基于投影的施工图像与BIM模型配准叠加方法
2021-04-10侯学良薛靖国
侯学良,薛靖国,王 毅,曾 颖
基于投影的施工图像与BIM模型配准叠加方法
侯学良1,薛靖国1,王 毅1,曾 颖2
(1. 华北电力大学经济与管理学院,北京 102206; 2. 国网绵阳供电公司,四川 绵阳 621000)
为了将计划式建筑信息模型(BIM)中的施工过程模拟与施工现场状态相结合,以直观比较建筑结构施工阶段实际施工进度与计划进度之间的偏差,提出了基于投影模型的施工图像与BIM模型配准叠加方法。首先,在对相机投影模型和相机标定方法分析的基础上,建立了施工现场图像与相机成像平面的坐标映射关系;其次,利用Navisworks应用程序接口开发了建筑施工图像叠加管理系统,实现了施工图像与BIM模型平面野的叠加;然后,基于叠加图像组之间的变形特点,提出了评判配准效果的评价模型;最后,以某商住楼施工现场为例进行了实证分析。实验结果表明,叠加效果最好的方式为在着色模式下,高亮显示待观察BIM模型构件,并将上层图像透明度设置为35%~65%之间;当拍摄姿态为平视时,配准效果明显优于仰视时的配准效果;所有相机的叠加效果偏差都在可接受误差内,该方法能够有效地实现施工图像与BIM模型的配准,直观地反映建筑结构施工阶段计划模型与实际施工状态之间的偏差。
建筑信息模型;施工过程模拟;施工图像;相机标定;图像配准叠加
大型工程项目具有投资数额大、建设周期长、涉及主体多等特点。传统人工管理方式耗时耗力且容易产生错误,已无法应对当前大型工程项目的现代化管理需求[1]。尤其是在施工阶段,现场施工具有流动性强、协作性高、施工周期长等特点,管理者很容易受到各种因素的影响。所以,如何提高信息反馈速度,及时了解施工现场状况,是现代建筑工业发展所面临的挑战。
近年来,BIM技术的迅猛发展丰富和拓展了工程领域的信息管理方式,为解决工程项目中存在的诸多问题提供了新的解决方案[2]。BIM技术打通了不同软件之间的连接障碍,能够将仿真模型与施工进度管理软件连接起来,从而实现对施工过程的模拟[3]。与传统模型相比,基于BIM的施工过程模拟能够将施工现场与时间维度统一起来,将施工条件与进度直观地展示在管理者面前[3]。这种直观的模拟过程不仅有利于对复杂环节的形象描述,更有利于问题的提前识别。然而,现有的基于BIM的施工过程模拟是一种计划式的模拟。计划式的模拟只预测计划中可能存在的漏洞,而不能反映实际施工过程中存在的问题。这不仅不利于工程项目施工现场的高效管理,也阻碍了工程现代化管理水平的提高。
因此,为了直观展示建筑结构施工阶段计划模型与实际施工状态之间的偏差,实现BIM模型和施工图像的融合,本文提出基于投影模型的施工图像与BIM模型配准叠加方法。该方法基于三维世界与成像平面之间的映射关系,构建了BIM模型与施工图像之间的映射关系模型,并基于Navisworks应用程序接口(application programming interface,API)实现了BIM平面野与施工图像的叠加;根据叠加图像组之间的变形特点,提出评判配准效果的评价方法和指标,以验证配准方法的有效性。
1 施工过程模拟研究现状
