纯电动汽车自动驾驶功能设计
2021-04-09李小润钟日敏黄祖朋赵小羽沈阳
李小润 钟日敏 黄祖朋 赵小羽 沈阳
摘 要:针对纯电动车自动驾驶功能,设计一种利用PID算法对车辆的驱动扭矩进行控制的系统,使得车辆的实际速度与驾驶员的期望速度一致,实现车辆自动驾驶的功能。通过实车验证和调试,该控制系统具有良好的响应精度。相较于传统汽车通过控制喷油量的多少来控制车速,具有更好的鲁棒性和实时性。
关键词:纯电动车 自动驾驶 PID控制
1 引言
在节能减排的法规日益严格及智能驾驶不断兴起的背景下,全球汽车行业关于纯电动车的关注和投入火速增加。美国学者麦肯锡预测,到2025年无人驾驶汽车可以产生2000亿~1.9万亿美元的产值;市场研究公司IHS预测, 2035年4级完全无人驾驶车每年销量可达480万辆。对任何一个行业而言,这都具有足够的市场诱惑。[1]当前各主机厂都投入了大量的人才及资源进行开发。
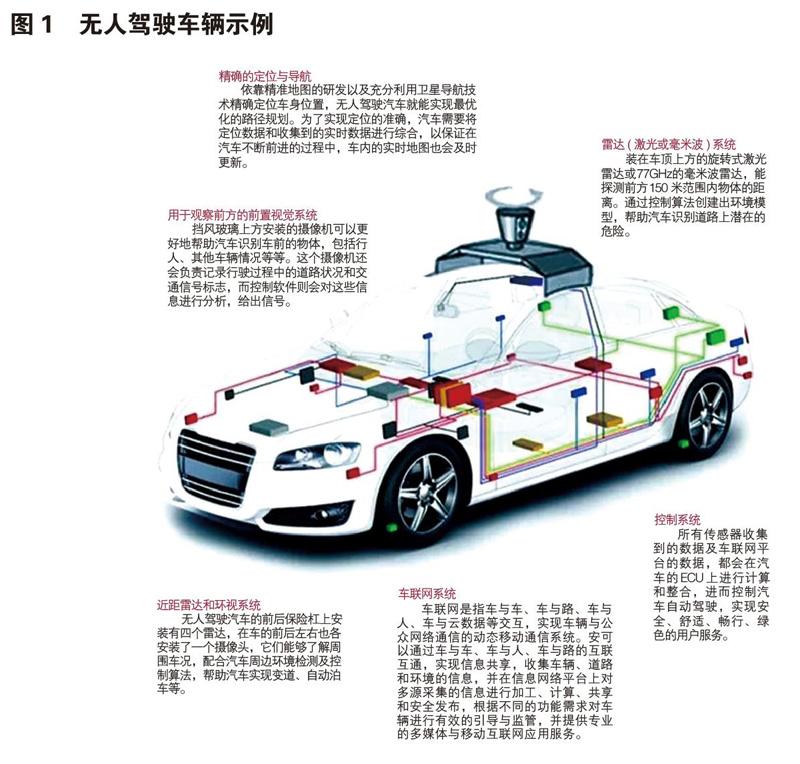
无人驾驶,是指通过给车辆装备智能软件和多种感应设备,包括车载传感器、雷达、GPS以及摄像头等,实现车辆的自主安全驾驶,安全高效地到达目的地并达到完全消除交通事故的目标。[2]无人驾驶的一大核心功能是实现汽车自动驾驶功能,能实现脱离油门踏板,以驾驶员通过上位机发出的任何期望速度行驶。并使得驾驶员能脱离转向系统、制动系统、换挡装置和油门踏板等,自动实现车辆的起步、换挡、加减速、停车等功能。如图1。
鉴于传统车在实现自动驾驶的PID模块中,通过控制喷油量来调节车速,固然有一定的可靠性。然而出现不同工况或路况时,相同的喷油量输出的扭矩也必然不一样。会使得控制器缺乏精准的鲁棒性和实时性。文章对于纯电动车,设计一种自动驾驶控制系统,直接输出对电机的扭矩请求值驱动车辆,具有更好的响应精度。
2 自动驾驶功能结构模块设计
自动驾驶功能控制系统的硬件模块主要包括:1、整车控制器(Vehicle Control Unit,简称VCU);2、电机控制器(Motor Control Unit,简称MCU);3、驱动控制器(Drive Control Unit,简称DCU);4、车速传感器;5、驱动电机。
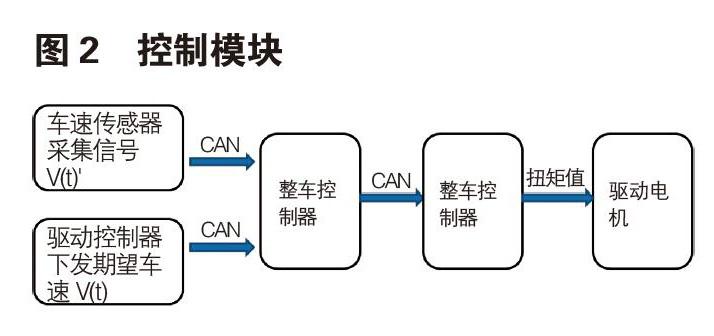
由车速传感器采集当前的车速信号,DCU通过道路的实时工况,对整车提出相应的期望车速信号,两者通过整车的CAN(Controller Area Network)总线传输给VCU。VCU采集二者信号后,通过内部的PID算法,转化为对MCU相应的扭矩输出请求。MCU控制电机输出期望的扭矩值,使得车辆能实时地以DCU发出的期望车速行驶,达到自动驾驶的目的。控制模块如图2所示。
3 PID控制模块设计
3.1 PID简介
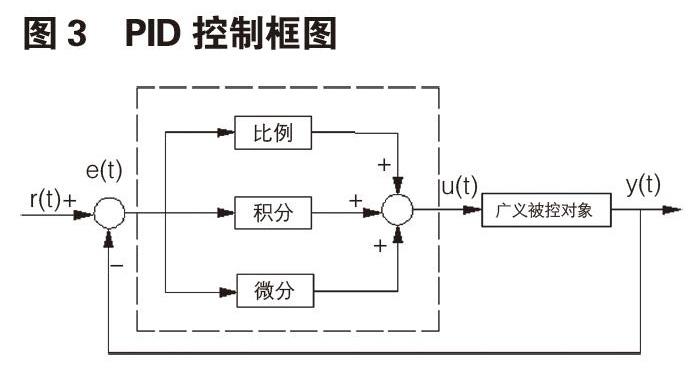
在工程实际中,应用最为广泛的调节器控制规律为比例、积分、微分控制,简称PID控制,又称PID调节。PID控制器问世至今已有近70年历史,它以其结构简单、稳定性好、工作可靠、调整方便而成为工业控制的主要技术之一。当被控对象的结构和参数不能完全掌握,或得不到精确的数学模型时,控制理论的其它技术难以采用时,系统控制器的结构和参数必须依靠经验和现场调试来确定,这时应用PID控制技术最为方便。[3]
