒定时,通过稳定运行下的时STATCOM来进行调节。当电源产生电压之后,高于或者低于系统电压、STATCOM生成(或吸收)无功功率。电源电压大小、变压器漏电抗会对无功功率的数量产生影响。系统性能仿真的开展是建立在神经网络-滑模自适应控制基础之上的,进而实现对电流的有效控制。

图2 基于STATCOM无功补偿的输电线路
在220 kV母线电压突变与闪变视域下,通过仿真实验对STATCOM控制系统的动态响应性能问题进行分析。系统仿真时间为1 s,电网电压会在0.3 s时发生变化,会从1 pu升高到1.05 pu,然后在持续0.1 s之后,在0.4 s时,系统电压又下降到0.95 pu,继而在0.5 s时突增到1.08 pu;在0.6 s时,系统电压会上升到1 pu。通过整个过程的反应来看,电网电压的波动情况可以在整个仿真过程显示。通过这样的方式,对STATCOM系统对电网的调节作用进行检验。控制器参数:滑模控制电压环c1、ε、k的值分别为0.5、0.1、2;电流环c1、η的值分别为0.75、0.8;1-12-1结构为RBF网络采用的结构,基函数参数c、σ的值分别为1.3、2.5。动态响应如图3、图4所示。

图3 STATCOM交流侧单相电压/电流波形

图4 STATCOM直流侧电压调制波形
从上面的图形中可以观察出,STATCOM在电网电源电压突变时,反应速度较快,对STATCOM功率的输出情况调整是通过交流侧电流的控制实现的,这样就可以在控制期间,对功率变化情况进行调节,实现电网电压的稳定运行。分析图5、图6,能发现在STATCOM静止无功补偿调的基础上,电源输出电压的波动比较频繁,但是电网无功能够迅速补偿到参考指令水平,为负载提供稳定优质的电能。

图5 电网无功控制性能

图6 STATCOM有功与无功补偿

图7 负载消耗的有功与无功
为了深入研究电网系统的动态响应,图7给出了负载消耗的有功与无功功率。负载消耗的有功与无功功率在电网电源电压突变情况下,也会发生变化,这时反应速度比较快,STATCOM直流侧可以通过对放电与吸收电的作用来对电网电压波动情况进行调节,从而对电网电压的不稳定情况进行抑制,纯电阻态和纯电感态之间在STATCOM直流侧的不断循环下,可以满足负载有功与无功功率稳定性的目的。
传统的PID控制方法,相比于本文的方法,也就是滑模控制方法相对落后一些,在对PID控制仿真测试期间,是建立在同等实验参数设置基础上的。控制器参数电压环、电压环的值分别为35、1 000;电流环、的值分别为5、20。具体图8~10所示。
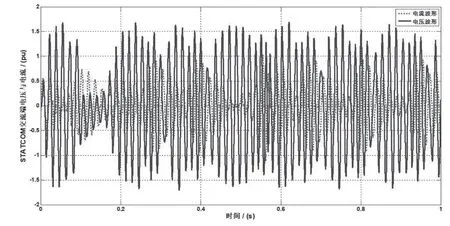
图8 STATCOM交流侧单相电压/电流波形
图9 STATCOM有功与无功补偿

图10 负载消耗的有功与无功
在本文的对比分析下,可以看出神经网络-滑模控制方法优势明显,整体性能要好于传统的PID控制法。所以,神经网络-滑模控制在实际应用中具有良好的控制效果。
通过本文的研究可以得出:相比于传统的PID控制器,神经网络-滑模控制器可以对系统无功功率进行补偿,具有较强的学习能力、适应能力,控制效果更好。电网电压波动的补偿,可以在神经网络-滑模控制器下显现出来,确保STATCOM系统的控制效果良好。
6 小结
非线性控制是STATCOM无功补偿系统的一个主要表现,且相比于传统的控制器效果更好。为确保系统控制性能,需要通过神经网络-滑模控制器的构建与应用达到效果。本文的创新点为电压与电流环控制期间,可以合理应用滑模控制器。在对性能进行实验期间,是通过MATLAB仿真平台完成的,并在研究后可以得出,STATCOM无功补偿系统可以得到神经网络-滑模控制器的有效控制,为确保电网的稳定运行,提供优质电能,需要实现电网系统的可靠运行。