BIM技术出现前,施工管理主要依赖于管理人员的综合素质与经验,管理工具以横道图、CAD、办公软件等简单的工具为主。这种传统的管理方式存在诸多问题,包括:①施工管理的科学性不高,管理随机性较强;②各建设方之间、各专业之间信息协同不足,信息沟通不及时、不顺畅,易形成“信息孤岛”;③二维图纸可视化程度低,信息化、集成化不足;④施工过程模拟仿真程度差,复杂工序的施工技术交底困难。这些问题不仅制约着建筑工程项目的精细化管理,而且严重影响了我国建筑行业管理水平的提高。
随着BIM技术的迅猛发展,大量学者针对BIM技术在建筑工程中的应用做了大量研究。在施工过程展示方面,先后进行了基于BIM的4D/5D虚拟施工、方案论证、技术交底等研究[3]。章伟等[4]应用BIM技术对大跨度钢结构进行虚拟仿真施工,模拟施工工序,达到方案评估、应力检测、质量控制等目的。张剑涛和姚爱军[5]应用BIM技术对地铁站工程进行了3D可视化建模、搭建施工协调平台,并对PBA工法进行了施工虚拟仿真。周桂香等[6]将BIM应用于某医院综合楼的施工阶段,进行了施工场地规划模拟、地下工程施工方法模拟、桩基施工方案模拟、智能化停车库的施工模拟和钢结构连廊的施工模拟等。唐红等[7]将BIM技术应用于大型深基坑工程中,进行了工程可视化设计、二维出图、碰撞检查、施工进度4D仿真模拟、工程量自动统计及核对、基坑监测等一系列内容。诸多学者的研究表明,基于BIM技术的施工模拟,能够将施工条件与进度直观地展示在管理者面前,允许不同专业在同一模型中就具体问题展开沟通与交流,通过虚拟施工尽早发现施工中的问题,并对反应出的问题及时调整,有利于资源的优化配置,降低施工成本,减少现场返工。
上述研究成果都是在计划阶段或施工前进行的模拟,且取得了很好的效果,但施工现场是一个复杂多变的环境,很多因素影响着施工的过程,造成实际施工现场与计划模型不一致的情形。为了实现对工程项目真实有效的管理,需要施工管理者更关注计划与实际施工状态之间的差别。为了监督实际施工过程,许多项目中采用相机来记录施工过程与状态,但也只停留在了对施工过程的记录,并未将其用于发掘信息。如何将相机记录的实际施工状态与BIM模型融为一体,进而反映实际施工状态和计划状态之间的差别,这便是本文旨在解决的问题。
针对这一问题,国内外许多学者做了形式多样的尝试。针对室内施工,DENG等[8]将BIM和计算机视觉相结合用来检测室内瓷砖施工进度;LI等[9]通过分割深度相机产生的点云来推断室内环境。针对室外施工,GOLPARVAR-FARD等[10]将增强现实技术与BIM模型相结合用于监控施工现场施工进度。本文为直观比较建筑结构施工阶段计划模型与实际施工状态之间的偏差,提出基于Navisworks的解决方案,开发可用于实时监控施工进度与计划进度偏差的图像叠加系统。
2 模型构建
基于投影模型的施工图像与BIM模型配准方法框架如图1所示。在计划模型中,通过投影模型将三维的BIM模型映射到平面上;在已完工程模型中,使用相机记录施工现场已完成工作的实际状态,以图像形式输出。BIM模型为三维模型,为描述BIM模型在相机视野中对应的映射图像,引入平面野的概念,以下简称BIM平面野。在投影模型的作用下,施工现场图像与BIM平面野成像视角相同,因此通过叠加施工现场图像与BIM平面野,并调整不同图像的透明度,可以进行施工现场与BIM模型的对比展示、施工现场的实时监控以及计划与实际状态偏差的识别。
