智能网联先导区道路交叉口车路协同系统设计
2021-04-09董金玮苑寿同胡鑫
董金玮 苑寿同 胡鑫
摘 要:近年来,车路协同是汽车与交通行业发展的重要方向之一,而车路协同环境建设和推广也成为先导区建设的重中之重。车路协同系统利用无线通信、传感器检测、高精度地图定位、人工智能、计算机等众多技术来获取车辆和道路信息,在实现人、车、路充分协同的同时,从而达到主动提高道路交通安全、最优化利用系统资源、缓解交通拥挤的目标,形成安全、效率、环保的道路交通系统。先导区一般选址在车流量大、道路环境复杂、附近居住人口密集的区域。先导区内汽车智能与网联化测试、V2X场景实现均需要借助于车路协同系统环境。本文介绍了先导区道路交叉口车路协同系统涵盖的技术,以及实现的功能和信息服务场景,并从车端、路端给出了相应场景的解决方案。
关键词:先导区 车路协同 道路交叉口 无线通信
Design of Vehicle Road Coordination System for Intelligent Network Leading Area Road Intersection
Dong Jinwei Yuan Shoutong Hu Xin
Abstract:In recent years, vehicle-road coordination has been one of the important directions for the development of the automobile and transportation industries, and the construction and promotion of the vehicle-road coordination environment has also become the top priority in the construction of the pilot zone. The vehicle-road collaboration system uses wireless communication, sensor detection, high-precision map positioning, artificial intelligence, computers, and many other technologies to obtain vehicle and road information. While achieving full collaboration between people, vehicles, and roads, it can actively improve road traffic safety. The goal is to optimize the use of system resources and alleviating traffic congestion to form a safe, efficient, and environmentally friendly road traffic system. The pilot area is generally located in an area with a large traffic volume, a complex road environment, and a