其控制框图如图3所示
其中,控制偏差e(t)=r(t)-y(t),比例、积分和微分的线性组合式为:
式中Kc为比例系数,T1为积分时间常数,Td为微分时间常数。理想PID控制器的传递函数为:
其中,
U(t):为输出信号;
e(t):为偏差信号;
Kp:为PID参数的比例系数;
Ti:为PID参数的时间积分常数;
TD:为PID参数的微分时间常数。
PID控制主要包括三大模块:
(1)比例P控制
比例控制是最早较为容易且普遍的工具,针对被控对象的输出与输入之间的差值为正比关系。即当偏差e(t)出现的时候,比例调节器通过运算控制,减小偏差的产生,使得系统稳定运行。比例控制在线性对象里占着绝大部分的比例。其中关键因素是比例系数Kp,一般而言,当Kp较大时,误差会更快地减小,但是此时会引起系统的振荡。当Kp较小时,则造成稳定调节需要很长的时间的情况。
(2)积分I控制
我们知道,比例控制难以避免稳态误差,这时,引进了积分算法。积分的作用是对累积的偏差调整,通过内部运算控制使得偏差慢慢趋近于零。当系统运行时,积分项随之变大,这时,即使误差比较小,积分项也会慢慢变大,依此使输出也慢慢变大,稳态误差慢慢减小,直至为零。
(3)微分D控制
微分控制的功能是敏感地感知误差变化的趋向,在偏差值要变得较大的时候,提前加入具有修正作用的调整信号,使得响应速度加快,减少调节的时间。因为系统中存在较大的滞后元件,使得变化滞后于误差的变化。所以此时若想提高控制精度,必须使用微分控制项以及早预防误差的出现。
3.2 自动驾驶控制策略
VCU采集当前车速V'(t),和驾驶员通过DCU控制器发出的期望速度V(t),内部通过PID算法的控制,输出对MCU的扭矩需求Tq。MCU通过需求的扭矩输出,电机驱动车辆以期望的速度行走。其控制框圖如图4所示。
经实车测试后,可得出控制系统对DCU期望车速的响应图,如图5
由图3可知,在城市路况低速调试中,实际车速达到期望车速的初始时段,误差超调量为±1.5km/h。达到稳态值后,实际车速与期望车速基本一致,稳态误差小于0.5km/h。因此,实际车速与驾驶员下发的期望车速有良好的跟随性,且加速性良好。
4 总结
以自动驾驶为主要功能的无人驾驶,在智能和环保的潮流下,如雨后春笋般涌现。与高速环境研究相比,城市环境下的无人驾驶由于速度较慢,因此更安全可靠,应用前景更好。短期内 ,可作为城市大容量公共交通 (如地铁等 )的一种补充,解决城市区域交通问题。在此背景下,提出在纯电动车中,以PID算法控制,由车速参数直接转化为对电机的扭矩控制,具有良好的鲁棒性和实时性。实车验证中表现出良好的响应精度,在无人驾驶市场领域具有很好的推广性。
基金项目:广西创新驱动发展专项资金资助项目(桂科AA18242039);柳州市科学研究与技术开发计划资助项目(2019AD10202)
参考文献:
[1]杨帆. 汽车的发展现状和展望[J]. 《上海汽车》,2014(3):35-40.
[2]孙健,全兴.无人驾驶汽车发展现状及建议[J].《科技视界》,2017(6).
[3]何芝强.PID控制器参数整定方法及其应用研究[D].杭州:浙江大学.