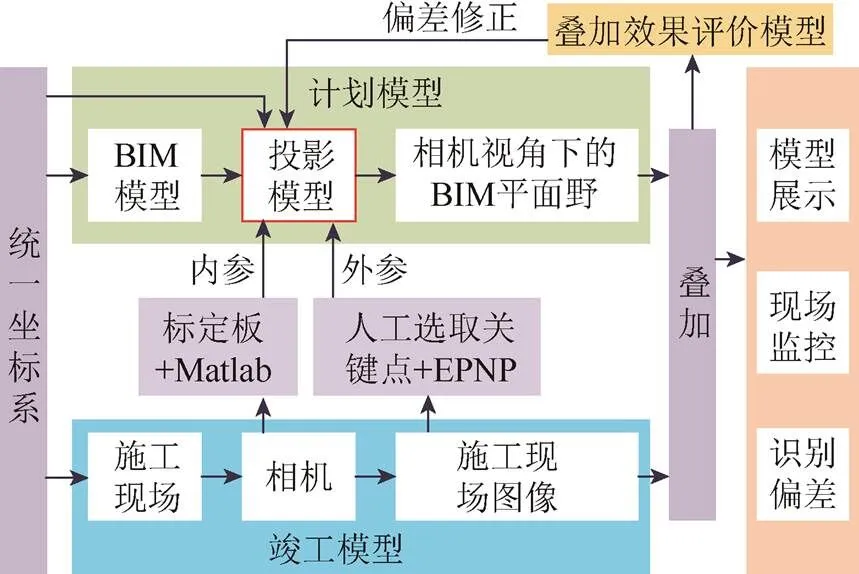
图1 方法框架
理想状态下,施工现场图像与BIM平面野完全叠加,但用于确定相机位置及视角参数的关键点的二维坐标通过人工估计产生,数据精度无法精确控制,所以叠加后的图像之间具有偏差。为了评估这些偏差并降低偏差对配准带来的影响,设计了叠加效果偏差模型。叠加效果评价模型通过计算位移、旋转和缩放偏差来综合判断配准效果,并通过这些偏差修正投影模型,进而使BIM平面野和施工现场图像尽可能完全叠加。
2.1 投影模型
相机标定的目的是确定相机投影模型,相机投影模型是指三维空间中点与相片上像素点之间的映射关系。在相机投影模型中,共有4个坐标系:世界坐标系、相机坐标系、成像平面坐标系和像素坐标系。世界坐标系也称为测量坐标系,是一个三维直角坐标系,以其为基准可以描述相机和待测物体的空间位置。世界坐标系由人为设定,物体世界坐标系中的坐标为(X,Y,Z)。相机坐标系也是一个三维直角坐标系,原点位于镜头光心处,,轴分别与相面的两边平行,轴为镜头光轴,与像平面垂直,物体在相机坐标系中的坐标为(X,Y,Z)。像素坐标系是一个二维直角坐标系,反映了相机芯片中像素的排列情况。原点位于图像的左上角,轴和轴分别于像面的两边平行。像素坐标系中坐标轴的单位是像素(整数)。像素坐标系不利于坐标变换,因此需要建立成像平面坐标系,其坐标轴的单位通常为毫米(mm),原点是相机光轴与相面的交点(称为主点),即图像的中心点,轴和轴分别与轴和轴平行。故2个坐标系实际是平移关系,即通过平移就可得到。4个坐标系的关系如图2所示。
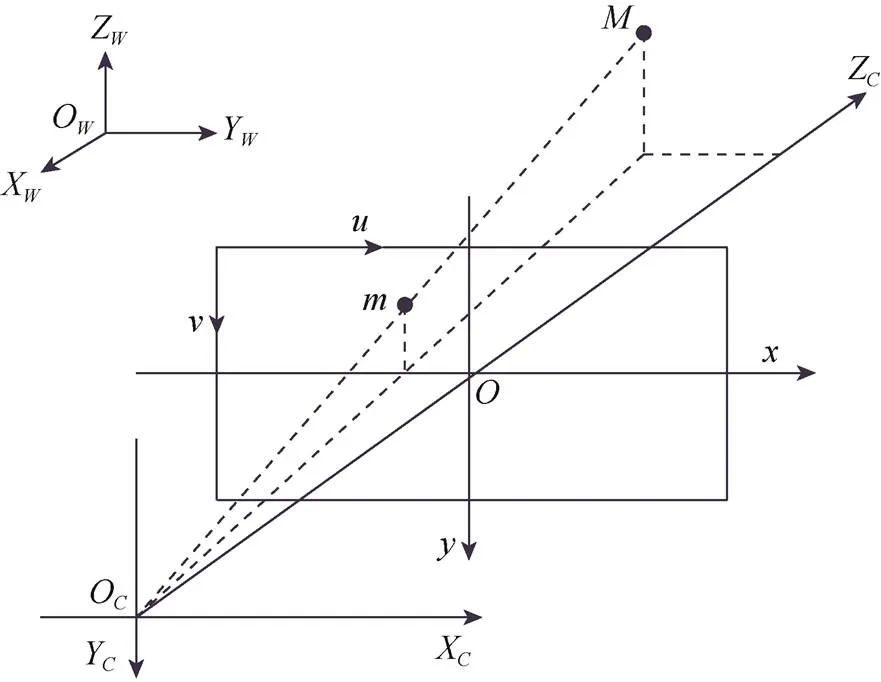
图2 相机投影模型中4个坐标系的关系
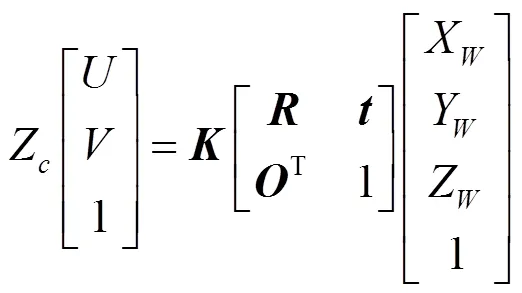
根据4个坐标系之间的空间位置关系,并综合考虑相机在投影过程中产生的畸变等因素,推导得出相机投影模型为

2.2 相机标定
相机标定可以确定相机的内外部参数,并可据此计算出拍摄对象三维点与图像二维点之间的映射关系,是三维重建的必要环节。相机标定在三维计算机视觉技术中起着至关重要的作用,差的相机标定过程可能会导致图像中的缺陷(如失真),进而影响信息的可靠性和准确性。因此,相机标定通常是计算机视觉应用中最为关键的过程[11]。
2.2.1 内参标定
张氏标定法[12]介于传统标定法和自标定法之间,标定物可简单表示为棋盘格,克服了传统标定法需要的高精度标定物的缺点。同时,相对于自标定而言,该方法提高了精度,便于操作。张氏标定法被广泛应用于计算机视觉方面取得了良好的效果,因此本文将基于张氏标定法并使用Matlab中的相机标定工具(camera calibrator)对相机进行标定。
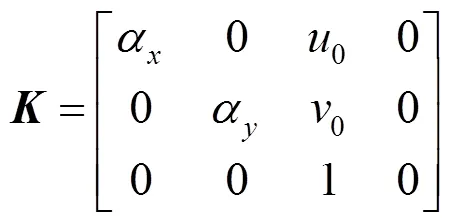