densely populated area nearby. In the pilot area, vehicle intelligence and networked testing, and the realization of V2X scenarios all require the aid of a vehicle-road collaborative system environment. This article introduces the technologies covered by the vehicle-road collaboration system at road intersections in the pilot zone, as well as the realized functions and information service scenarios, and provides solutions for the corresponding scenarios from the vehicle and the road.
Key words:demonstration area, cooperative vehicle infrastructure, road intersection, wireless communication
1 前言
隨着新一代无线通信技术、高精尖制造技术、人工智能技术的发展,我国车路协同技术产业进入快车道,技术创新日益活跃,新兴行业与技术的发展,产业规模不断扩大,但也存在相关核心技术有待提高、产业生态尚需完善以及政策法规亟待完善等问题。一是技术核心产品还未完全达到落地水平,车路协同核心产品如车载设备芯片、车载终端、路侧基础通信设备等在我国虽已获得巨大进展,但产品本身离商业化的部署还有较大的距离。二是车路协同商业运作模式尚不清晰,拓扑网络部署方案不明确,还由于车路协同涉及的产业链较长,上下游相关的不同行业厂商众多,目前尚未形成强有力的行业主导方,整体未有统一的网络部署方案,缺乏核心凝聚力与竞争力,产业推动力量发散。
为解决上面的问题,国家和地方政府均大力推广建设智能网联汽车先导区,开展规模化试应用,推动核心技术研发迭代、车路协同与其他行业的协作融合,探索车路协同产业成长和商用部署途径,加速我国车路协同产业规模化应用:
一需标准化车路协同应用基础环境建设[1]。由于场景实现需进行车-车、车-路、车-云等不同主体的信息交互,但目前面临多源主体间信息交互格式标准不统一以及信息孤岛问题,仍需探索标准化的车联网应用环境建设模式;
二是V2X应用场景有待补充丰富。目前车路协同系统场景覆盖范围有限,经济效益和社会效益的转化并不明显,需要发掘车路协同在出行以及交通运输领域的应用场景,发挥车路协同在智慧城市建设中的作用。
三是车路协同行业服务质量有待提高。目前主机厂均已制定车路协同相关产品的量产计划,仍需开展行业服务能力建设助力车路协同新产品开发、落地应用。
四是车路协同商业模式缺失。车路协同产业推进发展需要大量RSU、高精度定位基站与高精度地图采集和数据服务器的投入。因此如何找到合理的商业模式,推动车路协同应用发展,使得产业链参与方得到一定的利润回报,是当前车路协同产业发展急需解决的问题,也是促进產业进一步发展的保障。
