基于深度高斯过程的飞行冲突探测方法研究
2021-04-09陈正茂
陈正茂,刘 洪,林 毅
(四川大学计算机学院 成都 610065)
随着我国民航运输业的快速发展,空中交通流量急剧增加、空域拥堵日趋严重,这对空中交通运行安全提出了极大的挑战。作为民航空中交通管制研究的重点,飞行冲突探测通过提前检测空域内可能发生的飞行冲突来辅助空中交通管制员处理应急情况,对保证空中交通运行安全具有重大意义。飞行冲突探测的基本思路是通过监视设备探测到的航空器当前位置及其相关运动信息和趋势预测其飞行轨迹,并基于预测轨迹判断飞机之间是否会发生飞行冲突[1]。根据冲突探测处理时间段,飞行冲突探测可以分为短期冲突探测(一般几分钟)和中期冲突探测(一般20~30 min),其区别在于短期冲突探测精度较高但预警告警时间提前量较短,中期冲突探测则反之。已有的研究方法主要分为:
1)确定型:将航空器的预测轨迹当作一条由确定轨迹点组成的直线,判断航班飞行位置是否与其他航空器冲突[2-3];
2)最大保护区情况:在考虑相关因素(飞行参数、天气等)的基础上为航班飞行设置一个较大保护区,其他任何航空器均不能侵犯该保护区[4];
3)概率型:综合考虑上述两种情况认为航空器各时刻的位置服从一个概率分布。预测时间越近的位置点分布误差较小,越远的分布误差较大[5-6]。
从上述研究看出,航班飞行冲突探测均是基于航班飞行轨迹预测,且概率型冲突探测方法是一种更为合理的方法。现有的飞行冲突探测孤立地预测飞行位置点,没有充分挖掘航班飞行轨迹的时序特点。因此本文基于航班飞行轨迹的高斯分布特性[6]引入高斯过程预测航班未来的飞行轨迹。高斯过程联合变量分布在时序上的相关性,可以充分对不同时刻间变量(轨迹位置)概率分布的关联性进行建模。借鉴已有的基于深度学习的航班轨迹预测方法[7],本文融合深度学习层级结构和高斯过程,提出基于深度高斯过程的航班飞行轨迹预测方法,并将其应用到飞行冲突探测中,预测时间范围为0~10 min。该方法不仅能预测航班未来飞行的标称轨迹,还可以预测各更新时刻航班位置的可信区间及其概率分布。可以看出,深度高斯过程的优点为概率型飞行冲突探测方法提供了良好的数据基础。
本文首先建立预测航班飞行轨迹的深度高斯过程模型,然后通过航班历史飞行轨迹学习和优化模型参数。航班历史飞行轨迹是航班在考虑了飞行过程中的真实环境因素产生的,已被证明是可行且更加高效、安全和有完善保障的飞行路径[8]。在预测航班飞行的标称轨迹及其可信区间的概率分布基础上,本文引入了概率型飞行冲突探测方法。基于蒙特卡罗(Monte Carlo)统计模拟和马尔科夫链蒙特卡罗(Markov chain Monte Carlo, MCMC)采样,最终计算航班飞行冲突概率。实验结果表明,本文提出的航班轨迹预测方法较现有算法的具有更加高的精度和稳定性,且能预测飞行轨迹的可信区间;同时,基于深度高斯过程的冲突探测算法能够提高航班飞行冲突告警的精度和预警时间提前量,可以更好地支撑空中交通安全运行。
1 高斯过程与深度高斯过程
高斯过程(Gaussian process, GP)是观测数据在一个连续域(时间或空间)的统计模型,连续域中的每个时间或空间点均与一个服从高斯分布的随机变量相关联,这些随机变量的任意有限集合是服从多元高斯分布,高斯过程可理解为这些随机变量的联合分布。高斯过程由均值函数μ(x)和协方差函数k(x,x*)确定[9],即:



对于未知输入数据Z=[z1,z2,···,zm]T,GP 预测其对应分布为f*= f(Z),考虑高斯分布的性质将预测过程描述为以下联合分布:



由高斯分布性质可知,其方差描述了预测值在均值某一邻域范围的概率分布情况。
深度高斯过程(deep GP)是一种基于高斯过程映射的深度置信网络(deep belief network, DBN)[10],网络采用多变量GP 进行层间建模,保持了深度神经网络分层级的结构,再使用高斯过程处理不同层节点之间的非线性映射关系。输入数据在隐藏层中间经过包含不同超参数的高斯过程映射,最终得到模型的输出,只包含一层的深度高斯过程即为标准的高斯过程。在深度高斯过程中,定义如下3 类节点[11]:
1) 输出节点,Y ∈ℜN×D;
在深度神经网络结构中,所有隐藏节点 Xh既是上一层的输出又是下一层的输入。考虑一个如图1所示的深度高斯过程,以高斯过程作为映射函数,其信息传递规则为:


图1 深度高斯过程示例
图中神经元之间的映射为fY~GP(0,kY(X,X))和fX~GP(0,kX(Z,Z))两个高斯过程。高斯过程定义了具有自动确定相关性(automatic relevance determination, ARD)的协方差函数,如式(8)所示,对于不同的隐藏层上的神经网络节点都有一个不同的权重参数 ωq,通过这个权值参数可以控制相关节点之间的信息传输以找到最优化的模型参数。

2 航班飞行轨迹预测算法
众所周知,飞机在飞行过程中会受到诸多随机因素的影响,很难准确地按照规划的航迹飞行,而是飞行在其规划区域周围的空间邻域。航班飞行轨迹预测即是预测未来某个时间点航班的飞行位置,因此本文提出以高斯过程作为映射函数将航班飞行轨迹预测用高斯过程回归的方式实现。同时考虑神经网络层间的非线性变化关系,通过历史航班轨迹数据学习并优化模型的相关参数,提高其非线性建模能力,进而实现高精度的航班飞行轨迹预测。
由于不同的航班在相同的航路段飞行特征具有相似性,这些历史航班轨迹主要包含预测航班在历史执行过程中经过该行路段的飞行轨迹。在航路段上的历史飞行数据包含了足够的飞行特征以描述航班在当前航段飞行需要满足的运动模式和限制条件。图2 表示了某一航路段的历史航班飞行轨迹,其中飞机方向表示了航班流向,直线代表了不同航班的飞行轨迹。从图中可以看出,航班在某一航段飞行时的轨迹具有极高的相似性。

图2 某航路历史飞行轨迹
本文历史飞行轨迹数据集组织结构为:

式中,HT 为某航班F 次历史飞行的轨迹数据;轨迹 Trj是一个时序序列,包含 Tj个运动状态更新信息。航班飞行轨迹预测主要关注其空间位置序列与时间的对应关系,即经纬度和高度。为了统一各运动状态的单位,本文将经纬度转换到同一投影坐标系下,轨迹点的位置信息分别使用符号x、 y和z表示,单位为m。
给定航班历史轨迹,本文研究预测航班未来飞行轨迹{t →(x,y,z)|t ∈[1,T]},即预测时刻t ∈[1,T]对应的飞机位置(x,y,z), T为预测周期。在本文深度高斯过程框架下,航班估计预测方法如下:
1) 航班历史飞行轨迹(已知数据)对应高斯过程 X;
2) 预测时间点t ∈[1,T](未知数据)对应着高斯过程 Z,通过这种对应关系将轨迹预测与深度高斯过程关联。
3) 高斯过程预测框架下,其每个预测时间点t ∈[1,T]的均值(式(4))即为航班在该时刻的标称位置点,方差描述了该时刻位置点的分布关系(服从高斯分布)。
因此,本文深度高斯过程轨迹预测方法不仅能预测航班飞行的标称轨迹,还能预测其各时刻的可信区间概率分布。由于各航班轨迹在数据更新过程中的时间不一致,因此本文采用基于当前预测位置的相对时间(从0 开始)作为输入t,避免数据对准带来的不必要误差。如图3 所示,假设需要进行轨迹预测的航班处于位置 p0,而某历史轨迹的最近两点位置分别为 p1和 p2,即历史数据中的轨迹位置信息为(t1,p1)和(t2,p2)。

图3 飞行轨迹预测相对时间点位置
如前所述,将位置点p0对应的相对时刻设为t=0,原则上,应该选取航向方向上最近点作为该航班训练数据的第一点,即图中的p2,如何确定p2对应的相对时刻ts非常重要,它决定了后续轨迹点的相对时刻。如果航班轨迹点的更新不稳定可能导致这两点之间的时间和距离相差较大,本文针对这一问题提出了如下方法来确定历史轨迹的起点时刻:

式中, ||·||代表两点之间的欧式距离。在计算轨迹开始时间ts之后,该航班在后续所有轨迹点的更新时间减去ts即为其相对时刻。单个航班的多次飞行轨迹数据采集的相对时间点和位置点存在多样性,提高了模型在预测未知数据时的泛化性能。
高斯过程的优点是利用训练数据通过核函数衡量不同时序数据之间相似性来预测未知输入的结果,同时由于其高斯概率特性还能预测出更新时刻的可信区间和概率分布。本文提出的航班飞行轨迹预测模型既能保持深度神经网络在非线性特征建模的能力,又具有高斯过程在贝叶斯框架下建模的优势。
3 飞行冲突探测
本文在基于深度高斯过程航班飞行轨迹预测的基础上,实现了任意飞机对之间的概率型飞行冲突探测方法。假设局部空域内任意两架航空器 Ai和Aj,其飞行轨迹位置L·=[x,y,z]T相互独立[12]并服从高斯过程fi(Li)~GPi(xi,Σi)和 fj(Lj)~GPj(xj,Σj),那么两架航空器之间发生飞行冲突的概率可表示为:

由于GP 是对时序数据的描述,因此需要考察每个时间点上两架航空器的位置差小于安全距离的概率。当两者之间发生冲突的概率大于预设阈值时,则可以认为两架航空器在未来会发生飞行冲突。通过判断两架航空器在任意时间点上的冲突,可以得到两架航空器发生冲突的时间点及位置。一般来说,航空器的保护区在飞行的水平、垂直和高度方向的安全距离不同[13],因此上述问题可以转换为:

上述航空器位置分布的距离函数积分在应用中不易实现。因此,本文提出基于蒙特卡罗统计模拟来计算两者之间发生冲突的概率。通过从预测分布的大量位置采样点来估计两者之间距离小于安全值的概率。在任意时刻t从两架航空器的位置分布中分别采样li和 lj,其中∀i,j ∈[1,N],假设有n个点之间的距离小于安全距离,那么认为在该时刻的两者发生冲突的概率pij(t)=n/N。由于单个航空器预测位置的高斯过程时序和位置分量之间不独立,本文引入MCMC 算法从两者位置分布中采样,该算法基于马尔可夫假设对相邻时间点的运动状态转移进行描述实现时序数据随机采样,是目前较为高效的时序数据采样算法[14]。MCMC 实现步骤如下:
1)假设初始位置L0=[x0,y0,z0]T为探测时刻航空器位置;
2) 任意时刻使用式(14)进行航空器位置采样,直至冲突探测的时间段。

4 仿真实验及分析
4.1 实验数据
使用如下数据验证本文提出的航班飞行轨迹预测算法及冲突探测方法的性能。
1)轨迹数据库来源于某大型空中交通流量管理系统,选取在某管制中心区域内飞行的航班作为实验对象;
2)以航班2015 年7 月31 日-2015 年8 月30 日的历史飞行轨迹作为训练数据学习和优化深度高斯过程的模型参数,预测其2015 年8 月31 日的飞行轨迹,预测周期4 s;
3)选取2015 年8 月31 日13:00-15:00 时段内分析的航班作为航班飞行轨迹预测的数据样本;
4)由于数据中没有发生冲突的航班对,因此通过修改飞行时间模拟生成50 对发生冲突的航班并测试本文提出的冲突探测算法性能。
4.2 实验设置
本文的深度高斯过程模型由基于英国谢菲尔德大学的Neil Lawrence 教授发布的PyDeepGP 实现。模型包含1 个隐藏层,其高斯过程的变量维度为40,核函数选择径向基函数(radial basis function,RBF),模型参数通过模型学习优化。模型训练过程包含800 个epoch。飞行冲突探测的水平安全距离为5 n mile,冲突概率阈值设置为0.6。
此外,为了验证本文研究方法的有效性,实验选取基于运动学和飞行计划[12]航班轨迹预测方法作为基线模型比较其预测精度;选取基于预测时刻的概率型(高斯模型)冲突探测方法作为基线模型,比较其冲突探测性能[12]。任意两个轨迹点之间的距离误差计算如下[15]:

式中, p 表示预测点位置; c表示采集点位置。由于本文提出的算法预测了航班飞行标称轨迹和可信区间概率分布,因此实验考察各预测时间点的平均距离误差及其偏差可信区间概率范围。根据高斯分布特性,可信区间概率范围越小说明预测的结果离分布的均值越近,即预测越准确。冲突探测算法考察算法探测的时间提前量和虚警率。
4.3 航班飞行轨迹预测算法实验结果
根据实验设置,本文首先使用历史数据优化了深度高斯过程参数并预测指定实验段内的航班飞行轨迹,计算每个时间点的平均距离误差和偏差分布范围。实验结果如图4 所示,横轴表示预测周期(两小时共计1 800 个),纵轴表示每个周期空域内所有航班飞行轨迹预测的平均距离误差。