采用张氏标定法可确定相机投影模型中内参矩阵。首先制作标定板,共6×8个黑白相间的方格,每个正方形小格的边长为34 mm。然后使用相机从不同角度拍摄标定板,并使用Matlab中的相机标定工具对相机进行标定,如图3所示。
通过Camera Calibrator工具求得内部参数矩阵后,像素点位置和世界坐标系中的坐标之间的投影关系为
2.2.2 外参标定
在借助标定板测得相机的内部参数后,固定相机位置和视角以获得相机的外部参数。相机外部参数的获取有2个途径:①人为估计相机位置和视角方向,计算相机外部参数,并通过叠加效果评价模型来调整相机外部参数矩阵,这种方式适用于相机视野范围内已知点不易确定的情形;②在图像中选取已知坐标的关键点,通过这些关键点的三维坐标及其在图像中的像素坐标求解相机外部参数,这属于Perspective-n-Point问题,可通过透视三点问题(perspective-three-point, P3P),高效n点渗透(efficient perspective-n-point,EPNP)等方法计算得到。其中,EPNP算法具有时间复杂度低、精度高、鲁棒性好等特点,是目前最高效的摄像机位姿估计算法之一。本文采用EPNP算法,通过在Visual Studio上编写C++代码,用于计算相机外部参数矩阵。
为获得相机外部参数,首先在相机位置和视角固定后,拍摄一张现场图像;然后在现场图像中人工设定若干已知三维坐标的关键点(关键点在二维平面中应分布均匀且在三维空间中不能位于同一平面),并估计关键点的二维坐标;最后通过编写的程序计算相机外部参数矩阵。为得到更为精确的配准效果,相机的拍摄角度应尽可能展示建筑物的立体形象,即避免垂直拍摄建筑物的一个立面;关键点数量不应少于4个,且20~30个为宜,过多的关键点增加工作量且对配准效果提升不明显;关键点的选取应尽可能在二维图像上分布均匀且在三维空间中不过多集中于同一个平面。
至此,投影模型中的所有未知参数全部获得,世界坐标系中的三维目标与图像中的像素点之间的映射模型成功建立。
2.3 图像叠加
为获得与施工现场图像视角相同的BIM平面野,首先将=0/2,=0/2,Z=-代入相机投影模型中,求得相机在世界坐标系中的坐标,即相机位置;指定建筑立面的一个坐标,求得一个观察点位置;通过Navisworks API设定相机位置和观察点位置,并调整视野大小,得到与施工现场图像近视视角,即BIM平面野。

图3 相机标定
为了实现施工现场图像与BIM平面野的叠加,本文利用Navisworks API基于.NET Framework 4.6.1框架开发建筑施工图像叠加管理系统,通过控制2种图像显示模式来调节叠加效果,系统界面如图4所示。
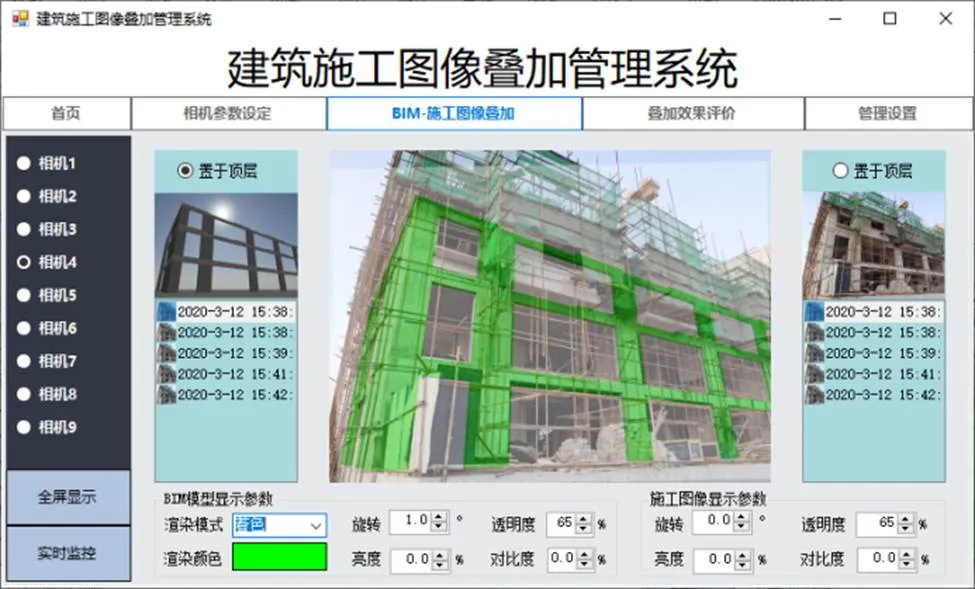
图4 叠加
系统界面左侧可选择要显示的相机,右侧分为4部分:两侧分别为不同时间点的BIM模型和施工图像,中间为2种图像的叠加结果,下方可设置2种图像的显示参数。BIM模型的显示参数包括:渲染模式、渲染颜色、旋转、透明度、亮度和对比度;施工图像显示参数包括旋转、透明度、亮度和对比度。
2.4 叠加效果评价模型