国内外对车路协同系统及其技术的相关研究已有多年,2015年底,日本开始着力推行 ETC2.0。2017年2月,新加坡LTA组织宣布MHI和NCS公司联合体中标ERP2.0,基于V2X技术,2021年正式实施。2018年12月,美国交通部发布标准要求,要求新上市轻型车辆安装车路协同设备。各国大力推动车路协同系统的发展目的都在于解决汽车的安全、能效和环境保护等问题。
我国的车路协同行业技术研究相对国外起步较晚,为抢占市场先机,近几年国内也积极开展智能网联汽车测试示范区的建设工作。目前各地测试环境建设已初具成效,各地充分利用地形、气候差异,实现测试环境建设的差异化发展[2]。但在推进测试示范区建设中,提供大规模实际应用与切实为行业服务等方面的环境建设仍存在不足,需要以先导区为建设为契机,全面发展车路协同产业生态链。
2 先导区车路协同系统功能分析
对基于先导区交叉口车路协同系统功能需求分析,得知该系统基本实现6类功能:V2X综合管理、路口车辆环境感知、路口智能设备运维、特殊车辆优先通行、路口预警与提醒、信息数据网络服务。
V2X综合管理:V2X 综合管理可以接入RSU和车载终端(车载后视镜、OBU),手机APP和车载端数据,为用户提供V2X基础数据服务,支撑车载终端/手机APP上的V2X应用。
路口车辆环境感知:对道路运行的车辆进行实时监测, 同时对车道线以外行驶的其他车辆、路边行人以及周边的静止物体等进行信息采集,对车道线内行驶的车辆位置、速度和交通流信息进行分析统计,对于恶劣天气条件下道路的路况信息进行管控。
路口智能设备运维:智能终端设备管理平台建设主要围绕设备的实时监测进行智能监管,这能更全面地管理先导区内的路侧设备。设备管理平台需汇集所有路侧设备的状态数据,对接口数据进行脱敏、封装、存储处理[3]。
特殊车辆优先通行:当有特勤车辆如消防车、救护车、警车或其他紧急呼叫车辆等需要优先通行时,能够通过车载OBU向道路其他车辆进行广播,同时附近路侧RSU能够实时获取其行驶位置,通过车路协同系统控制车辆行驶路线上的信控路口配时,优先通行该车辆。
路口预警与提醒:前向碰撞预警、交叉路口碰撞告警、逆向行驶预警、车辆失控预警、闯红灯预警、静止车辆预警、左转辅助预警等。
信息数据网络服务:以路侧端和车端的多传感器、摄像头毫米波雷达等设备的数据为数据源,提供动态感知、融合定位等技术以及全面覆盖、泛在互联、智能应用等信息服务。
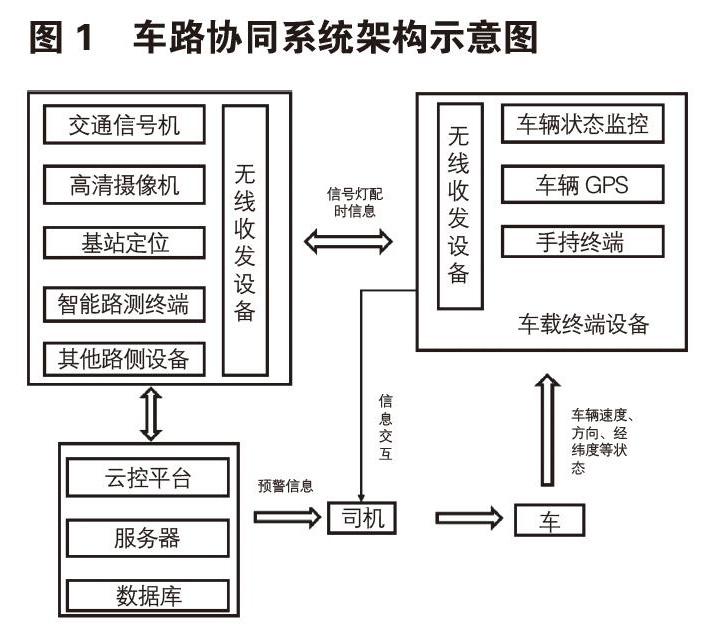
3 车路协同系统架构
车路协同系统架构主要分为四层:设备层、网络层、平台层、应用服务层。
设备层包括路侧设备和车载设备两部分内容,路侧设备包括路侧感知设备、路侧通信设备RSU、边缘计算设备MEC等,车载设备主要为车载OBU设备。
网络层主要提供通信网络服务,包括5G等移动通信网络、固网通信、PC5直连通信。
平台层包括车路协同云控平台,通过设备的统一接入管控,提供互联互通、融合感知、决策控制、数据分析、运营管理等车联网服务。云数据中心为上层各类应用提供计算、存储、网络、安全服务。
应用服务层主要包含V2X车联网应用、自动驾驶应用、自动接泊应用。
此外,系统还将与出行服务平台、地图、交通、气象系统等业务系统对接,实现数据与服务的互联互通。
系统还将构建安全保障体系、标准规范体系、运维管理体系,通过管理、标准,制度等规范手段保障各系统正常运行。
4 车路协同系统关键技术
4.1 无线通信技术