图4 飞行轨迹预测实验结果
从图中的实验结果可知,本文方法较基于运动学和飞行计划的飞行轨迹预测方法具有更低的平均距离误差,约为373.04 m 对比438.88 m。同时,本文方法在各时刻的预测误差较基线算法更加平稳(各时刻的平均距离误差较小),这个现象说明了引入高斯过程建立航班轨迹的时序相关性模型的重要性。考察预测位置偏差可信区间,其分布在均值附近±33.28%的范围内,即在高斯分布均值的0.43 倍方差误差范围。图5 为本文方法预测航班轨迹分布可信区间(椭圆形)的示例,且轨迹在其中的位置分布概率服从高斯分布。可以看出,本文提出的算法预测的航班位置点聚集在离均值点较近的区域、误差偏差较小,预测结果较为稳定。本文方法较现有方法最大的优点就是通过模型一步完成可信区间预测,不再需要人为地对航班轨迹的分布进行建模,降低了对专家知识的依赖。
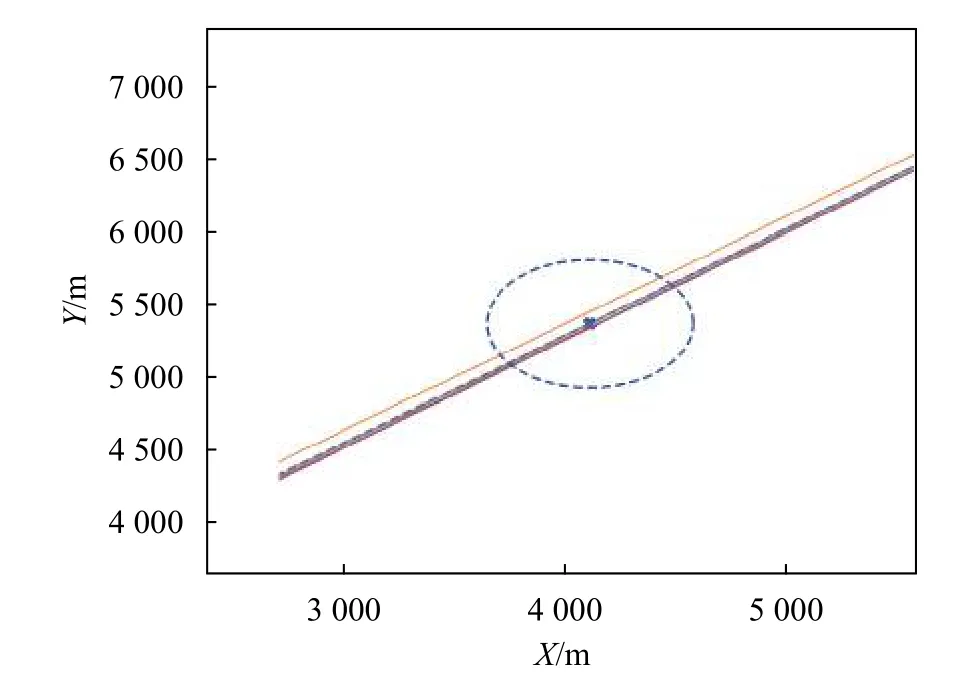
图5 轨迹分布范围示例
4.4 飞行冲突探测算法实验结果
在预测航班飞行轨迹的基础上,本文实现了概率型飞行冲突探测算法,实验结果如表1 所示。

表1 冲突探测算法实验结果
从实验结果可以看出,本文方法不论在平均预警时间提前量或者虚警率方面均优于基线模型。实验结果说明,基于深度高斯过程可以更加准确地建立航班飞行轨迹位置之间的时序关联性。更多的预警时间提前量以及更低的虚警率可以为空中交通管制员处理应急情况提供更多的决策支撑。
5 结 束 语
飞行冲突探测是空中交通管理系统的重要组成部分,而航班飞行轨迹预测是其最为核心的基础技术。本文在已有研究的基础上,提出了一种基于深度高斯过程的飞行冲突探测算法。算法首先基于高斯过程对航班飞行轨迹的时序相关性及其位置分布建模,并将其预测的飞行轨迹运用到概率型飞行冲突探测中。深度高斯过程兼具深度模型在非线性特征建模的能力以及高斯过程的优良可解释性。飞行轨迹预测结果不仅包含航班未来飞行的标称轨迹,还包括各时刻轨迹位置的可信区间及其概率分布,为飞行冲突探测打下了良好的基础。在真实的数据集上证明了本文提出的飞行轨迹预测算法的正确性和精度,同时基于模拟的飞行冲突验证了深度高斯过程对冲突探测算法性能的积极作用。
在下一步工作中,本文会进一步优化深度高斯过程的模型结构和参数学习效率,同时将其应用到更多的空中交通研究中。