叠加效果评价模型用来评价BIM平面野与施工现场图像配准情况,为批量校准投影模型提供校准依据。本文通过综合度量BIM平面野与施工现场图像之间的位移偏差、旋转偏差和缩放偏差来判断叠加效果,叠加效果评价模型如图5所示。
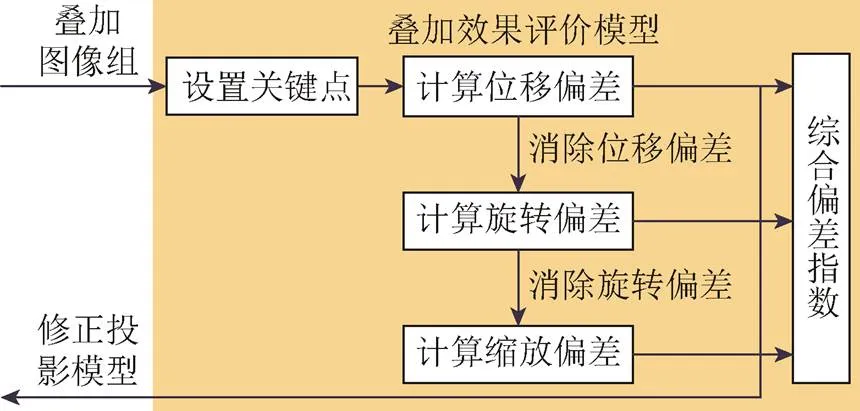
图5叠加效果评价模型
为对比施工图像和BIM平面野之间的偏差,设计5点法计算和修正位移偏差、旋转偏差和缩放偏差。首先在BIM平面野中设置5个关键点,并将中心点与其余4点连接成4条线段,如图6所示。在施工现场图像中寻找5个关键点的对应点,以同样的方式连接4条线段,如图7所示。5个关键点的选取规则为:优先选取外参标定过程中设置的关键点;中间点从图像中心附近选取,其余4点从图像4个角附件选取;应选取施工现场图像中边界较为清晰关键点。
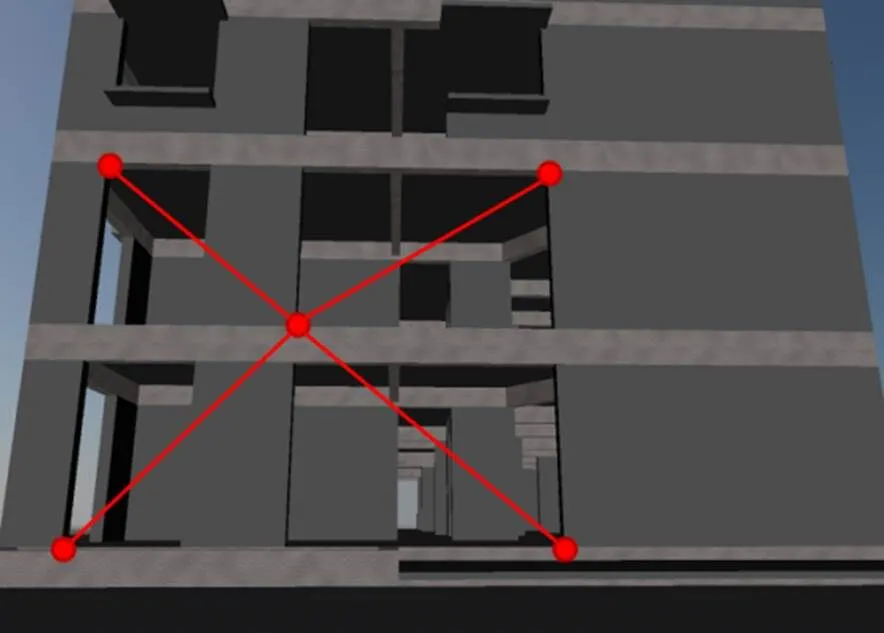
图6 BIM平面野关键点

图7 施工现场图像关键点
位移偏差包括轴和轴2个方向的偏差,在每组叠加图像中测量BIM平面野中心点及其在施工现场图像中对应点之间的水平位移(x)和垂直位移(y)。计算位移偏差后移动图像消除位移偏差,通过计算4组线段之间的夹角可度量旋转偏差()。计算旋转偏差后旋转图像消除旋转偏差,通过4组线段长度差值度量缩放偏差(S),即
其中,l为第组图像第条关键线段在施工现场图像中的长度;Dl为第组图像第条关键线段在BIM平面野和施工现场图像中长度的偏差。



2.5 偏差修正
由于Navisworks中相机参数需要人工判断和调整,得到的BIM平面野与施工现场图像并不能完全叠加,因此需要通过偏差修正来改善叠加效果。
偏差修正的数值取5点法计算得到的3种偏差数值的平均值。3种偏差的修正方法分别为:①位移偏差可通过Navisworks API修改观察点位置实现;②由于Navisworks中旋转角度为整数,所以旋转偏差整数部分通过Navisworks API修改相机滚动角度实现,而小数部分通过调整叠加系统中的旋转角度实现;③缩放偏差通过Navisworks API修改相机视野范围实现。
偏差修正是一个迭代的过程,每次迭代包括关键点选择、位移偏差计算、位移偏差修正、旋转偏差计算、旋转偏差修正、缩放偏差计算和缩放偏差计算7步,按顺序进行,直到综合偏差指数达到满意的结果。
3 案例分析
在完成配准模型的构建后,本研究以某商住楼为例进行实证分析,建筑共计14层,建筑面积9 808.73 m2,占地面积722.05 m2,结构形式为框架剪力墙结构。首先根据施工图纸在Revit软件中绘制商住楼的三维模型,并将其导入Navisworks中以便调整试图和模拟施工。通过张氏标定法测得6台相机的内部参数后,将相机分别固定于建筑物四周不同角度,用于拍摄局部和全局图像,记录施工过程。根据固定相机采集的图像,选取图像中的20~30个已知点,并利用EPNP算法求解相机外部参数,建立投影模型,计算相机的相对位置和拍摄视角。在建筑施工图像叠加管理系统中,进行三维模型与施工现场图像的叠加,并基于叠加效果评价模型,计算和分析配准效果。最后,利用分析结果修正投影模型,使BIM模型在平面中的投影与施工图像中的建筑物完全重叠。
3.1 叠加效果分析