V2X车路协同通信技术主要包括三种形式,分别为车辆与车辆通信(Vehicle to Vehicle,简称V2V)、车辆与基础设施通信(Vehicle to Infrastructure,简称V2I)以及车辆与行人通信(Vehicle to Pedestrian,简 称V2P),通过人、车、道路设施相互之间的信息交互,实现在复杂交通环境中智能决策、感知融合、协同控制等功能。协同的前提是交通要素间快速、准确的信息交换,因此一个超可靠低时延的车路间通信系统是车路协同的基础。同样,道路基础设施的信息(如信号灯状态、电子标牌、地图)、路侧感知的交通参与者信息、交通事件(如拥堵、遗洒、施工)、交通管理部门的管控指令(如限速、禁行、交通管制)也要通过车路通信网络传输到车侧,供车辆的驾驶行为决策使用。
V2X无线通信技术是将车辆与一切事物建立连接的新一代信息通信技术。它可以保障100ms以内的传输时延,不依赖基站的区域覆盖从而进行直连通信,提供高效的广播机制,是一种非常适合车、路间通信的技术。在V2X通信技术的支持下,车辆可以迅速获得周边车辆和道路的状态信息,从而支持车辆行驶路径的动态规划,达到避免碰撞、快速通行的目的,实现交通局部的协同。云控中心则可以实时获得全时空动态交通信息,进而支持交通的全局管控。目前, 国际上主流的V2X技术有电气和电子工程协会标准(IEEE 802.11p)和蜂窝车用无线通信(C-V2X)2 条技术路线[5]。与IEEE802.11p 相比,C-V2X 有2 方面的优势 :用户间干扰小,支持并发用户数更多,有效通信距离大,可以给驾驶员提供更长的刹车反应时间。 V2X车路协同系统充分实现了人、车、路的有效协同,提高驾驶安全性,减少城市交通拥堵、从而提高城市交通管理效率,同时为自动驾驶领域起到“保驾护航”的作用。
4.2 智能感知技术
除了可以继续利用图像处理技术进行交通事件识别,利用气象传感技术进行气象事件识别,利用线圈、雷达技术进行交通流量统计外,还可以利用激光雷达、雷视一体机等先进的感知手段进行交通参与者的目标识别与跟踪。
在V2X技术的支持下,公共车辆(如公交车、出租车、交警车辆、道路养护车辆)上可加装感知设备,对交通状态信息进行采集,并通过V2X技术实时汇聚到路侧,与路侧直接感知到的信息进行融合。随着多种感知设备的使用,不同设备感知结果之间的同步和去重成为新的研究课题。
4.3 边缘云控技术
车路协同的目标是实现局部交通的快速协同和全局交通的综合管控,这就要求部分信息在本地快速处理,并快速通知到周边车辆,也就是边缘云控;部分信息要汇聚到云控中心进行全局数据分析和全局的交通流管控,也就是中心云控。边缘云控利用移动边缘计算(MEC)技术将计算、决策能力向网络边缘进行迁移,实现局部交通协同的分布式、本地化部署,进而可以通过V2X技术为区域内行驶的车辆提供低时延车路协同服务。采用 MEC 技术,可以将敏感数据或隐私信息控制在区域内部,同时降低回传网络的负载压力。
4.4 多传感器信息融合技术
多传感器信息融合是利用信息处理技术将来自多个传感器的监测信息进行分析、综合处理, 从而得出辅助决策和估计任务所需信息的处理过程。多传感器信息融合的基本原理是:通过对各种传感器及人工观测信息的合理支配与使用,将各种传感器的信息在空间和时间上进行互补与冗余,进而产生某种优化准则而对观测对象的客观描述。
5 车路协同系统架构及设备组成
5.1 车路协同系统硬件结构