为直观呈现叠加状态,突出显示BIM模型构件并保留施工图像细节,本节将分析影响叠加效果的几个因素,探索BIM平面野和施工现场图像的最佳叠加状态。
在Navisworks中通过调节光源和渲染模式可以改变BIM模型的显示状态,如图8所示,分别为完全渲染模式、全光源完全渲染模式、着色模式、线框模式和隐藏线模式。
将不同渲染模式下BIM平面野与施工现场图像叠加,并调节BIM模型的透明度,以观察不同渲染模式下的叠加效果,如图9所示。可以看出完全渲染模式下施工现场与BIM平面野未形成明显对比;在全光源完全渲染模式下和着色模式下,2个图像对比效果明显,而且通过设定BIM模型为亮绿色时,BIM模型辨识度高,可同时分辨施工现场和BIM模型;在线框模式下和隐藏线模式下,对比不够强烈,辨识困难。
BIM模型构件的选择性显示对叠加效果的影响因素明显。如图10所示,当BIM模型构件全部高亮显示时,虽然能分辨BIM模型和实际施工现场,但无法区分单个构件,没有实现对比效果;当BIM模型待观察构件高亮显示时,构件对比明显;当BIM模型待观察构件高亮显示且隐藏其他构件时,构件对比明显且不影响其他区域的施工现场的显示。因此,在叠加前要调整BIM模型在Navisworks中的显示状态,否则无法达到预期效果。
图像的透明度是影响叠加效果的重要因素,且不同叠加方式下叠加效果不同。如图11所示,上方一组叠加结果中,BIM平面野置于底层,施工现场图像置于顶层且透明度由低到高;下方一组叠加结果中,施工现场图像置于底层,BIM平面野置于顶层且透明度由低到高。透明度分别为20%,35%,50%,65%和80%。当施工现场图像叠加于BIM平面野上方时,施工图像的透明度越低,其细节展示越明显,但BIM模型不突出;当BIM平面野叠加于施工现场图像上方时,BIM模型平面透明度越低,对施工现场图像的遮挡越严重;当透明度适宜时,2种方式均能展示施工现场的细节,并突出显示待观察的BIM模型构件。

图8 渲染模式((a)完全渲染模式;(b)全光源完全渲染模式;(c)着色模式;(d)线框模式;(e)隐藏线模式)

图9 不同渲染模式下叠加效果((a)完全渲染模式;(b)全光源完全渲染模式;(c)着色模式;(d)线框模式;(e)隐藏线模式)

图10 不同选择性显示下叠加效果((a)全都高亮显示;(b)仅高亮显示待观察构件;(c)高亮显示待观察构件并隐藏其他构件)

图11 不同叠加方式和透明度下叠加效果((a) 20% 现场图像;(b) 35%现场图像;(c) 50%现场图像;(d) 65%现场图像;(e) 80%现场图像;(f) 20% BIM平面野;(g) 35% BIM平面野;(h) 50% BIM平面野;(i) 65% BIM平面野;(j) 80% BIM平面野)
综上,适宜的叠加方式应在着色模式下,高亮显示待观察BIM模型构件。当BIM平面野置于底层时,将施工现场图像透明度调节至35%~50%之间;当施工现场图像置于底层时,将BIM平面野透明度调节至50%~65%之间。本文默认设定BIM平面野置于上方且透明度为65%。
3.2 配准偏差分析
选定渲染模式后,设置Navisworks视点参数,见表1。将BIM平面野与施工现场图像叠加,并通过叠加效果评价模型计算偏差,见表2。根据偏差计算结果修正Navisworks视点参数,并重新叠加,修正后叠加结果如图12所示。
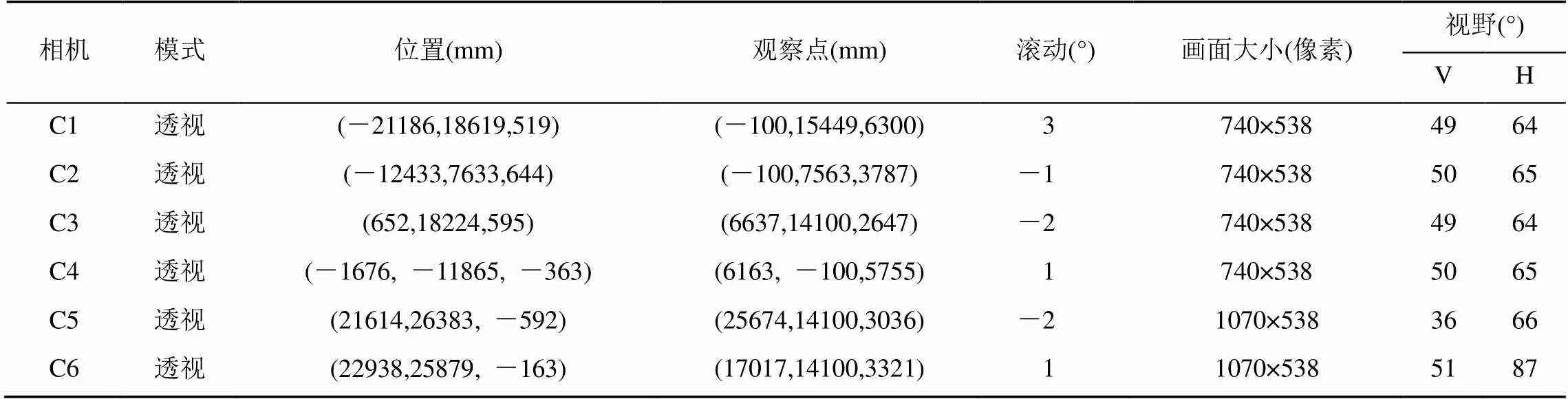
表1 Naviworks相机视点参数设置
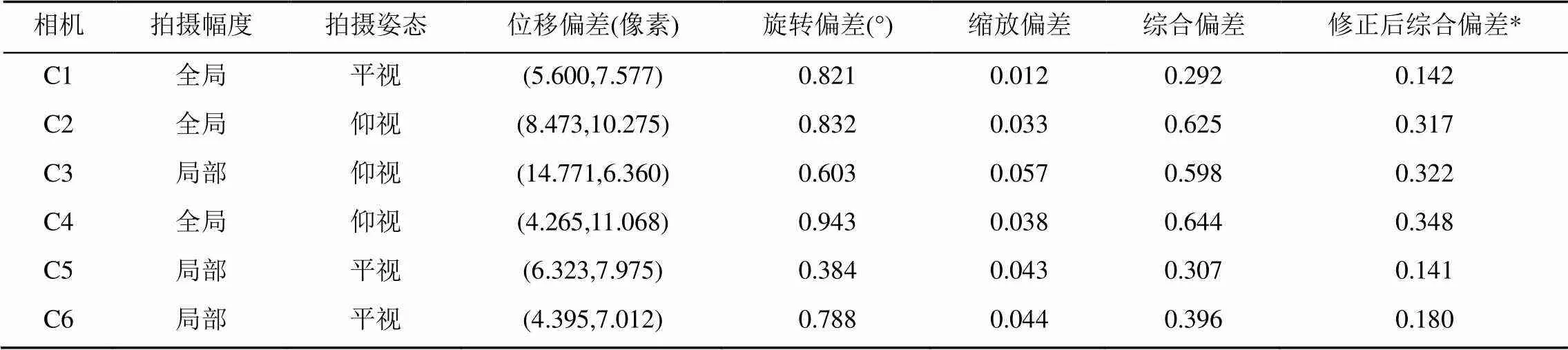
表2 实验结果
注:*为专家综合判断得出,可接受的修正后综合偏差为0.374
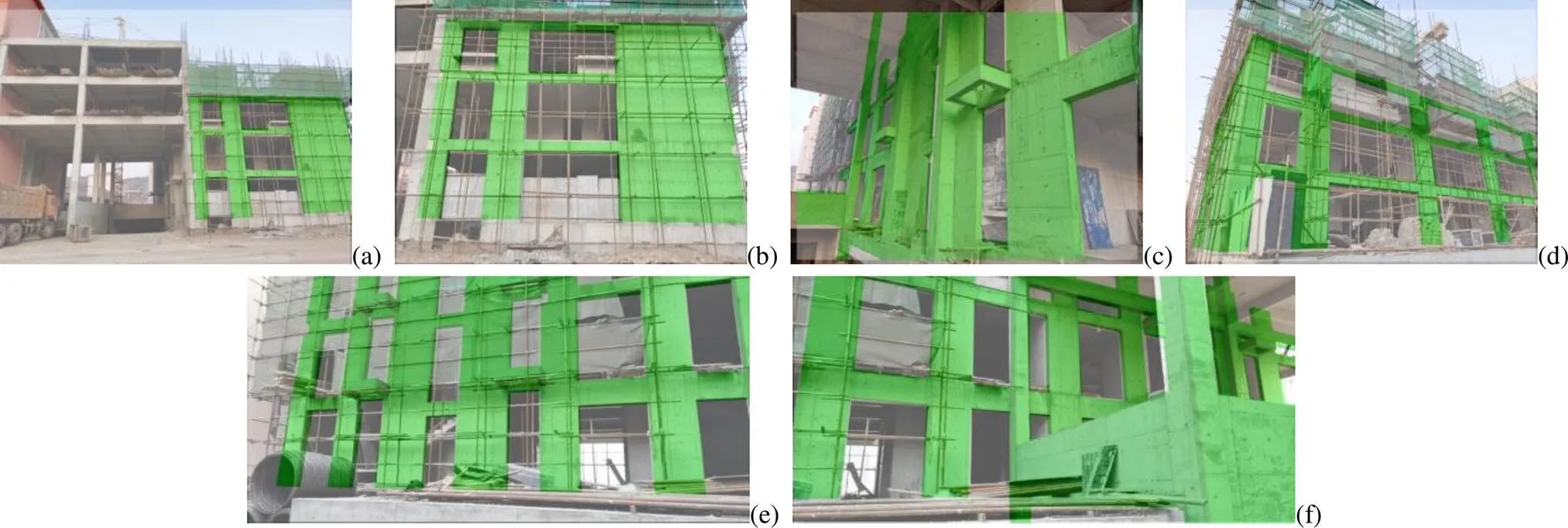
图12 修正后叠加效果((a) C1相机;(b) C2相机;(c) C3相机;(d) C4相机;(e) C5相机;(f) C6相机)
由表2可以看出,当拍摄姿态为平视时,配准效果明显优于仰视时的配准效果,综合偏差在0.290~0.400之间,修正后的综合偏差降至0.200以下;相对于全局拍摄的图像,局部图像配准效果略好。为度量综合偏差大小,经过多次叠加对比,并由专家综合判断得出,可接受的修正后综合偏差为0.374。本研究中所有相机的叠加结果满足可接受误差,符合预期效果。
4 结束语
本文探索了建筑结构施工阶段施工图像与BIM模型配准叠加方法,其创新性主要体现在:①通过对投影模型和相机标定方法的分析,构建了施工图像与BIM模型之间的映射关系;②通过对Navisworks的二次开发实现了BIM平面野与施工现场图像的叠加;③通过叠加效果评价模型的构建,实现了对配准偏差的分析和对映射模型的纠正。
本文以某商住楼施工现场为例,进行了实证分析,分析结果表明:①叠加效果最好的方式为在着色模式下,高亮显示待观察BIM模型构件,并将上层图像透明度设置为35%~65%之间;②当拍摄姿态为平视时,配准效果明显优于仰视时的配准效果,修正后的综合偏差可降至0.200以下;③所有相机的叠加效果偏差都在可接受误差内。因此,本文提出的配准叠加方法能够有效地实现施工图像与BIM模型的配准,直观地反映建筑结构施工阶段计划模型与实际施工状态之间的偏差,提高工程管理的效率与水平。
[1] 丁浩, 廖峻. 基于BIM技术的隧道工程信息平台设计与研究[J]. 隧道建设(中英文), 2019, 39(S2): 60-68. DING H, LIAO J. Design and research of tunnel engineering information platform based on BIM technology[J]. Tunnel Construction (Chinese and English), 2019, 39(S2): 60-68.
[2] 翟晓卉, 史健勇. BIM和GIS的空间语义数据集成方法及应用研究[J]. 图学学报, 2020, 41(1): 148-157. ZHAI X H, SHI J Y. Research on spatial semantic data integration method and application of BIM and GIS[J]. Journal of Graphics, 2020, 41(1): 148-157 (in Chinese).