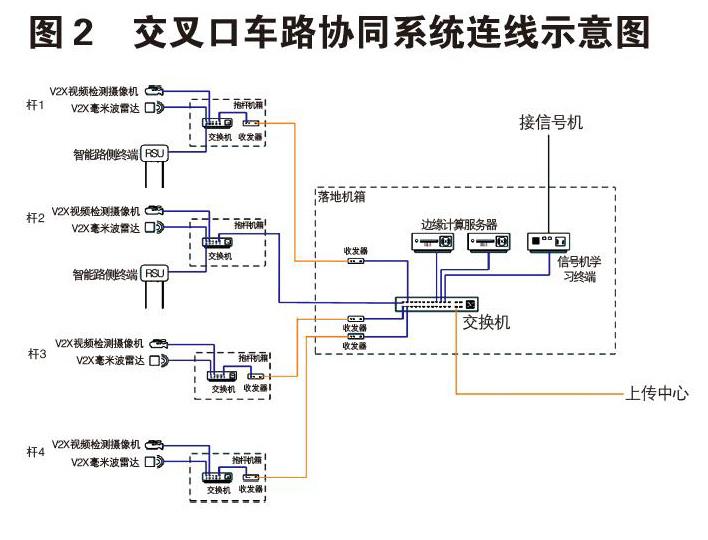
智能网联先导区交叉路口车路协同硬件系统由车载端设备、路侧设备、云控平台、5G基站等组成。路侧设备主要包含:智能路测单元RSU、毫米波雷達、激光雷达、高清摄像机、边缘计算节点MEC等,车载端设备主要由智能车载终端OBU组成、用于获取车辆位置、状态以及驾驶路径信息;
系统硬件连接示意图示例如图2所示。
5.2 硬件设备组成
车载端设备:OBU(On Board Unit),是一种安装在车辆上的可实现V2X通信,支持V2X应用的硬件单元,是车载终端的核心单元。OBU的部署是实现V2X产业化落地应用的前提与关键环节。OBU支持数据的接收,包括通过PC5接收RSU广播的数据。
车载智能终端搭载 GPS 的定位模块、信号发射天线、接收天线、加速度和陀螺仪等传感器模块,可充分获取车辆运动状态信息。作为车载设备,可以通过导航 APP 实现对车辆的位置识别、速度引导、地图导航和交通状况查询。GPS 定位模块主要用于车辆运行位置、行车时间、行驶速度等数据的采集。
路侧端设备:RSU(Road Side Unit),RSU的基本功能包括业务、管理和安全三类,其中业务能力围绕V2X业务的实现,汇集路侧交通设施和道路交通参与者的信息,并将V2X消息广播给道路交通参与者;管理功能负责完成设备的认证、管理与维护;安全功能负责实现RSU设备自身,以及RSU与其他交互对象之间信息交互的安全保护。毫米波雷达主要应用于先导区路口路况监测,可探测前方200米道路上违章停车、超速、违规并线、应急车道行驶等事件,获取当前监视场景中各个车辆的位置并跟踪所有车辆行驶轨迹,同时支持车速、车流量、车道占有率、平均车速等信息,并实时获悉路况信息,从而判别出交通道路拥堵、异常等事件等。高清摄像机架设在路口或路段上,实现对路口停靠区域的行人、非机动车等闯入目标进行检测,并发送给边缘计算节点MEC服务器,提取视频中的交通目标,包括行人、非机动车、机动车,并将处理之后的结构化数据反馈至智能路侧设备。激光雷达为道路大量运动物体,包括车辆、行人、自行车、摩托车等,提供高精度的速度、位置、方向等,以及运动状态、姿态、形状等信息,相比于毫米波雷达与传感器,激光雷达的辐射范围、覆盖角度更广、测距更准确。
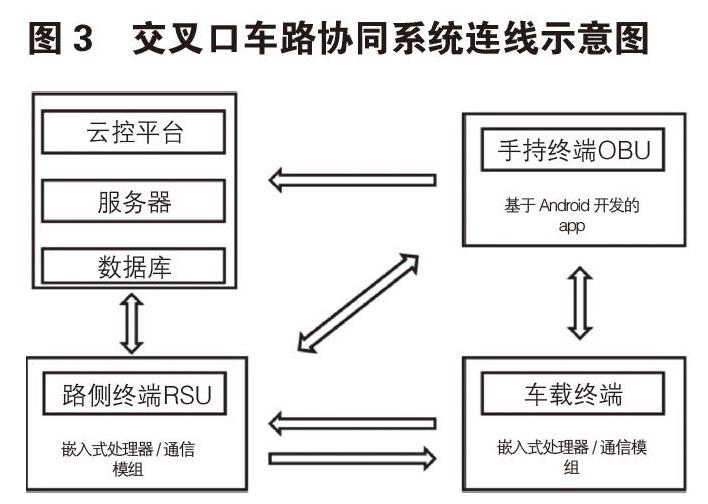
5.3 软件系统框架及组成
车路协同软件系统框架由云控平台、手持终端软件组成,其系统连接图如图3所示:
云控平台:云控平台作为车联网业务的基础能力平台,旨在为业务及上层应用提供数据高接入、融合分析、高精度定位、边缘计算、业务连续性保障等基础能力,以满足车路协同、自动驾驶的业务需求。它为道路建设及汽车配置提供基础设施、车辆运行、交通管理等动态基础数据,具有数据存储、数据运维、大数据分析并支持智能网联汽车实际应用需求的支撑平台。
平台展示内容包括路侧网联设备信息显示、信号灯信息显示、网联汽车个体信息展示等。同时主视图界面会包含网联信息查看和处理功能,信号灯信息显示可显示该信号灯的ID,以及所有相应的实时状态信息,包括红绿灯色,倒计时秒数、控制模式等。