[3] 刘一鸣, 金必煌, 刘沐洁. 基于BIM仿真模型的施工过程模拟研究——以科技图书馆建筑施工为例[J]. 浙江水利水电学院学报, 2020, 32(1): 58-62. LIU Y M, JIN B H, LIU M J. Research on construction process simulation based on BIM simulation model – taking the building construction of science and technology library as an example[J]. Journal of Zhejiang Institute of Water Resources and Hydropower, 2020, 32(1): 58-62 (in Chinese).
[4] 章伟, 蒲建明, 郑海. 大跨度钢结构虚拟仿真现场安装施工技术综述[J]. 建筑结构, 2019, 49(S1): 343-345. ZHANG W, PU J M, ZHENG H. Review of installation and construction technology for virtual simulation of long-span steel structure[J]. Building Structure, 2019, 49(S1): 343-345 (in Chinese).
[5] 张剑涛, 姚爱军. 基于BIM技术的PBA法施工虚拟仿真[J]. 地下空间与工程学报, 2015, 11(S2): 674-679. ZHANG J T, YAO A J. Virtual simulation of PBA method based on BIM technology[J]. Journal of Underground Space and Engineering, 2015, 11(S2): 674-679 (in Chinese).
[6] 周桂香, 蒋凤昌, 李永奎, 等. 上海市胸科医院科教综合楼施工阶段的BIM应用[J]. 工业建筑, 2018, 48(2): 47-52. ZHOU G X, JIANG F C, LI Y K, et al. BIM application in the construction stage of science and education complex building of Shanghai Chest Hospital[J]. Industrial Building, 2018, 48(2): 47-52 (in Chinese).
[7] 唐红, 孔政, 龙腾. 建筑信息建模技术在武汉某超大型深基坑工程中的应用[J]. 工业建筑, 2016, 46(11): 197-200, 174. TANGH, KONG Z, LONG T. Application of building information modeling technology in a very large deep foundation pit project in Wuhan[J]. Industrial Building, 2016, 46(11): 197-200, 174 (in Chinese).
[8] DENG H, HONG H, LUO D, et al. Automatic indoor construction process monitoring for tiles based on BIM and computer vision[J]. Journal of Construction Engineering and Management, 2020, 146(1): 04019095.
[9] LI Y X, LI W B, TANG S J, et al. Automatic indoor as-built building information models generation by using low-cost RGB-D sensors[J]. Sensors (Basel), 2020, 20(1): 293.
[10] GOLPARVAR-FARD M, PENAMORA F, ARBOLEDA C A, et al. Visualization of construction progress monitoring with 4D simulation model overlaid on time-lapsed photographs[J]. Journal of Computing in Civil Engineering, 2009, 23(6): 391-404.
[11] PERCOCO G, GUERRA M G, SANCHEZ SALMERON A J, et al. Experimental investigation on camera calibration for 3D photogrammetric scanning of micro-features for micrometric resolution[J]. The International Journal of Advanced Manufacturing Technology, 2017, 91(9-12): 2935-2947.
[12] ZHANG Z Y. Flexible camera calibration by viewing a plane from unknown orientations[C]//The 7th IEEE International Conference on Computer Vision. New York: IEEE Press, 1999: 666-673.
Projection-based registration overlay method of construction image and BIM model
HOU Xue-liang1, XUE Jing-guo1, WANG Yi1, ZENG Ying2
(1. School of Economics and Management, North China Electric Power University, Beijing 102206, China; 2. State Grid Mianyang Power Supply Company, Mianyang Sichuan 621000, China)
In order to visually compare the deviation between the actual construction progress and the planned progress during the construction of the building structure by combining the planned building information modeling (BIM) construction process simulation with the progress at the construction site, a projection model-based registration overlay method of construction images and the BIM model was proposed. Firstly, based on the analysis of the camera projection model and the camera calibration method, the coordinate mapping relationship between the construction site image and the camera imaging plane was established. Secondly, the Navisworks application programming Interface was employed to develop the construction image overlay management system, which realized the superposition of the construction image and the BIM model plane field. Then, an evaluation model for judging the registration effect was proposed based on the deformation characteristics between the superimposed image groups. Finally, an empirical analysis was carried out by taking the construction site of a commercial and residential building as an example. The experimental results show that the best way of superimposing is to highlight the to-be-observed BIM components in shading mode, and to set the transparency of the upper image between 35% and 65%; in the case of eyelevel shot, the registration effect is significantly better than that of low-angle shot; the deviation of the superimposed effect of all cameras is within the acceptable error. The proposed method can effectively achieve the registration of the construction image and the BIM model, and visually reflect the deviation between the planned model and the actual construction progress during the construction of the building structure.
building information modeling; construction process simulation; construction images; camera calibration; image registration overlay
TU 17;T 391.9
10.11996/JG.j.2095-302X.2021010141
A
2095-302X(2021)01-0141-09
2020-06-03;
3 June,2020;
2020-09-11
11 September,2020
国家自然科学基金项目(71171081);北京市自然科学基金项目(9162014)
:National Natural Science Foundation of China (71171081); Natural Science Foundation of Beijing Municipality (9162014)
侯学良(1966-),男,山西太原人,教授,博士。主要研究方向为工程信息管理。E-mail:houxueliang@ncepu.edu.cn
HOU Xue-liang (1966-), male, professor, Ph.D. His main research interest covers construction information management. E-mail:houxueliang@ncepu.edu.com