手持终端软件:是对智能网联车辆或自动驾驶车辆进行管理,可以在线查看车辆信息,同时可以在线实时查看该车在地图层的实时位置。手持终端可对路侧端设备进行监控,支持对路侧监控进行管理,路侧监控模型展示、显示设备总数和异常设备数量,可展示V2X通信过程,如车车通讯(V2V),接收到车辆之间的交互信号时的交互效果,车路通讯(V2I),接受车辆与路侧设备的交互信号时展示车辆与路侧设备之间的交互效果等。
6 V2X场景验证
V2X应用场景验证以中国天津(西青)国家级先导区域内的路端作为测试场地,如图4所示,选定张家窝镇家合里周边8个道路交叉口布置车路协同系统设备。
测试过程中,选取先导区内不同复杂道路交通场景路口,如丁字路口、十字路口、Y型路口等,同时在不同类型车上搭载车载终端进行测试,具体测试方法与结果如下:
1)基于信号灯的车速引导。任选一个配置OBU的自动驾驶汽车,当车辆A距离十字路口100-200m左右时,路侧端RSU接收到来自OBU发送的信息,RSU给周边配置OBU的车辆广播信号灯配时、路口行人移动状态、道路拥堵状况等信息,车辆A车载终端OBU根据红绿灯配时、路口行人状态选择减速,加速通过路口,保障路口不拥塞。测试结果表明:系统能够有效的引导车辆通行交叉口。
2)闯红灯预警。车辆在经过有信号灯控制的交叉口时,存在不按信号灯规定或指示行时,车路协同系统对装有OBU车辆的驾驶员进行预警。闯红灯预警同时适用于城市及郊区道路及公路的交叉路口、环道的出入口和可控车道、高速路入口和隧道等有信号控制的车道。测试结果表明:车路协同系统能准确识别到闯红灯的异常车辆。
3)特殊车辆优先通行。特殊车辆调度是指智能交通系统调度交通资源针对特殊车辆采取提前预留车道、封闭道路或切换信号灯等方式,为特殊车辆提供安全高效到达目的地的绿色通道。特殊车辆包括警车、消防车、救护车、工程抢险车、事故勘查车等。本实验选取警车、救护车来模拟特殊车辆。
4)盲区预警/变道预警,指当主车的相邻车道上有同向行驶的远车出现在主车盲區时,主车没有变道意图,车路协同系统应用对主车驾驶员进行提醒。变道预警则是当主车准备实施变道操作时(例如激活转向灯等),若此时相邻车道上有同向行驶的远车处于或即将进入主车盲区,车路协同系统同应用对主车驾驶员进行预警。测试结果表明:智能网联车路协同系统能准确的对盲区进行预警,以及在变道前预警。
7 结束语
本文探讨了智能网联先导区车路协同系统的设计应用场景,分析了交叉口车路协同系统功能实现的场景测试方案。给出了道路交叉口车路协同系统硬件配置方案、设备连接示意图等。并在西青先导区域内验证了所设计方案的合理性与可行性,经验证,系统可感知路况实时信息,获取车辆的速度、方位等行驶状况信息。车辆与车辆之间、车辆与路端设备之间可实现信息的即时处理,这为驾驶员道路行驶提供相关辅助支持。同时也优化了系统资源,缓解交通拥堵,提高道路交通安全和效率,为之后先导区车路协同环境改造及设备部署提供参考。
参考文献:
[1]陈漩,蔡子华.面向下一代车联网的V2X关键技术研究[J].广东通信技术,2018,038(4):22-25.
[2]程璐明.基于5G万物互联的智慧交通探索 [J].智能城市,2019,5(4):98-99.
[3]陈红,胡恩才,白静静.交叉路口信号灯智能管理系统设计[J].机械与电子,2019(11).
[4]常振廷,谢振东,董志国.智能网联车路协同城市大脑建设框架研究[J].智能网联汽车,2020(2):88-95.
[5]中国汽车工程学会.合作式智能运输系统车用通信系统应用层及应用层数据交互标准:T/CSAE 53-2017[S].2017.
